
1、牛顿—欧拉方程
牛顿—欧拉方法直接利用牛顿力学的刚体动力学知识,导出机器人逆动力学的递推公式,即已知机器人各连杆的速度、角速度及转动惯量,就可以利用牛顿—欧拉刚体动力学公式导出机器人各关节执行器的驱动力及驱动力矩的递推公式。然后再由它归纳出机器人动力学的数学模型—机器人机械系统的矩阵形式的运动方程。
(1)连杆的速度与加速度分析
机器人一般由多个连杆通过转动或移动关节连接而成,为了用牛顿—欧拉法建立机器人的动力学方程,需要讨论机器人的瞬时运动状态,分析组成机器人的各连杆的速度和加速度及其运动的传递。
设连杆上的任一点P 在连杆坐标系 内的位置矢量为
内的位置矢量为 ,连杆坐标系 相对于参考系
,连杆坐标系 相对于参考系 的位置矢量为
的位置矢量为 ,旋转矩阵为
,旋转矩阵为 ,则点P 在两坐标系中的位置矢量
,则点P 在两坐标系中的位置矢量 之间的关系满足公式
之间的关系满足公式
(2)动力学基本方程
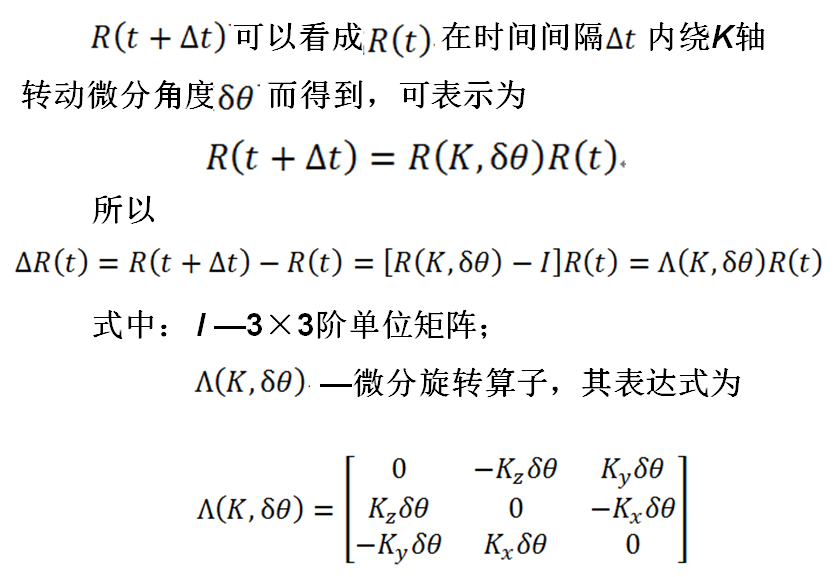
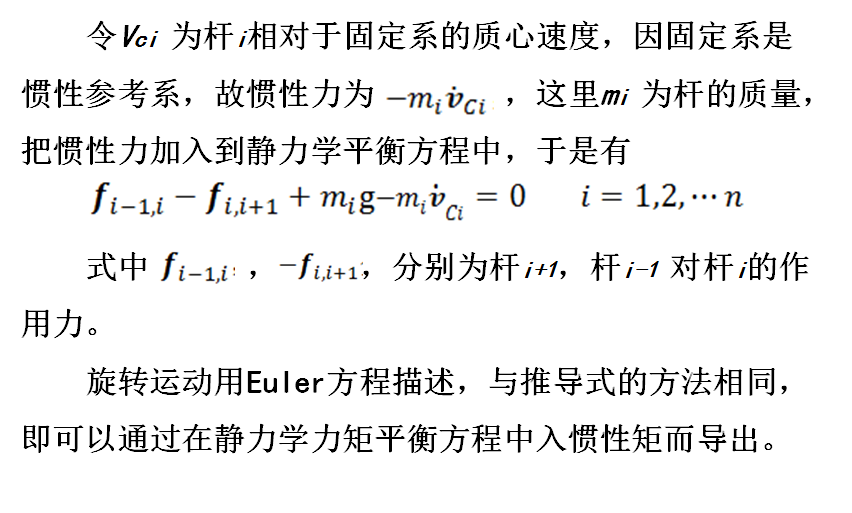
一个刚体的运动可分解为固定在刚体上的任意一点的移动以及该刚体绕这一定点的转动两部分。刚体动力学方程也可以用两个方程表达:一个用以描述质心的移动,另一个描述质心的转动,前者称为质点运动方程,后者称为欧拉运动方程。 当刚体绕过质心的轴线旋转时,角速度ω,角加速度 ,惯性张量与作用力矩n之间满足欧拉方程:
假设机器人手臂的单个杆件为自由体,所受的力和力矩如图4.10所示。
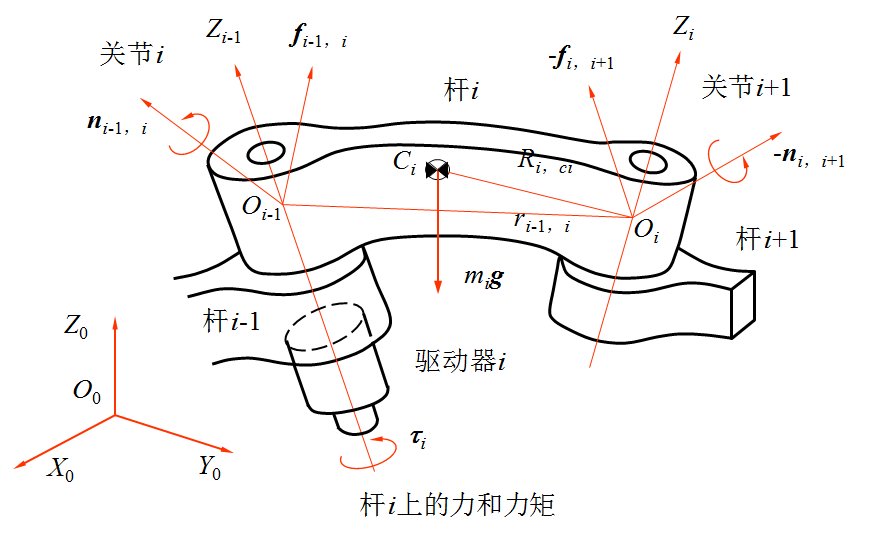
图4.10 杆i的自由体图
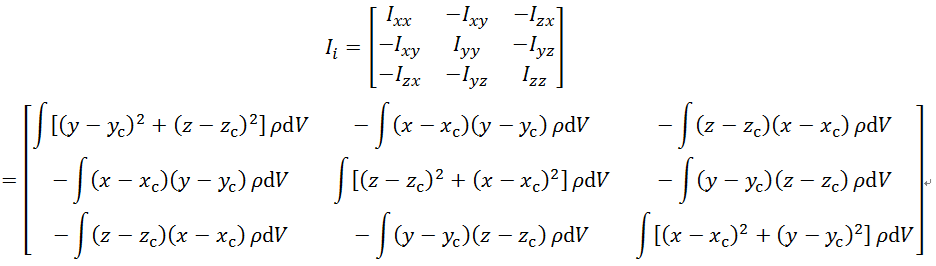
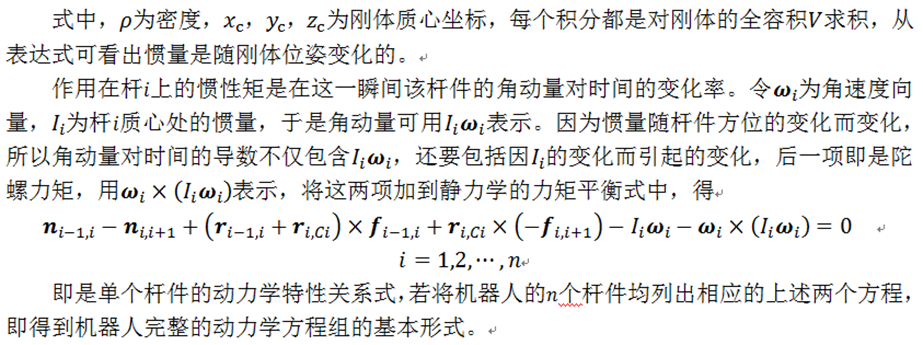
为了求出惯性矩,先看单个刚体的转动惯量或惯性积。假定一刚体绕通过其质心的任意方向的轴线旋转,则在固定坐标系内刚体的转动惯量可用一个3×3的对称阵表示,称为惯性矩阵:
2、拉格朗日运动方程
