1、力和力矩分析
这里以操作臂中单个杆件为例分析受力情况。杆件i通过关节i和i+1分别与杆件i-1和杆件i+1相连接,两个坐标系{i-1}和{i}分别如下图所示。
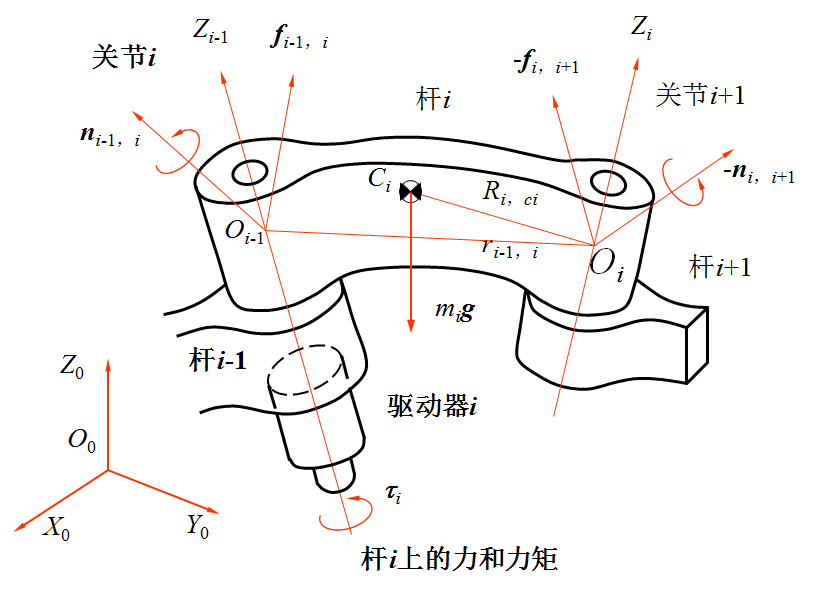
图中力和力矩
fi-1,i及ni-1,i——i-1杆通过关节i作用在i杆上的力和力矩;
fi,i+1及ni,i+1——i杆通过关节i+1作用在i+1杆上的力和力矩;
-fi,i+1及-ni,i+1——i+1杆通过关节i+1作用在i杆上的反作用力和反作用力矩;
fn,n+1及nn,n+1——工业机器人最末杆对外界环境的作用力和力矩;
-fn,n+1及-nn,n+1——外界环境对工业机器人最末杆的作用力和力矩;
f0,1及n0,1——工业机器人底座对杆1的作用力和力矩;
mig——连杆i的重量,作用在质心Ci上。
连杆i的静力学平衡条件
连杆i的力和力矩平衡方程式为:
式中: ri-1,i——坐标系{i}的原点相对于坐标系{i-1}的位置矢量;
ri,ci——质心相对于坐标系{i}的位置矢量。
假如已知外界环境对工业机器人最末杆的作用力和力矩,那么可以由最后一个连杆向第零号连杆(机座)依次递推,从而计算出每个连杆上的受力情况。
为了便于表示工业机器人手部端点的力和力矩(简称为端点力F),可将fn,n+1和nn,n+1合并写成一个6维矢量:
各关节驱动器的驱动力或力矩可写成一个n维矢量的形式,即:

式中: n——关节的个数;
τ——关节力矩(或关节力)矢量,简称广义关节力矩。
2、工业机器人力的雅克比矩阵
假定关节无摩擦,并忽略各杆件的重力,则广义关节力矩与工业机器人手部端点力F的关系可用下式描述:
式中:JT为n×6阶工业机器人力雅可比矩阵或力雅可比。
上式可用下述虚功原理证明如下:
考虑各个关节的虚位移为dqi,手部的虚位移为dX,如图所示。
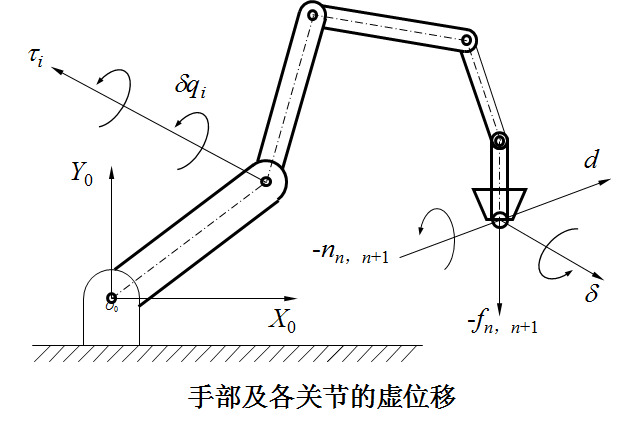
假设发生上述虚位移时,各关节力矩为(i=1,2,…,n),作用在工业机器人手部端点上的力和力矩分别为
和
。由上述力和力矩所做的虚功可以由下式求出:

或写成:

根据虚位移原理,工业机器人处于平衡状态的充分必要条件是对任意符合几何约束的虚位移,有:

注意到虚位移和
并不是独立的,是符合杆件的几何约束条件的。
利用式,dX=Jdq, 可写成:
可写成:

式中的表示几何上允许位移的关节独立变量,对于任意的
,欲使
=0,必有:
证毕。
式(3-23)表示在静力平衡状态下,手部端点力F向广义关节力矩映射的线性关系。式中与手部端点力F和广义关节力矩t之间的力传递有关,故叫作工业机器人力雅可比。很明显,力雅可比
正好是工业机器人速度雅可比J的转置。
3、机器人静力计算的两类问题
从操作臂手部端点力F与广义关节力矩τ之间的关系式可知,操作臂静力学可分为两类问题:
(1) 已知外界环境对工业机器人手部作用力F'(即手部端点力F=-F’),求相应的满足静力学平衡条件的关节驱动力矩τ。
(2) 已知关节驱动力矩τ,确定工业机器人手部对外界环境的作用力F或负荷的质量。
这类问题是第一类问题的逆解。这时
但是,由于工业机器人的自由度可能不是6,比如n>6,力雅可比矩阵就有可能不是一个方阵,则JT就没有逆解。所以,对这类问题的求解就困难得多,在一般情况下不一定能得到唯一的解。如果F的维数比τ的维数低,且J是满秩的话,则可利用最小二乘法求得F的估值。
[例] 如图4.9所示的一个二自由度平面关节型机械手,已知手部端点力F=[Fx,Fy]T,求对应于端点力F的关节力矩(不考虑摩擦)。
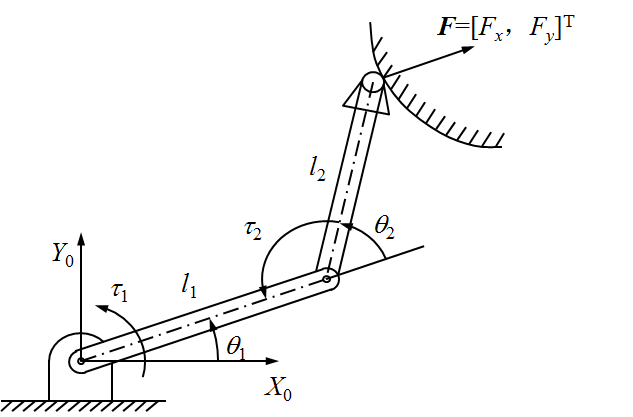
图4.9 手部端点力与等效关节力矩
解:
已知该机械手的速度雅可比矩阵为:

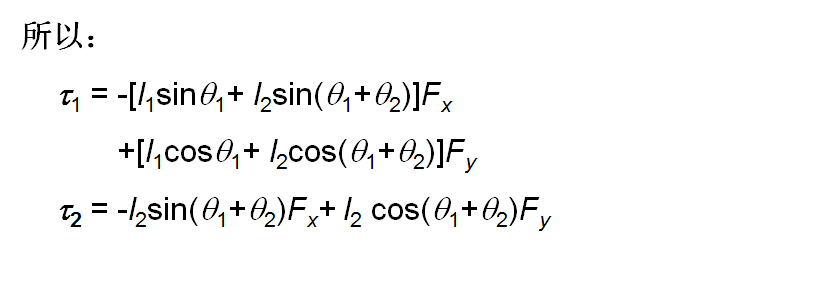
则该机械手的力雅可比为:

根据τ=JTF,得: