
刚体的运动是由转动和平移组成的。为了能用同一矩阵表示转动和平移,有必要引入(4×4)的齐次坐标变换矩阵。
1、平移的齐次变换
首先,我们介绍点在空间直角坐标系中的平移。如下图所示,空间某一点A,坐标为(x,y,z)当它平移至A′点后,坐标为(x′,y,′z′)。
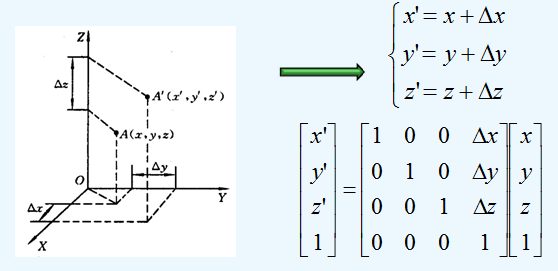
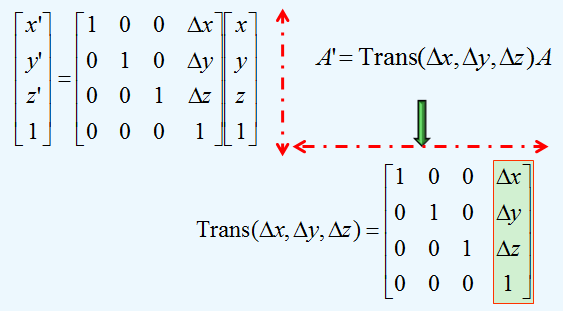
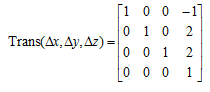
其中第四列元素Δx,Δy,Δz分别表示沿坐标轴X,Y,Z的移动量。若算子左乘,表示坐标变换是相对固定坐标系进行的:假如相对动坐标系进行坐标变换,则算子应该右乘。平移的齐次变换公式同样适用于坐标系、物体等的变换。
例 图3.13所示的坐标系与物体的平移变换给出了以下情况:动坐标系{A}相对于固定坐标系的X0、Y0、Z0轴作(一1,2,2)平移后到{A'};动坐标系{A}相对于自身坐标系(即动系)的X、Y、Z轴分别作(一1,2,2)平移到{A''};写出坐标系{A'} {A''}的矩阵表达式。
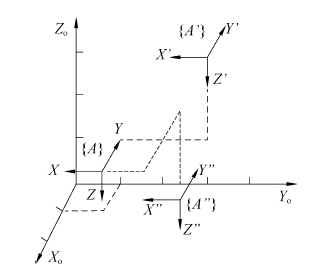
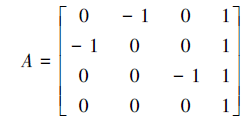
图3.13 坐标系
解 :
动坐标系{A}的两个平移坐标变换算子均为:
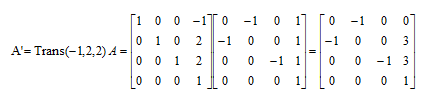
{A'}坐标系是动系{A}沿固定坐标系作平移变换得来的,因此算子左乘{A'}的矩阵表达式为:
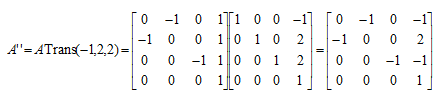
{A″}坐标系是动系{A}沿自身坐标系作平移变换得来的,因此算子右乘,{A″}的矩阵表达式为:
2、旋转的齐次变换
如图3.14所示,空间某一点A,坐标为(x,y,z),当它绕z轴旋转θ角后至A′点,坐标为(z′y′z′),A′点和A点的坐标关系:
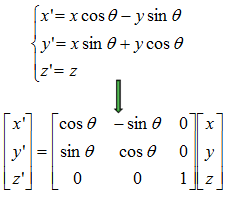
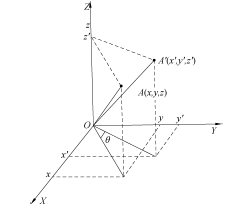
图3.14 点的旋转变换
A'点和A点的齐次坐标分别为[z' y' z' 1]T和[x y z 1]T,因此A点的旋转齐次变换过程为:
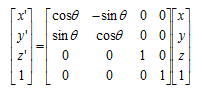
也可简写为

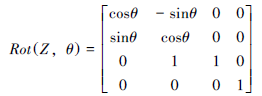
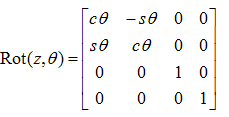
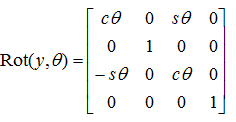
式中,Rot(Z,θ) 表示齐次坐标变换时绕Z轴的旋转算子,算子左乘表示相对于固定坐标系进行变换。绕Z轴的旋转算子可表示为
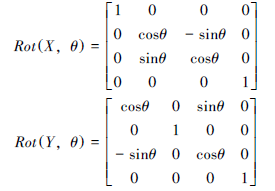
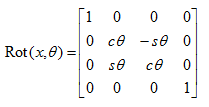
同理,可写出绕X轴旋转的算子和绕Y轴旋转的算子
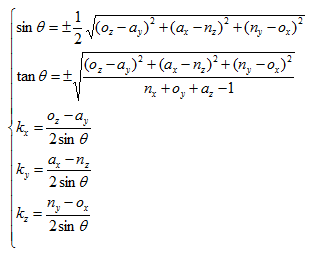
点A绕任意过原点的单位矢量k旋转θ角的情况,分别为k矢量在固定参考系坐标轴x、y、z上的三个分量,且:
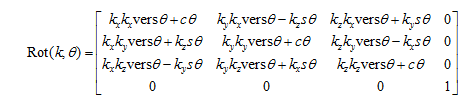
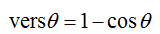
其中:
当时,即
时
当,即
时
当,即
时
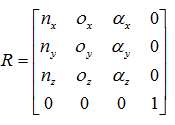
若给出某个旋转齐次变换矩阵:
与平移变换一样,旋转变换算子一般旋转变换算子不仅仅适用于点的旋转变换,而且也适用于坐标系的旋转变换计算。若相对于固定坐标系进行变换,则算子左乘;若相对于动坐标系进行变换,则算子右乘。
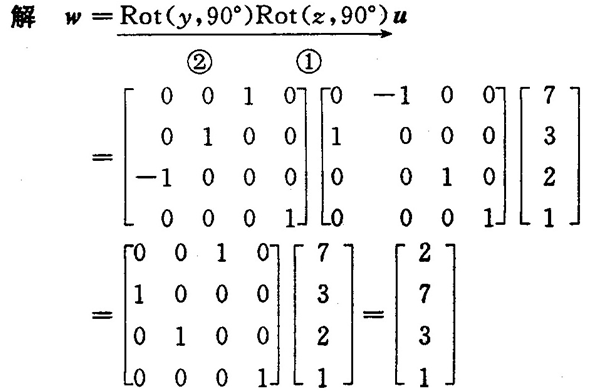
例 已知坐标系中点U的齐次坐标u=[7 3 2 1]T,将此点绕Z轴旋转90度,再绕y轴旋转90度,如图3.15所示,求旋转变换后所得的点W。
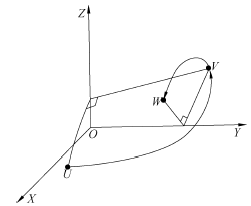
图3.15 两次旋转变换
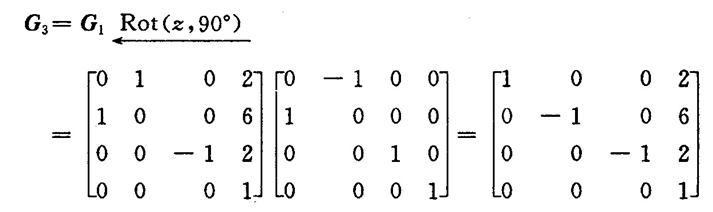
例 图3.16所示单臂操作手,并且手腕也具有一个旋转自由度。手部起始位姿矩阵已知。
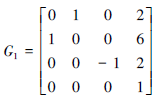
若手臂绕轴旋转
,则手部到达
;若手臂不动,仅手部绕手腕
轴旋转
,则手部到达
。写出手部坐标系{
}及{
}的矩阵表达式。
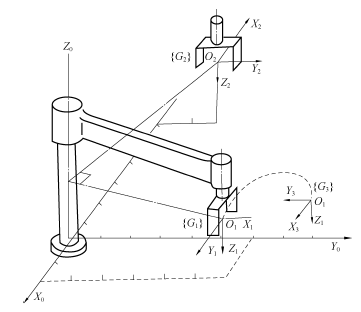
图3.16 手臂转动和手腕转动
解:
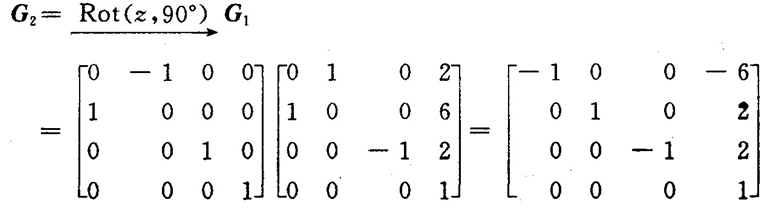
手臂绕定轴转动是相对于固定坐标系作旋转变换:
手部绕手腕轴旋转是相对于动坐标系作旋转变换:
3.平移加旋转的齐次变换
平移交换和旋转变换可以组合在一个齐次变换中,称为复合变换。
例: 如图3.17所示,坐标系中点U,位置矢量U = 将此点绕Z轴旋转90°再绕Y轴旋转90°再作4i-3j+7k的平移,求变换后得到的点E。
由于旋转变换和平移变换都是相对固定坐标系进行的变换,则算子左乘。因此有:
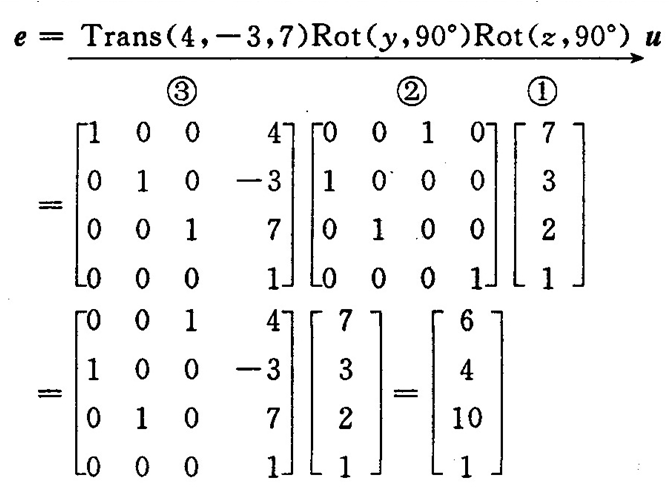
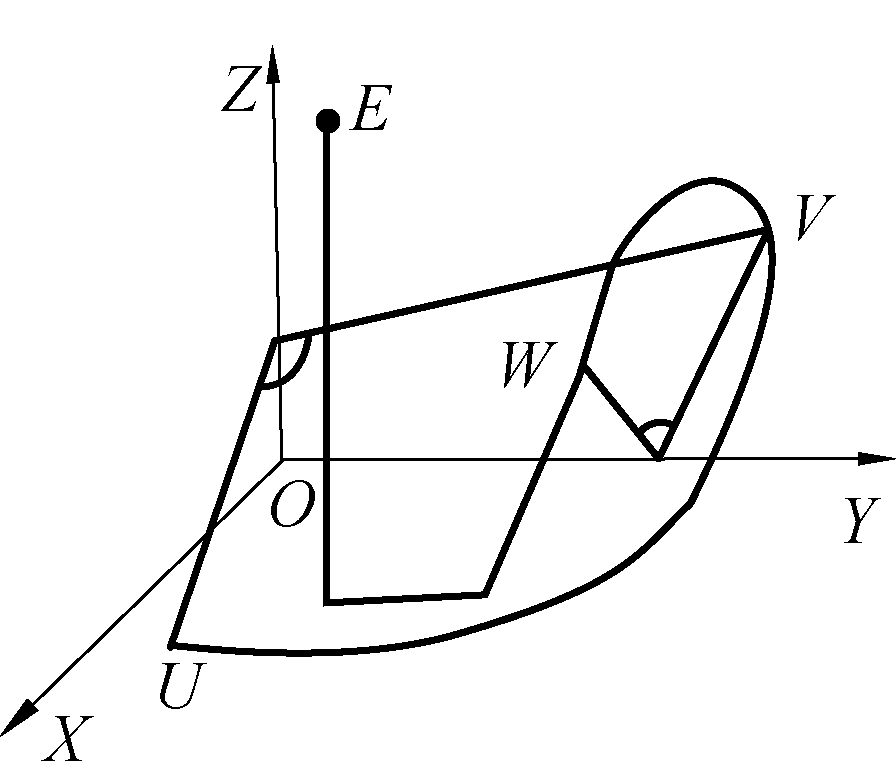
图3.17 两次旋转变换,一次平移变换
平移加旋转的齐次变换也称为复合齐次变换或一般齐次变换,它并不限定平移变换或旋转变换的次数或先后次序。在运算时规则同前,凡相对固定坐标系进行变换则算子左乘,凡相对动坐标系进行变换则算子右乘。上面以点为例作平移和旋转的一般齐次变换,当然同样适用于坐标系的一般齐次变换。

