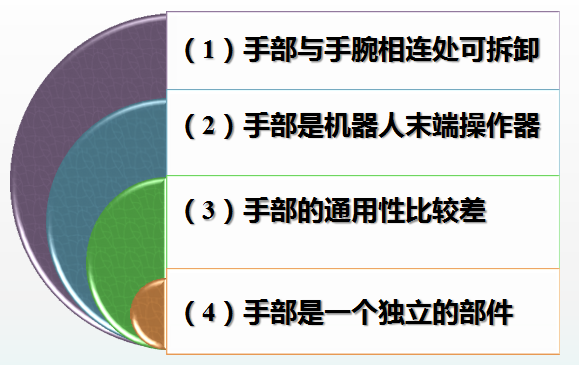
1、机器人手部的特点
2. 手部的分类
(1)按用途
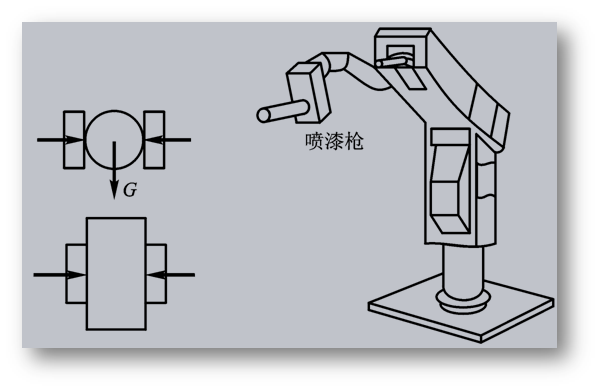
平面钳爪夹持圆柱零件;喷枪
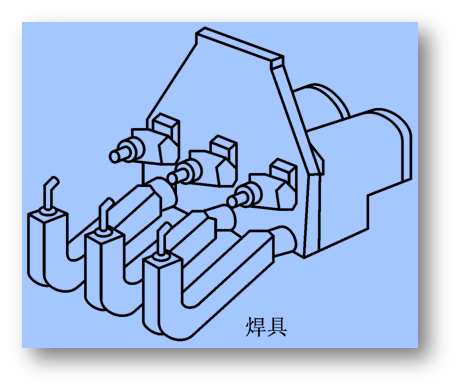
专用工具: 焊具
(2)按夹持原理
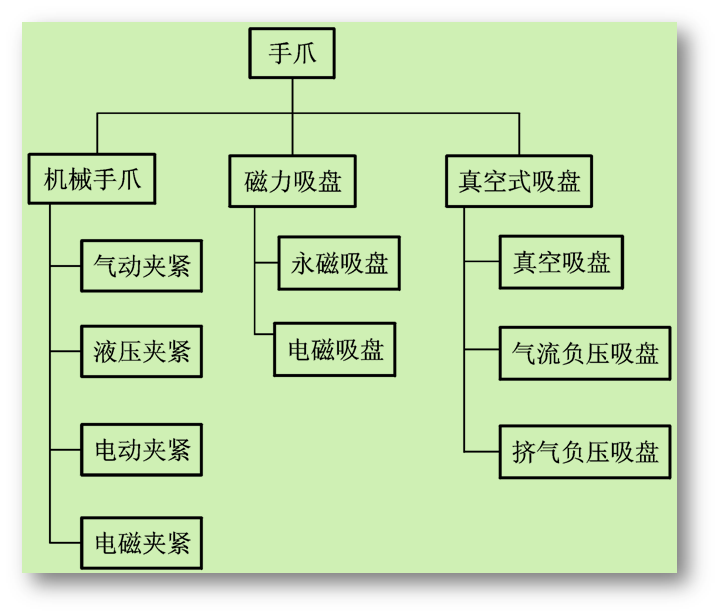
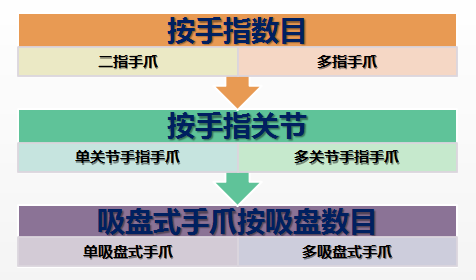
(3)按手指或吸盘数目
(4)按智能化
1)普通式(无传感器)
2)智能式(有传感器)
3. 手爪设计和选用的要求

4. 典型的手爪结构
(1)夹钳式取料手
夹钳式手部与人手相似, 是工业机器人广为应用的一种手部形式。它一般由手指(手爪)和驱动机构、传动机构及连接与支承元件组成,能通过手爪的开闭动作实现对物体的夹持,其结构如图2.50所示。
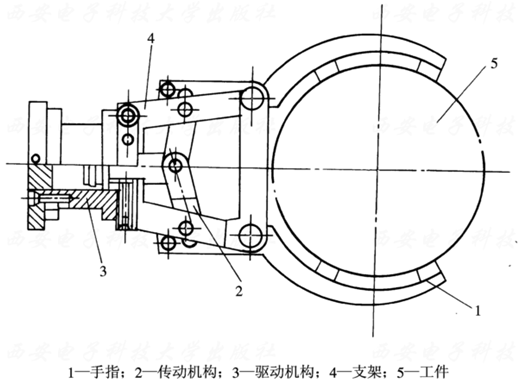
图2.50 夹钳式手部的组成
1)手指
手指是直接与工件接触的部件。手部松开和夹紧工件, 就是通过手指的张开与闭合来实现的。机器人的手部一般有两个手指, 也有三个或多个手指,其结构形式常取决于被夹持工件的形状和特性。
指端的形状通常有两类: V型指和平面指。如图2.51所示的三种V型指的形状, 用于夹持圆柱形工件。
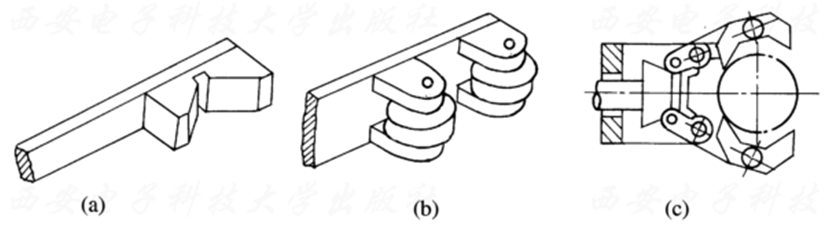
图2.51 V型手指指端形状
(a) 固定V型; (b) 滚柱V型; (c) 自定位式V型