拉格朗日方法不仅能以最简单的形式求得非常复杂的系统动力学方程,而且具有显式结构,物理意义比较明确,对理解机器人动力学比较方便。
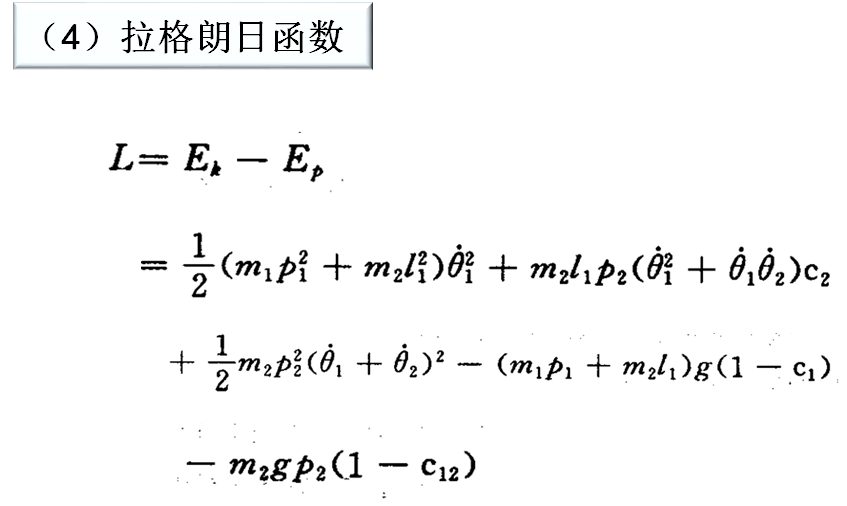
(1)拉格朗日函数
拉格朗日函数L的定义是一个机械系统的动能Ek和势能Ep之差,即
令(i=1,2,…,n)是使系统具有完全确定位置的广义关节变量, 是相应的广义关节速度。
(2)拉格朗日方程
系统的拉格朗日方程为
式中:Fi称为关节广义驱动力。如果是移动关节,则Fi为驱动力;如果是转动关节,则Fi为驱动力矩。
(3)用拉格朗日法建立机器人动力学方程的步骤
1)选取坐标系,选定完全而且独立的广义关节变量qi,i=1,2,…,n。
