
1、关节空间轨迹的生成
按照关节空间轨迹规划的方法所得的计算结果都是有关各个路径段的数据。控制系统的轨迹生成器利用这些数据以轨迹更新的速率具体计算出关节的位置、速度和加速度。对于三次多项式,轨迹生成器只需要随t的变化不断按公式计算位置、速度和加速度。当到达路径段的终止点时,调用新路径段的三次多项式系数,重新把t置成零,继续生成轨迹即可。
对于带抛物线拟合的直线样条曲线,每次更新轨迹时,应首先检测时间t的值以判断当前是处在路径段的直线区段还是抛物线拟合区段。在直线区段,对每个关节的轨迹计算如下:
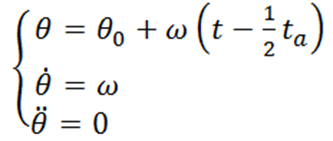
式中: ω、为根据驱动器的性能而选择的定值;故可计算出关节的位置、速度和加速度。
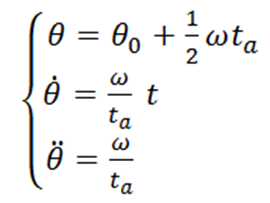
在起始点抛物线拟合区段,对各关节的轨迹计算如下:
终止点的抛物线段与起始点抛物线段是对称的,只是其加速度为负,因此可按照下式计算:
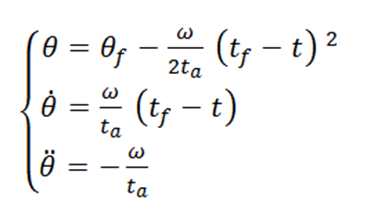
上式中tf为该段抛物线终止点时间。轨迹生成器按照以上两式随时间t的变化实时生成轨迹。当进入新的运动段以后,必须基于给定的关节速度求出新的关节位置、速度和加速度,根据边界条件计算抛物线段的系数,继续计算,直到计算出所有路径段的数据集合。
2、直角坐标空间轨迹的生成
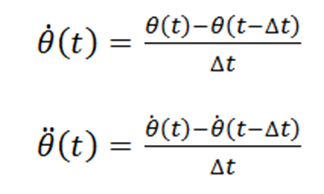
