
1、直角坐标空间描述
图5.11所示为平面两关节机器人,假设末端操作器要在A、B两点之间画一条直线。为使机器人从点A沿直线运动到点B,将直线AB分成许多小段,并使机器人的运动经过所有的中间点。为了完成该任务,在每一个中间点处都要求解机器人的逆运动学方程,计算出一系列的关节量,然后由控制器驱动关节到达下一目标点。当通过所有的中间目标点时,机器人便到达了所希望到达的点B。与前面提到的关节空间描述不同,这里机器人在所有时刻的位形运动都是已知的,机器人所产生的运动序列首先在直角坐标空间描述,然后转化为关节空间描述。
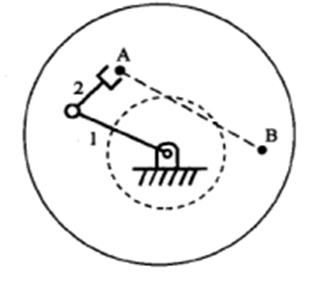
图5.11 直角坐标空间轨迹规划的问题
由此也容易看出,采用直角坐标空间描述的计算量远大于采用关节空间描述的,然而使用该方法能得到一条可控、可预知的路径。
直角坐标空间轨迹在常见的直角坐标空间中表示,因此非常直观,人们也能很容易地看到机器人末端操作器的轨迹。然而,直角坐标空间轨迹计算量大,需要较快的处理速度才能得到类似于关节空间轨迹的计算精度。此外,虽然在直角坐标空间中得到的轨迹非常直观,但难以确保不存在奇异点。
如图5.11中,连杆2比连杆1短,所以在工作空间中从点A运动到点B没有问题。但是如果机器人末端操作器试图在直角坐标空间中沿直线运动,将无法到达路径上的某些中间点。该例表明在某些情况下,在关节空间中直线路径容易实现,而在直角坐标空间中的直线路径将无法实现。此外,两点间的运动有可能使机器人关节值发生突变。为解决上述问题,可以指定机器人必须通过的中间点,以避开这些奇异点。
正因为直角坐标空间轨迹规划存在上述问题,现有的多数工业机器人轨迹规划器都具有关节空间和直角坐标空间轨迹生成两种功能。用户通常使用关节空间法,只有在必要时,才采用直角坐标空间法。
2、直角坐标空间的轨迹规划
直角坐标空间轨迹与机器人相对于直角坐标系的运动有关,如机器人末端操作器的位姿便是沿循直角坐标空间的轨迹。除了简单的直线轨迹以外,也可以用许多其他的方法来控制机器人,使之在不同点之间沿一定轨迹运动。而且,用于关节空间轨迹规划的方法都可用于直角坐标空间的轨迹规划。
直角坐标空间轨迹规划与关节空间轨迹规划的根本区别在于,关节空间轨迹规划函数生成的值是关节变量,而直角坐标空间轨迹规划函数生成的值是机器人末端操作器的位姿,需要通过求解逆运动学方程才能转化为关节变量。因此,进行直角坐标空间轨迹规划时必须反复求解逆运动学方程,以计算关节角。
上述过程可以简化为如下循环:
(1)将时间增加一个增量t;
(2)利用所选择的轨迹函数计算出手的位姿;
(3)利用机器人逆运动学方程计算出对应末端操作器位姿的关节变量;
(4)将关节信息送给控制器;
(5)返回到循环的开始。
在工业应用中,最实用的轨迹是点到点之间的直线运动,但也会碰到多目标点(如中间点)间需要平滑过渡的情况。
为实现一条直线轨迹,必须计算起始点和终止点位姿之间的变换,并将该变换划分为许多小段。起始点构形和终止点构形之间的总变换R可通过下面的方程计算:
可以用以下几种方法将该总变换化为许多的小段变换。
(1)将起始点和终止点之间的变换分解为一个平移运动和两个旋转运动。平移是指将坐标原点从起始点移动到终止点;旋转分别是指将末端操作器坐标系与期望姿态对准和将末端操作器坐标系绕其自身轴转到最终的姿态。这三个变换是同时进行的。
(2)将起始点和终止点之间的变换R分解为一个平移运动和一个绕点轴的旋转运动。平移仍是将坐标原点从起始点移动到终止点,而旋转是将手臂坐标系与最终的期望姿态对准,两个变换也是同时进行的,如图5.12所示。
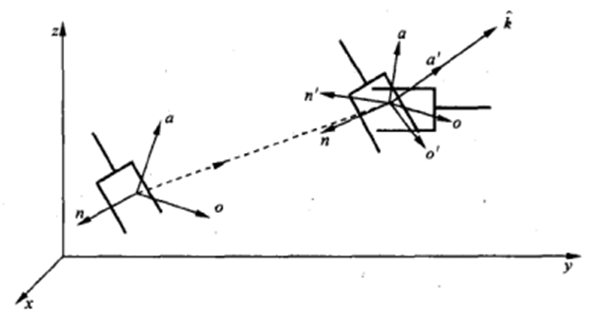
图5.12 直角坐标系空间轨迹规划中起始点和终止点之间的变换
(3)对轨迹进行大量分段,以使起始点和终止点之间有平滑的线性变换。这样会产生大量的微分运动,利用微分运动方程,可将末端坐标系在每一段上的位姿与微分运动、雅可比矩阵及关节速度联系在一起。不过,采用该方法时需要进行大量的计算,并且仅当雅可比矩阵存在时才有效。