2)选定相应的关节上的广义力Fi,当qi是位移变量时,则Fi为力;当qi是角度变量时,则Fi为力矩。
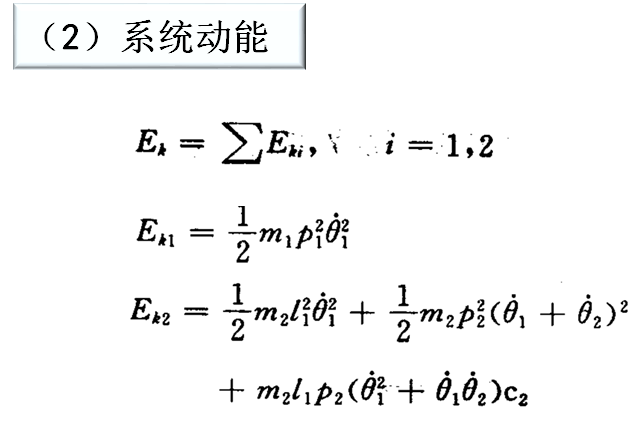
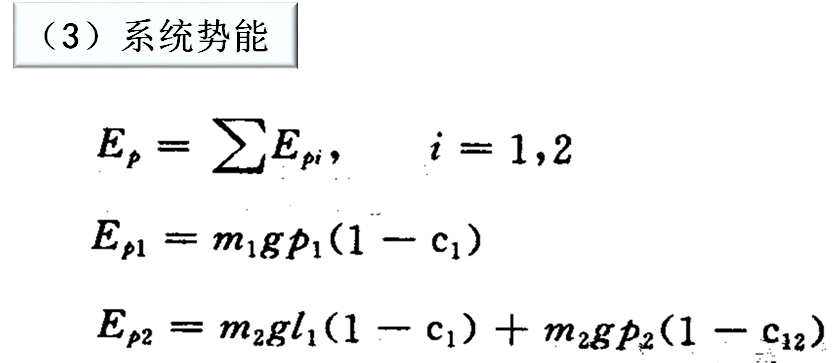
3)求出机器人各构件的动能和势能,构造拉格朗日函数
4)代入拉格朗日方程求得机器人系统的动力学方程。
综合实例:
二自由度平面关节机器人动力学方程
(1)广义关节变量及广义力的选定
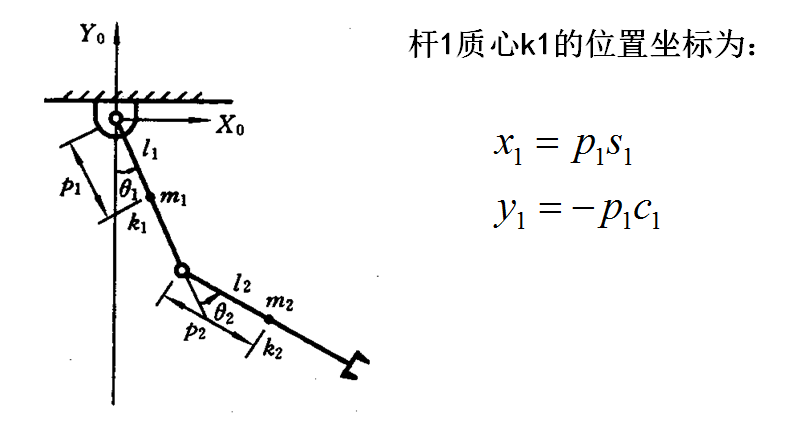
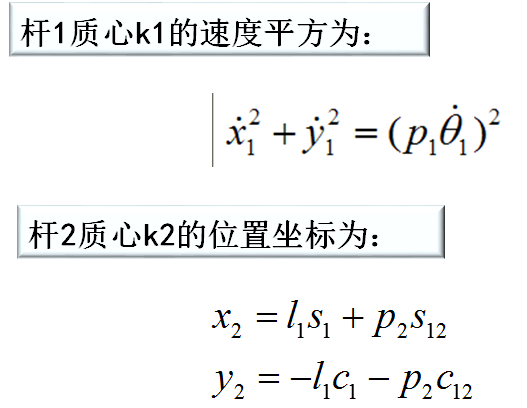