如图2.52所示的平面指为夹钳式手的平面指指端,一般用于夹持方形工件(具有两个平行平面), 板形或细小棒料。另外,尖指和薄、长指一般用于夹持小型或柔性工件。 其中, 薄指一般用于夹持位于狭窄工作场地的细小工件, 以避免和周围障碍物相碰;长指一般用于夹持炽热的工件, 以免热辐射对手部传动机构的影响。

图2.52 夹钳式手的平面指指端
(a)平面指 (b)尖指 (c)特型指
指面的形状常有光滑指面、齿形指面和柔性指面等。光滑指面平整光滑, 用来夹持已加工表面, 避免已加工表面受损。 齿形指面的指面刻有齿纹, 可增加夹持工件的磨擦力,以确保夹紧牢靠, 多用来夹持表面粗糙的毛坯或半成品。 柔性指面内镶橡胶、泡沫、石棉等物,有增加磨擦力、保护工件表面、 隔热等作用, 一般用于夹持已加工表面、炽热件,也适于夹持薄壁件和脆性工件。
2)传动机构
传动机构是向手指传递运动和动力, 以实现夹紧和松开动作的机构。该机构根据手指开合的动作特点分为回转型和平移型。回转型又分为一支点回转和多支点回转。根据手爪夹紧是摆动还是平动,又可分为摆动回转型和平动回转型。
①回转型传动机构
夹钳式手部中较多的是回转型手部, 其手指就是一对杠杆,一般再同斜楔、滑槽、连杆、齿轮、蜗轮蜗杆或螺杆等机构组成复合式杠杆传动机构, 用以改变传动比和运动方向等。图2.53所示为单作用斜楔式手部结构简图。
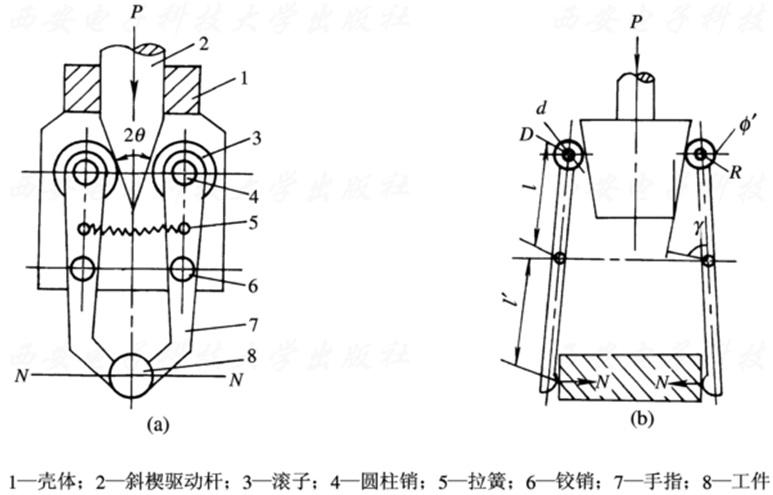
图2.53 斜楔杠杆式手部
上图(a)所示为单作用斜楔式回转型手部结构简图。斜楔向下运动,克服弹簧拉力,使杠杆手指装着滚子的一端向外撑开,从而夹紧工件; 斜楔向上移动,则在弹簧拉力作下使手指松开。手指与斜楔通过滚子接触可以减少摩擦力, 提高机械效率,有时为了简化,也可让手指与斜楔直接接触。也有如图(b)所示的结构。
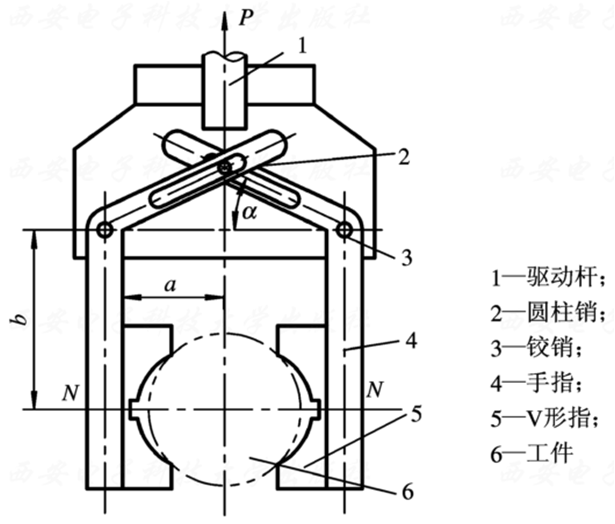
图2.54 滑槽式杠杆回转型手部
图2.54所示为滑槽式杠杆回转型手部简图,杠杆形手指4的一端装有V形指5,另一端则开有长滑槽。驱动杆1上的圆柱销2套在滑槽内,当驱动连杆同圆柱销一起作往复运动时,即可拨动两个手指各绕其支点(铰销3)作相对回转运动, 从而实现手指的夹紧与松开动作。
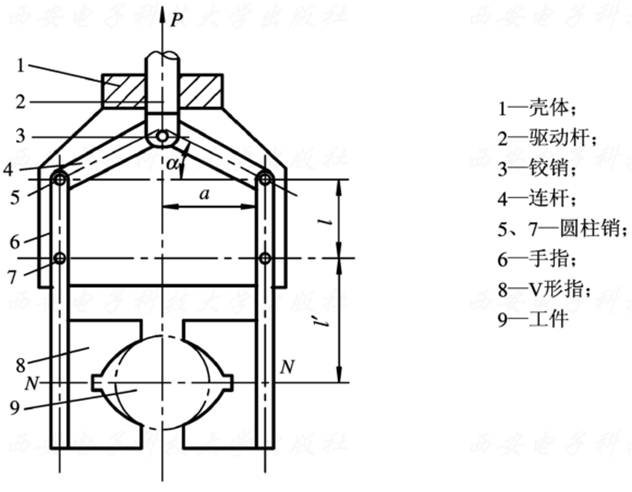
图2.55 双支点连杆杠杆式手部
图2.55所示为双支点连杆杠杆式手部简图。驱动杆2末端与连杆4由铰销3铰接, 当驱动杆2作直线往复运动时,则通过连杆推动两杆手指各绕其支点作回转运动,从而使手指松开或闭合。
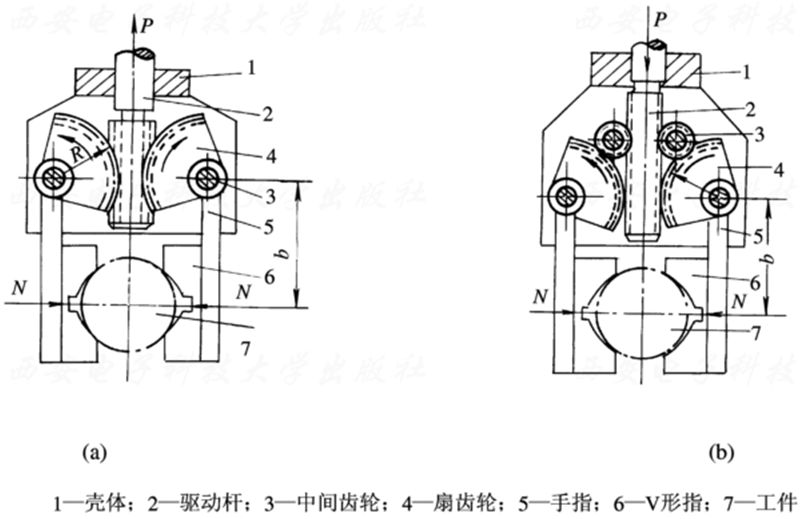
图2.56 齿条齿轮杠杆式手部
图2.56所示为齿轮齿条直接传动的齿轮杠杆式手部的结构。 驱动杆2末端制成双面齿条,与扇齿轮4相啮合, 而扇齿轮4与手指5固连在一起, 可绕支点回转。驱动力推动齿条作直线往复运动, 即可带动扇齿轮回转, 从而使手指松开或闭合。
②平移型传动机构
平移型夹钳式手部是通过手指的指面作直线往复运动或平面移动来实现张开或闭合动作的, 常用于夹持具有平行平面的工件(如冰箱等)。 其结构较复杂,不如回转型手部应用广泛。
a)直线往复型移动机构
实现直线往复移动的机构很多, 常用的斜楔传动、齿条传动、螺旋传动等均可应用于手部结构,如图2.57所示。它们既可是双指型的,也可是三指(或多指)型的;既可自动定心,也可非自动定心。
