
【案例导入】
自动叠衣服的神器真的诞生了!它就是FoldiMate机器人,专长,叠衣服;爱好,还是叠衣服。该叠衣机能够一次性自动折叠10到15件衣服,并且能在叠衣过程中添加芳香剂或熨平褶皱部位。当你需要整理大量衣服时,只需将衣物放置在叠衣机的特制挂钩上,接下来的工作将会由它自动完成,如图5.1所示。FoldiMate叠一件衣服只需10秒钟,一次能处理20件,同时还可以做去皱处理呢。整理好的衣服的直角,简直能令毕达哥拉斯哭泣,如图5.2。

图5.1 叠衣机折叠衣服 图5.2 处理好的衣服
1、工业机器人轨迹规划的定义
轨迹规划是指根据作业任务要求,确定轨迹参数并实时计算和生成运动轨迹。它是工业机器人控制的依据,所有控制的目的都在于精确实现所规划的运动。
2、轨迹规划涉及的一般性问题
工业机器人的作业可以描述成工具坐标系{T}相对于工作坐标系{S}的一系列运动。如图5.3所示将销插入工件孔中的作业可以借助工具坐标系的一系列位姿(i=1,2,···,n) 来描述。这种描述方法不仅符合机器人用户考虑问题的思路,而且有利于描述和生成机器人的运动轨迹。
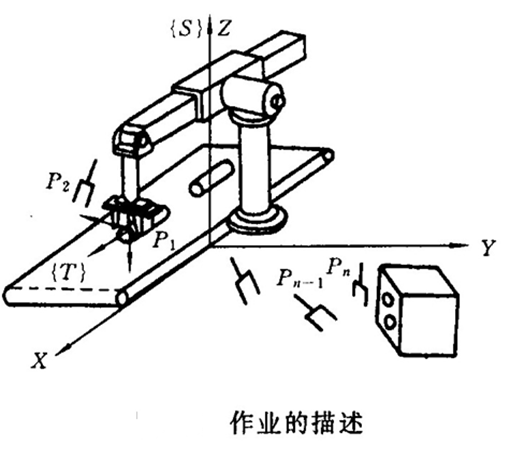
图5.3 销插入工件孔
工具坐标系相对于工作坐标系的运动来描述作业路径。它把作业路径的描述与具体的机器人、手爪或工具分离开来,形成了模型化的作业描述方法。从而使这种描述既适用于不同的机器人,也适用于同一机器人上装夹不同规格的工具。有了这种描述方法,就可以把图5.4所示的机器人从初始状态运动到终止状态的作业看作是工具坐标系从初始位置到终止位置的坐标变换。
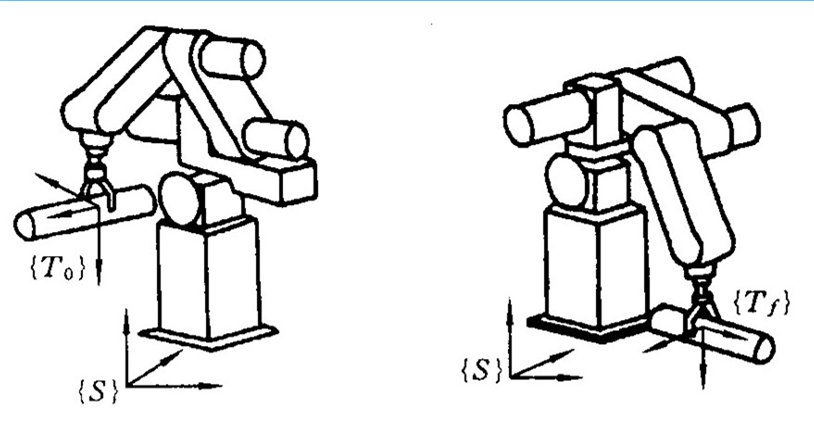
初始状态 终止状态
图5.4 机器人从初始状态运动到终止状态的作业
当需要更详细地描述运动时,不仅要规定机器人的起始点和终止点,而且要给出介于起始点和终止点之间的中间点,也称路径点。这时,运动轨迹除了位姿约束外,还存在着各路径点之间的时间分配问题。例如,在规定路径的同时,必须给出两个路径点之间的运动时间。
机器人的运动应当平稳,不平稳的运动将加剧机械部件的磨损,并导致机器人的振动和冲击。在规划中,不仅要规定机器人的起始点和终止点, 而且要给出中间点(路径点)的位姿及路径点之间的时间分配, 即给出两个路径点之间的运动时间。
轨迹规划既可在关节空间中进行, 即将所有的关节变量表示为时间的函数,用其一阶、二阶导数描述机器人的预期动作, 也可在直角坐标空间中进行,即将手部位姿参数表示为时间的函数, 而相应的关节位置、 速度和加速度由手部信息导出。
3、轨迹规划的生成方式
运动轨迹的描述或生成有以下几种方式:
(1)示教—再现运动:即由人手把手示教机器人,定时记录各关节变量,得到沿路径运动时各关节的位移时间函数;再现时,按内存中记录的各点的值产生序列动作。
(2)关节空间运动:这种运动直接在关节空间里进行。由于动力学参数及其极限值直接在关节空间中描述,所以用这种方式求费时最短的运动很方便。
(3)空间直线运动:这是一种直角空间里的运动,它便于描述操作空间,计算量小,适宜于简单的作业。
(4)空间曲线运动:这是一种在描述空间中可用明确的函数表达的运动,如圆周运动、螺旋运动等。