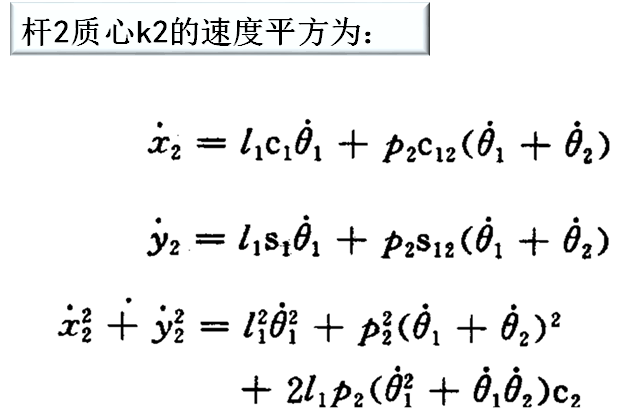
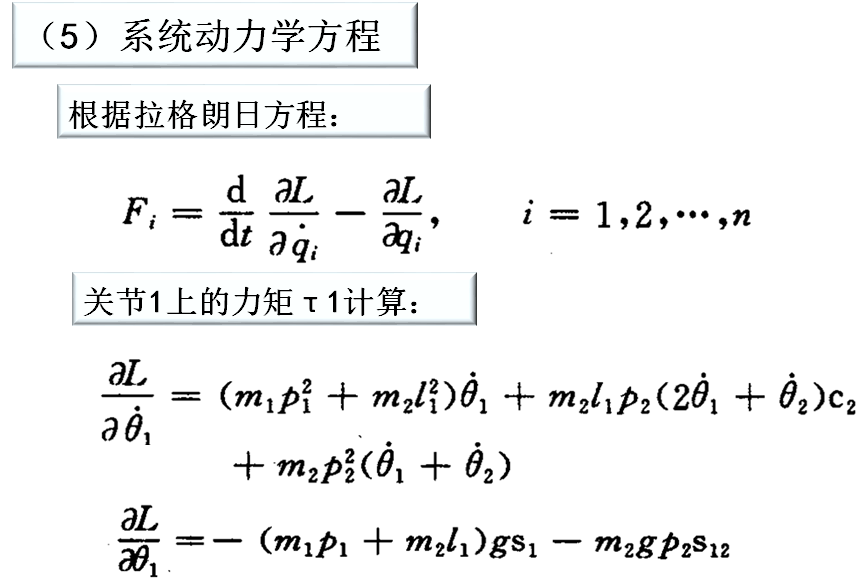
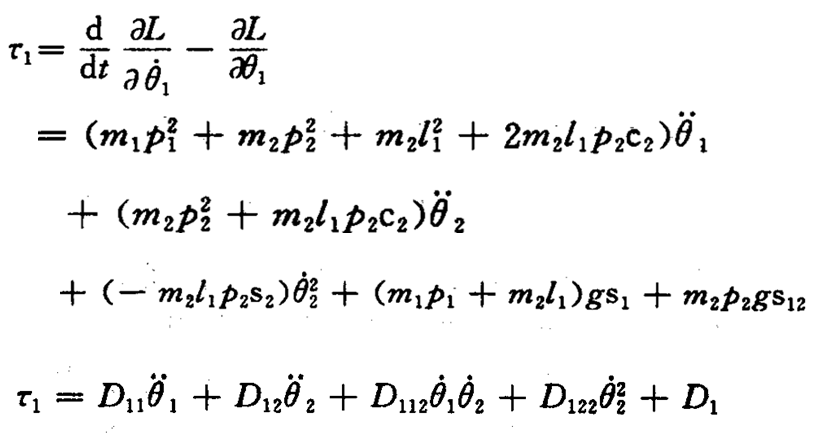
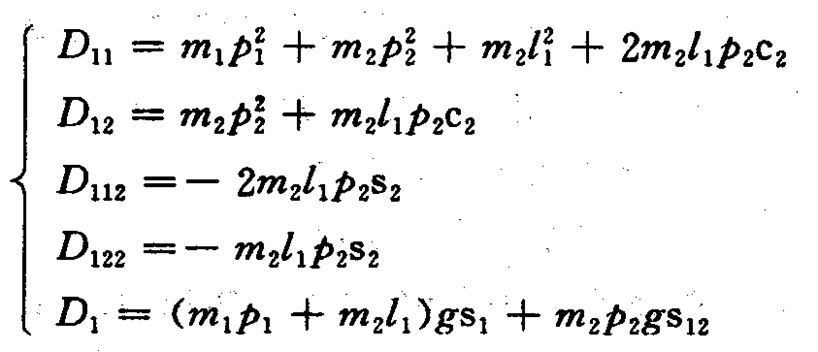
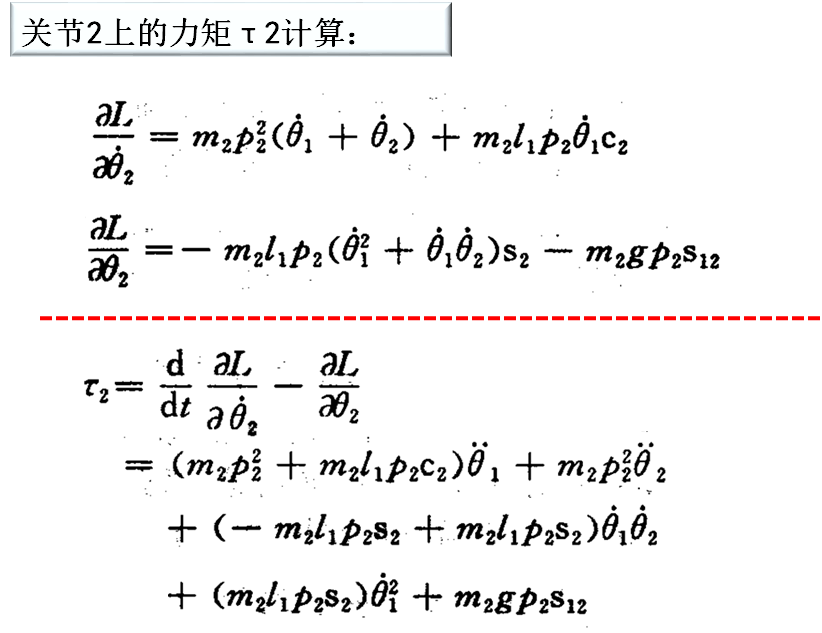
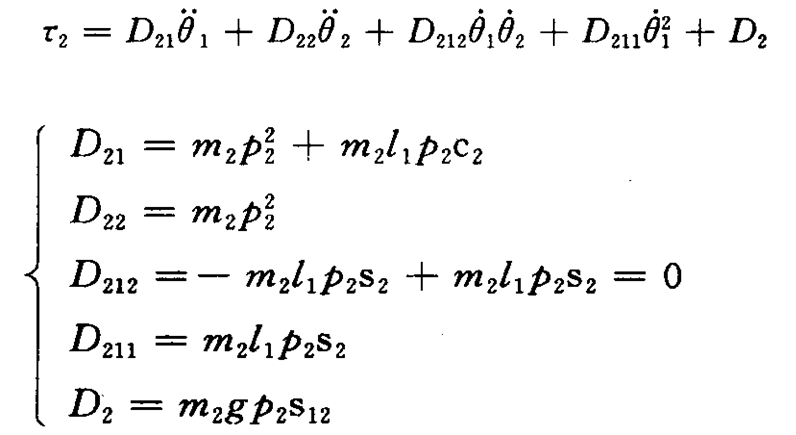
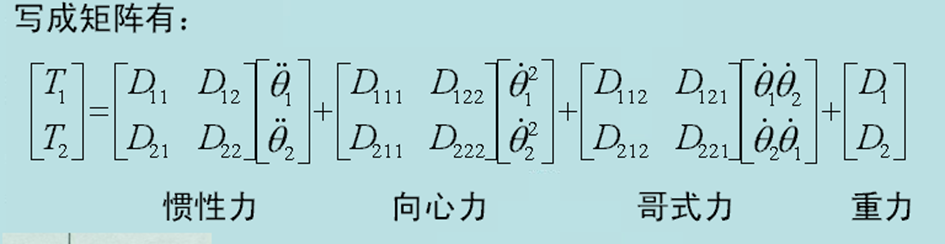
进行分析可知以下几点: