
机器人运动学的重点是研究手部的位姿和运动,而手部位姿是与机器人各杆件的尺寸、运动副类型及杆间的相互关系直接相关联的。因此在研究手部相对于机座的几何关系时,首先必须分析两相邻杆件的相互关系,即建立杆件坐标系。
机器人的各连杆是通过关节连接在一起的,关节有移动副与转动副两种。一般按从基座到末端执行器的顺序,由低到高依次为各关节和各连杆编号,如图3.20所示。基座的编号为连杆0,与基座相连的连杆编号为连杆1,依次类推。基座与连杆1 的关节编号为关节1,连杆1与连杆2的连接关节编号为2,依次类推。
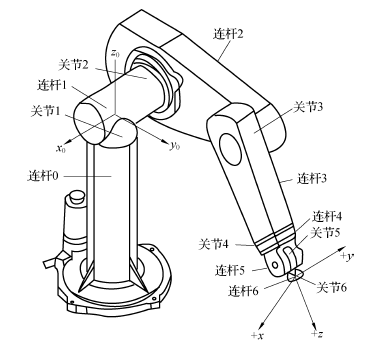
图3.20 连杆和关节的编号
1、工业机器人连杆参数
(1)连杆的几何参数
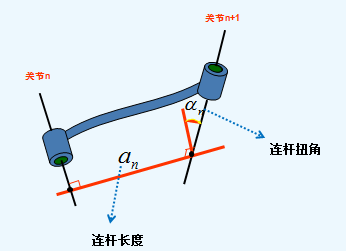
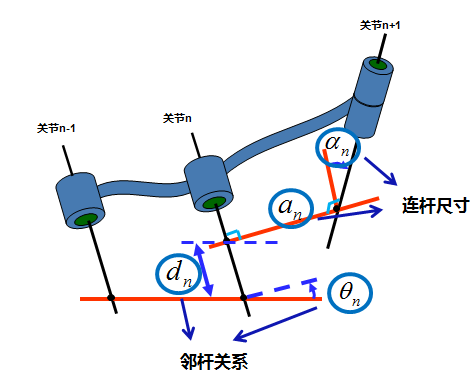
如图3.21所示,连杆两端有关节n和n+1。该连杆尺寸可以用两个量来描述:一个是两个关节轴线沿公垂线的距离,称为连杆长度;另一个是垂直于
的平面内两个轴线的夹角
,称为连杆扭角。这两个参数为连杆的尺寸参数。
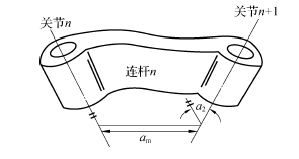
图3.21 连杆尺寸参数及
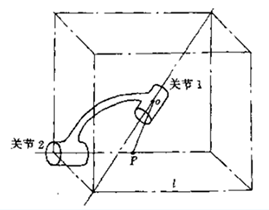
例 下图为XHK5140换刀机械手的连杆,关节1的轴线与正方体的对角线重合,关节2的轴线与正方体的一个棱重合,正方体的边长为L,求连杆长度和扭角。
解:
(2)连杆的关系参数
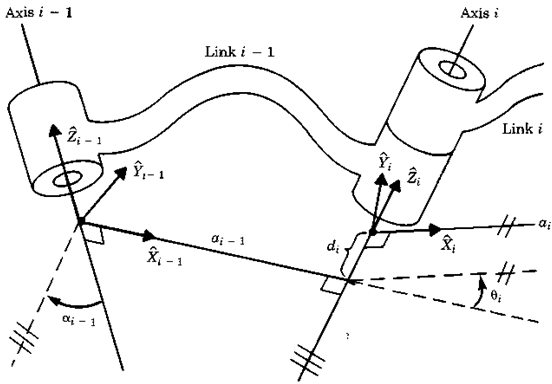
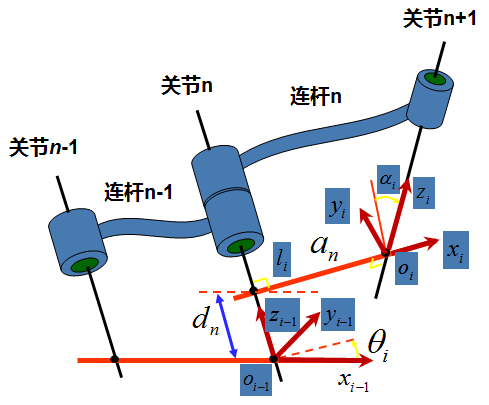
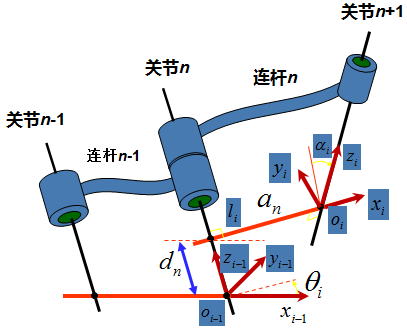
考虑连杆n与相邻连杆n-1的关系,若它们通过关节相连,如图3.22所示,其相对位置可用两个参数以和以来确定,其中是沿关节n轴线两个公垂线的距离。
是垂直于关节n轴线的平面内两个公垂线的夹角。
