
1、多级坐标变换
工业机器人都具有2个以上的自由度,从末端操作器把持中心的坐标系到固定坐标系的变换要经过多级坐标变换,其变换方程的建立方法如下。
设有一具有n个自由度的机器人,点为末端操作器把持中心动坐标系的原点,点P为末端操作器上的任意一点。点P相对于固定坐标系{O0:x0,y0,z0}的坐标为P(x,y,z),而相对于动坐标系{On:xn,yn,zn}的坐标为P(xn,yn,zn),已知P(xn,yn,zn),要求P(x,y,z)的表达式。
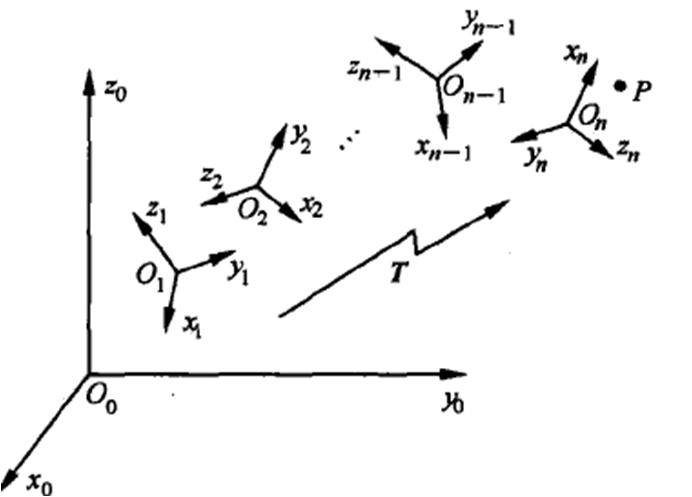
多级坐标变换
很显然,从坐标系到坐标系
经过了n级的逐次坐标变换,且每次都是相对于动坐标系进行的。任一个相邻两级之间的坐标变换矩阵
从
到
之间的坐标变化矩阵可表示为
则其次坐标变换方程式可以表示为
式中: 。
。
2.多种坐标系的变换
为了描述机器人的运动,以便于编程控制,常常需要定义多种坐标系。几种常用的坐标系有:基座(固定)坐标系{B}、工作台坐标系{S}、手部坐标系{H}、工具坐标系{T}、工件坐标系{G}及通用坐标系{U},如图3.18所示。各坐标系之间的位姿关系可以用相应的齐次变换来描述。例如:
描述工作站坐标系{S} 相对于基座坐标系{B} 的位姿;
描述工件坐标系{G} 相对于工作台坐标系{S} 的位姿;
描述腕部坐标系{W} 相对于基座坐标系{B} 的位姿;
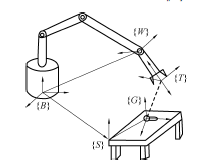
图3.18 变换方程
对物体进行操作时,工具坐标系{T} 相对工件坐标系{G} 的位姿直接影响操纵效果。它是机器人控制和规划的目标。实际上,它与其他变换(位姿) 之间的关系类似于空间尺寸链,
则是封闭环。如图3.19所示,工具坐标系{T} 相对于基座坐标系{B} 的描述可用两种变换矩阵的乘积来表示:
令上面两式相等,则得变换方程
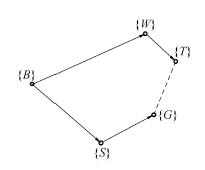
图3.19 空间尺寸链
上式变换方程中的任一变换矩阵都可用其余的变换矩阵来表示。例如,为了对目标物进行有效操作,工具坐标系{T} 相对于目标坐标系的位姿是预先规定的,需要改变
以达到这一目的,根据上式变换方程可以立即求出

