
【案例导入】
沙蚤机器人(SandFlea)是一种跳跃式机器人,由美国国防高级研究计划局(DARPA)联合波士顿动力公司共同研制,其结构如图4.1所示,图4.1(a)为“沙蚤”机器人行驶状态,图4.1(b)为“沙蚤”机器人起跳的状态。战场上的地形往往复杂多变,面对许多山坡或障碍物,实在不值得美国大兵们赌上命去翻越。在这个时候选择机器人勘察就是一个非常好的办法。沙蚤机器人作为一款遥控侦察机器人就是为此而存在,该机器人呈鞋盒状,重约4.5kg,通常采用4 轮行驶,但也能垂直跳跃,跳跃高度达10m,能独立越过壕沟和障碍。该车装备了操作控制系统和1 部摄像机,能够通过掌上电脑或笔记本电脑进行控制。
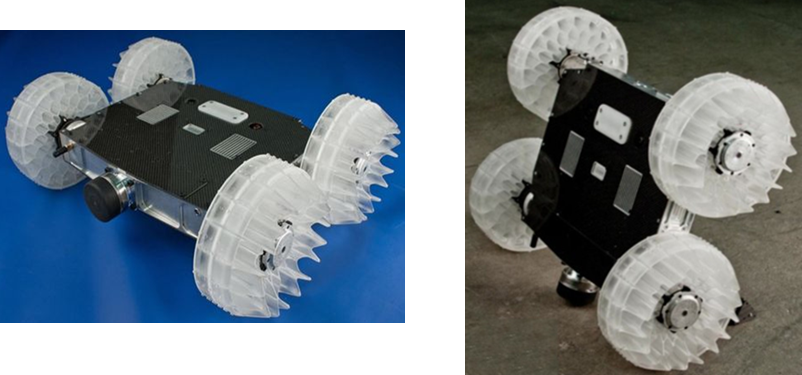
图4.1(a)行驶状态 图4.1(b)起跳状态
图4.1 沙蚤机器人
1、速度雅克比矩阵
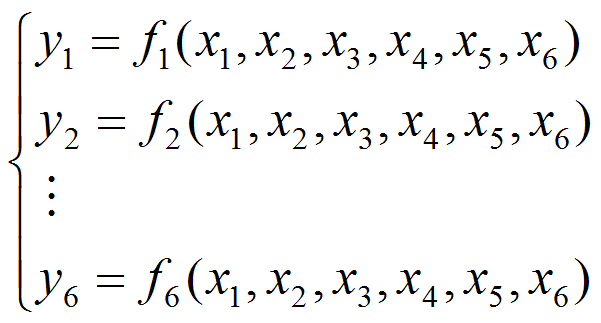
数学上雅可比矩阵(Jacobian matrix)是一个多元函数的偏导矩阵。假设有六个函数,每个函数有六个变量,即:
可写成:
Y=F(X)
将其进行微分,得:
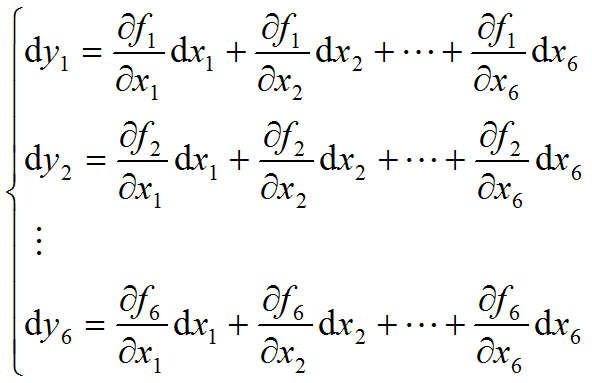
也可简写成:
其中: (6×6)矩阵∂ F/∂ X 叫做雅可比矩阵。
在工业机器人速度分析和以后的静力学分析中都将遇到类似的矩阵,我们称之为工业机器人雅可比矩阵,或简称雅可比。一般用符号J表示。
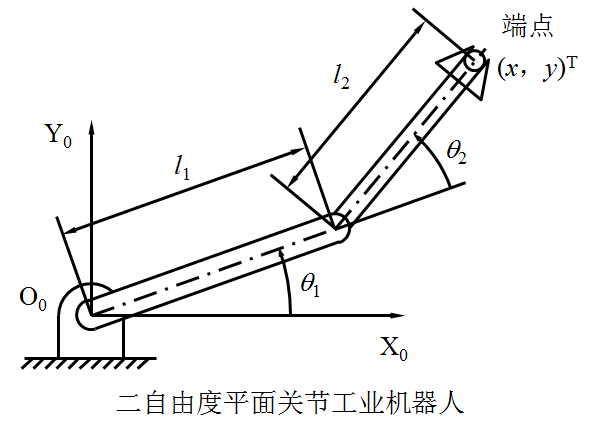
例: 下图所示为二自由度平面关节型工业机器人(2R工业机器人),其端点位置x,y与关节变量θ1、θ2的关系为:
x = L1cosθ1+ L2cos(θ1+θ2)
y = L1sinθ1+ L2sin(θ1+θ2)
将其写成矩阵形式为:
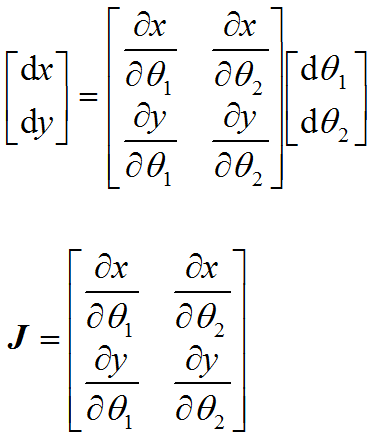
上式可简写为:
dX=Jdθ
我们将J称为二自由度平面关节型工业机器人的速度雅可比,它反映了关节空间微小运动dθ与手部作业空间微小位移dX之间的关系。
注意:dX此时表示微小线位移。
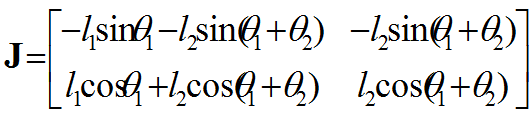
若对雅可比矩阵进行运算,则2R工业机器人的雅可比写为:

从J中元素的组成可见,J阵的值是θ1及θ2的函数。
广义关节变量q=[q1 q2 … qn]T
转动关节:qi=θi,移动关节:qi=di
dq=[dq1 dq2 … dqn]T反映了关节空间的微小运动。
手部在操作空间的运动参数用X表示,它是关节变量的函数,即X=X(q),并且是一个6维列矢量。
dX反映了操作空间的微小运动,它由工业机器人手部微小线位移和微小角位移(微小转动)组成。
参照前面的式子可写出类似的方程式,即:
dX=J(q)dq
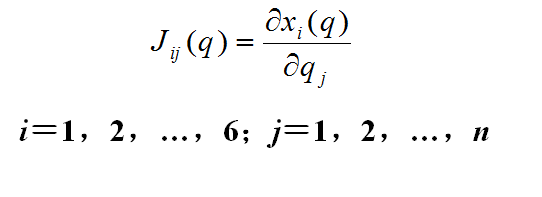
式中J(q)是6×n的偏导数矩阵,称为n自由度工业机器人速度雅可比矩阵。它反映了关节空间微小运动dq与手部作业空间微小运动dX之间的关系。它的第i行第j列元素为:
2、工业机器人速度分析
对式dX=J(q)dq左、右两边各除以dt,得:
即:
算例所示二自由度平面关节型工业机器人手部的速度为:
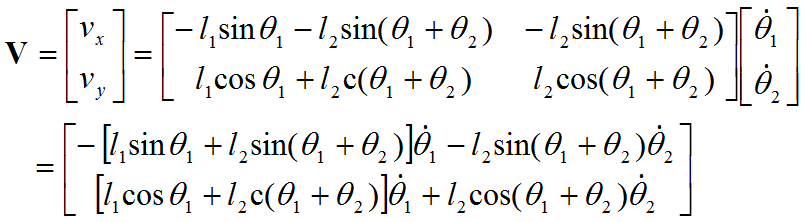
假如θ1及θ2是时间的函数,θ1=f1(t),θ2=f2(t),则可由此式求出手部的瞬时速度V=f(t) 。
若令J1、J2分别为雅可比的第一列矢量和第二列矢量,则有:
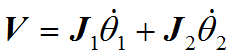
式中右边第一项表示仅由第一个关节运动引起的端点速度;右边第二项表示仅由第二个关节运动引起的端点速度;总的端点速度为这两个速度矢量的合成。
工业机器人速度雅可比的每一列表示其它关节不动而某一关节运动产生的端点速度。
反之,假如给定工业机器人手部速度,可由式
解出相应的关节速度,即:
式中:称为工业机器人逆速度雅可比。
上式是一个很重要的关系式。例如,当希望工业机器人手部在空间按规定的速度进行作业,那么用上式可以计算出沿路径上每一瞬时相应的关节速度。一般来说,求是比较困难的,有时还会出现奇异解,就无法解算关节速度。
(1)关于雅可比矩阵奇异的讨论
通常出现奇异解的情况有下面两种:
1) 工作域边界上奇异。当臂全部伸展开或全部折回而使手部处于工作域的边界上或边界附近时,出现奇异,这时工业机器人相应的形位叫做奇异形位。
2) 工作域内部奇异。奇异也可以是由两个或更多个关节轴线重合所引起的。
当工业机器人处在奇异形位时,就会产生退化现象,丧失一个或更多自由度。这意味着在空间某个方向(或子域)上,不管工业机器人关节速度怎样选择,手部也不可能实现移动。
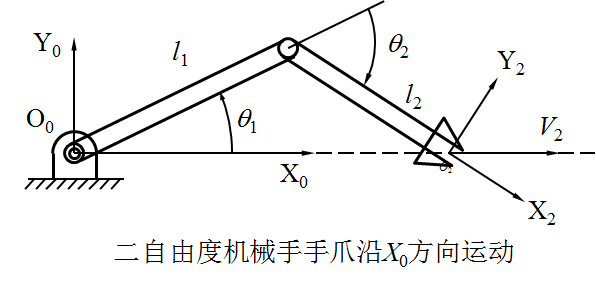
如下图所示二自由度平面关节型机械手。手部某瞬时沿固定坐标系X0轴正向以1.0m/s速度移动,杆长为l1=l2=0.5m。假设该瞬时θ1=30°,θ1=-60°。求相应瞬时的关节速度。
解:
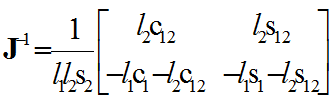
由前面推导知,二自由度机械手的速度雅可比为:
因此,逆速度雅可比为:
已知端点速度为:
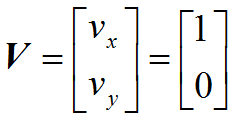
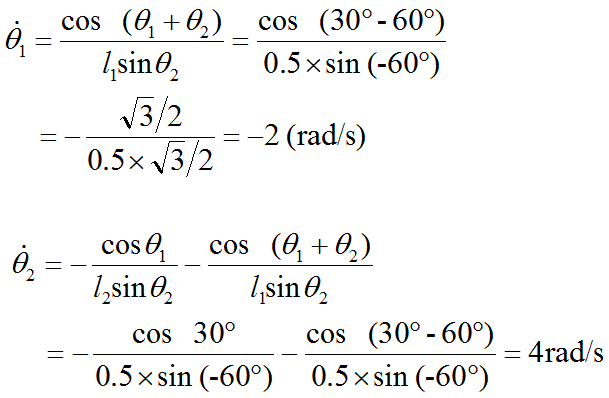
因此,由上式可得:

因此,可得:
奇异讨论
从雅可比的逆矩阵知,当l1l2s2=0时无解。因为l1≠0,l2≠0,所以,在θ2=0或°θ2=180°时,二自由度工业机器人逆速度雅可比J-1奇异。这时,该工业机器人二臂完全伸直,或完全折回,即两杆重合,工业机器人处于奇异形位。在这种奇异形位下,手部正好处在工作域的边界上,该瞬时手部只能沿着一个方向(即与臂垂直的方向)运动,不能沿其它方向运动,退化了一个自由度。
(2)六自由度机器人速度雅可比J
在三维空间中作业的六自由度工业机器人,其速度雅可比J是一个6×6矩阵,q和V分别是6×1列阵,即:
V(6x1)=J(q)(6x6) ̇q(6x1)
手部速度矢量V是由3×1线速度矢量和3×1角速度矢量组合而成的6维列矢量。
关节速度矢量是由6个关节速度组合而成的6维列矢量。
雅可比矩阵J的前三行代表手部线速度与关节速度的传递比;后三行代表手部角速度与关节速度的传递比。而雅可比矩阵J的第i列则代表第i个关节速度对手部线速度和角速度的传递比。