前面已经介绍了直角坐标空间轨迹规划的方法,在直角坐标空间的轨迹必须变换为等效的关节空间变量。先通过逆运动学方程求出的关节位置,然后用逆雅可比矩阵计算关节速度,用逆雅可比矩阵及其导数计算角加速度,这样计算量非常大。在实际中往往采用简便的方法,先根据逆运动学求出关节运动轨迹,即先把操作空间变量转换成关节角矢量,然后再由数值微分根据下式计算关节的速度和加速度。
最后,将轨迹规划器所生成的关节的位置、速度和加速度送往机器人的控制系统。至此轨迹规划的任务才算完成。
加利福尼亚理工学院实验室研究使用的一个三自由度机器人有两根连杆,每根连杆长9英寸,如图5.13所示。假设定义坐标系使得当所有关节角均为0时,手臂处于垂直向上状态。要求机器人沿直线从点(9,6,10)移动到点(3,5,8)。求3个关节在每个中间点的角度值,并绘制出这些角度值。已知该机器人的逆运动学方程为:
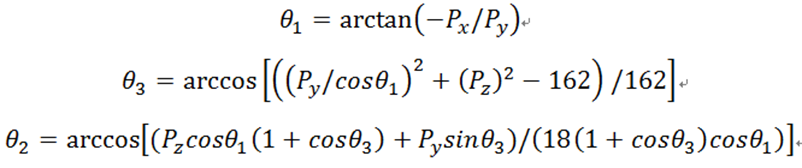
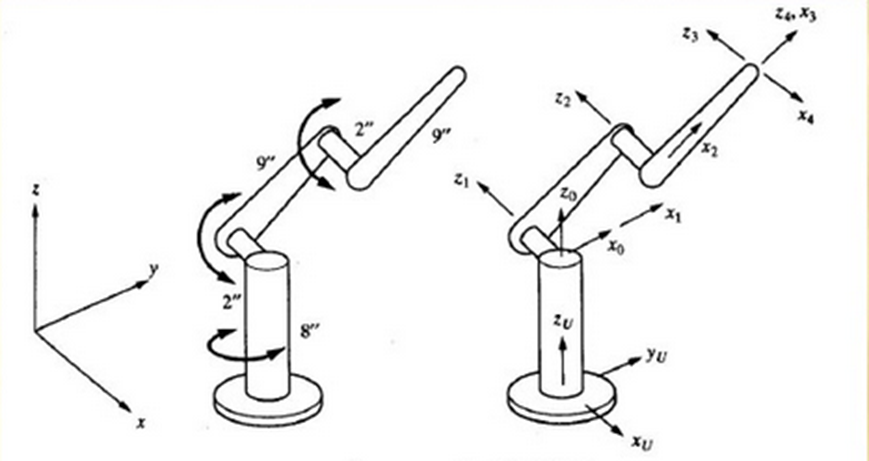
图5.13 机器人及其坐标系
解:
在实际应用中起点和终点之间要分成许多很小的部分。但为了简便起见,求解本题时只将起点和终点之间分成10段。每个中间点的坐标可简单的通过将起点和终点之间的距离进行10等分得到。通过求解逆运动学方程即可算得每个中间点的关节角,结果如表5—1所示。相应的关节角曲线如图5.14所示。
表5—1 机器人的手坐标系坐标及关节角
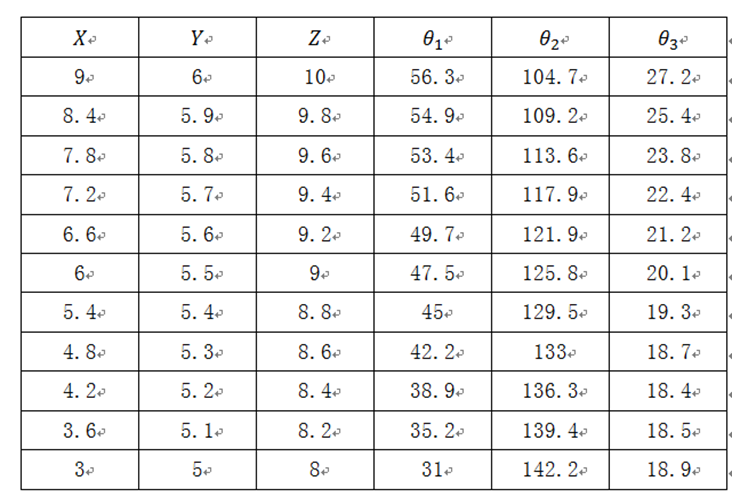
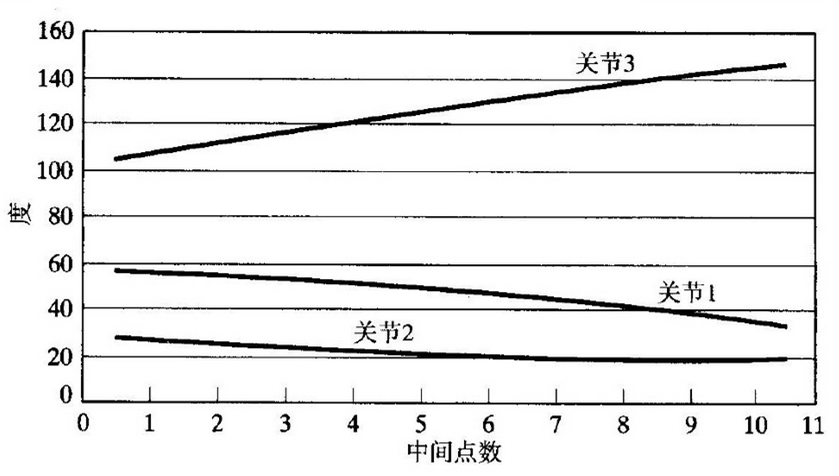
图5.14 机器人的关节角曲线