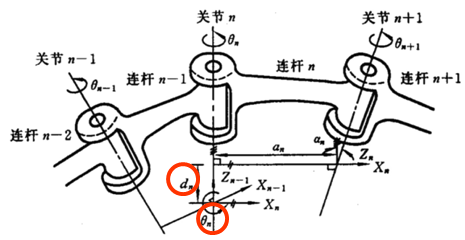
图3.22 连杆关系参数及
连杆中的首尾连杆
对于运动链中的末端连杆,其参数习惯设为0,即=
=0.0,
=
=0.0.
从关节2到关节n的连杆偏距和关节角
是根据前面的规定进行定义.
关节1(或n)如果为转动关节,则的零位可以任意选取,并规定
=0.0;
关节1 (或n)如果为移动关节,则的零位可以任意选取,并规定
=0.0;
连杆参数
对于转动关节,为关节变量,其他三个连杆固定不变;
对于移动关节,为关节变量,其他三个连杆固定不变;
这种用连杆参数描述机构运动关系的规则称为Denavit-Hartenberg参数,所以对于一个6关节机器人,需要用18个参数就可以完全描述这些固定的运动学参数,可用6组(,
,
) 表示。
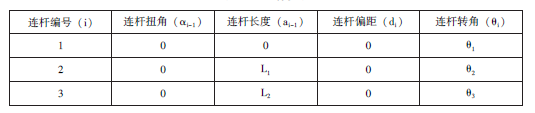
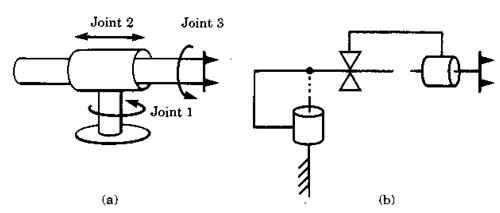
例 写出下面3R机器人的连杆参数,如图3.23所示。
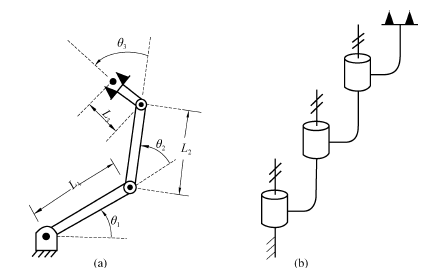
图3.23 3R机器人
(a) 机器人主视图; (b) 机器人侧视图
解: 根据机器人连杆参数的定义,图中的3R机器人连杆参数如下表所示。
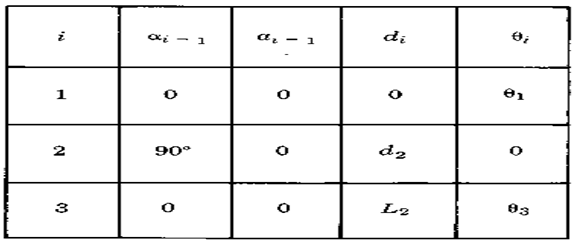
例题:写出下面机器人的连杆参数
解:
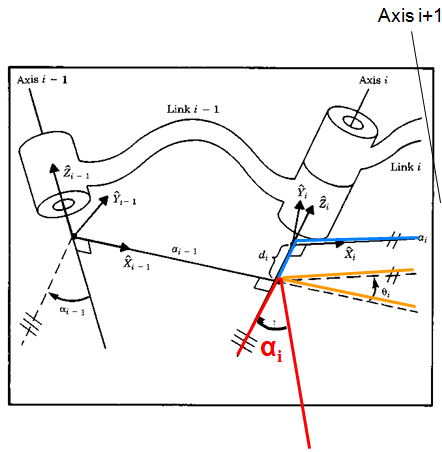
2.连杆坐标系的建立
为了描述每个连杆和相邻连杆之间的相对位置关系,需要在每个连杆上定义一个固连坐标系。
(1)连杆中的中间连杆
规定:坐标系{i}的Z轴称为,与关节轴i重合;坐标系{i}的原点位于公垂线ai与关节轴i的交点处。
轴沿ai方向由关节i指向关节i+1;(若:
=0,则
垂直于
和
所在的平面;按照右手定则绕
轴的转角定义为
,由于
轴的符号有两种,则转角的符号也有两种)
轴由右手定则确定。
(2)连杆中的首尾连杆
坐标系{0} 通常规定:
轴沿着关节轴1的方向,当坐标系1的关节变量为0时,设定参考坐标系{0}与{1}重合。且
=0,
=0,当关节1为转动关节,
=0;当关节1为移动关节,
=0.0
坐标系{n} 通常规定:
对于转动关节 n,设定=0.0,此时
和
轴的方向相同,选取坐标系{n} 的原点位置,使之满足
=0;
对于移动关节 n,设定Xn轴的方向使之满足=0.0,当
=0时,选取坐标系{n} 的原点位于
轴与关节轴n的交点位置。
(3)在连杆坐标系中对连杆参数的归纳
连杆长度 =沿
轴,从
移动到
的距离;
连杆扭角 =绕
轴,从
旋转到
的角度;
连杆偏距 =沿
轴,从
移动到
的距离;
连杆转角 =绕
轴,从
旋转到
的角度;
通常规定>0,其余可正可负。按照上述规定的坐标系不是唯一的,
的指向有两种选择;如果关节轴相交,
轴的指向也有两种选择。当相邻两轴平行时,坐标系原点可以任意选择,当关节为移动关节时,坐标系的选取一定具有任意性。
(4)建立连杆坐标系的步骤
1) 确定关节轴,并画出轴的延长线。
2) 找出关节轴i和i+1的公垂线或交点,作为坐标系i的原点。
3) 规定Zi的指向是沿着第i个关节轴。
4) 规定轴得指向是沿着轴i和i+1的公垂线的方向,如果关节轴i和i+1相交,则
轴垂直于关节轴i和i+1所在的平面。
5) 轴的方向由右手定则确定。
当第一个关节变量为0时,规定坐标系{0}和{1} 重合,对于坐标系{N},尽量选择坐标系使得连杆参数为0。
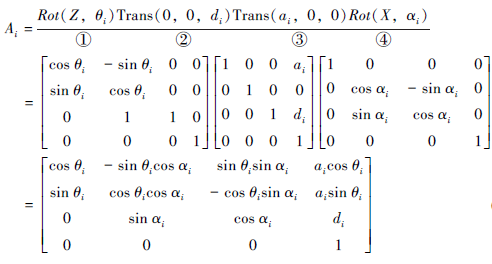
3.连杆坐标系之间的变换矩阵
建立了各连杆坐标系后,n-1系与n系间的变换关系可以用坐标系的平移、旋转来实现。从n-1系到n系的变换,可先令以n-1系绕轴旋转
角,再沿
轴平移
,然后沿
轴平移
,最后绕
轴旋转
角,使得n-1系n系重合。
用一个变换矩阵来综合表示上述四次变换时应注意到坐标系在每次旋转或平移后发生了变动,后一次变换都是相对于动系进行的,因此在运算中变换算子应该右乘。
于是连杆i的的坐标系相对于连杆i-1坐标系的齐次变换矩阵为
实际上,很多机器人在设计时,常常使某些连杆参数取特别值,如使=0或90°,也有使
=0或
=0,从而简化变换矩阵
的计算。