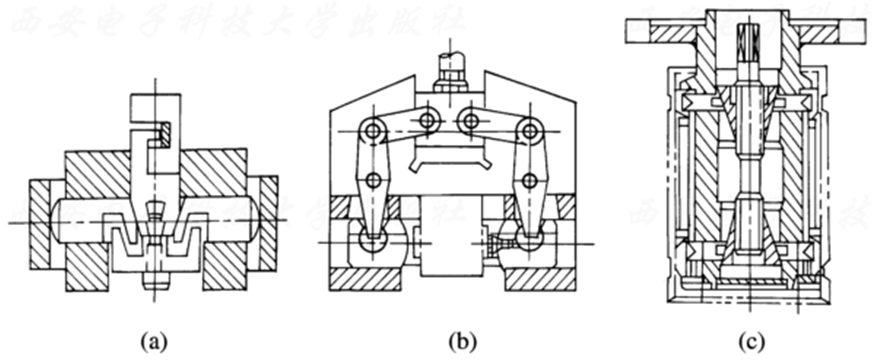
图2.57 直线平移型手部
(a)为斜楔平移机构 (b)为连杆杠杆平移结构 (c)为螺旋斜楔平移结构
b)平面平行移动机构
图2.58所示为几种平面平行平移型夹钳式手部的简图。它们的共同点是: 都采用平行四边形的铰链机构——双曲柄铰链四连杆机构,以实现手指平移。其差别在于分别采用齿条齿轮、蜗杆蜗轮、连杆斜滑槽的传动方法。
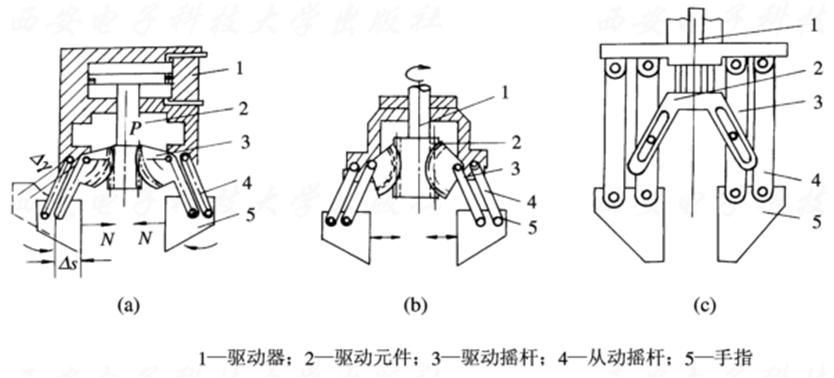
图2.58 四连杆机构平移型手部结构
(2)吸附式取料手
1)气吸附式取料手
气吸附式取料手是利用吸盘内的压力和大气压之间的压力差而工作的。按形成压力差的方法,可分为真空吸附、气流负压气吸、挤压排气负压气吸式等几种。
气吸式取料手与夹钳式取料手相比, 具有结构简单,重量轻, 吸附力分布均匀等优点,对于薄片状物体的搬运更有其优越性(如板材、纸张、玻璃等物体),广泛应用于非金属材料或不可有剩磁的材料的吸附。但要求物体表面较平整光滑,无孔无凹槽。
①真空吸附取料手
图2.59所示为真空吸附取料手的结构原理。其真空的产生是利用真空泵, 真空度较高。主要零件为碟形橡胶吸盘1, 通过固定环2安装在支承杆4上, 支承杆由螺母5固定在基板6上。取料时, 碟形橡胶吸盘与物体表面接触, 橡胶吸盘在边缘既起到密封作用,又起到缓冲作用, 然后真空抽气,吸盘内腔形成真空, 吸取物料。放料时, 管路接通大气, 失去真空, 物体放下。为避免在取、放料时产生撞击, 有的还在支承杆上配有弹簧缓冲。为了更好地适应物体吸附面的倾斜状况,有的在橡胶吸盘背面设计有球铰链。真空吸附取料手有时还用于微小无法抓取的零件, 如图2.60所示。
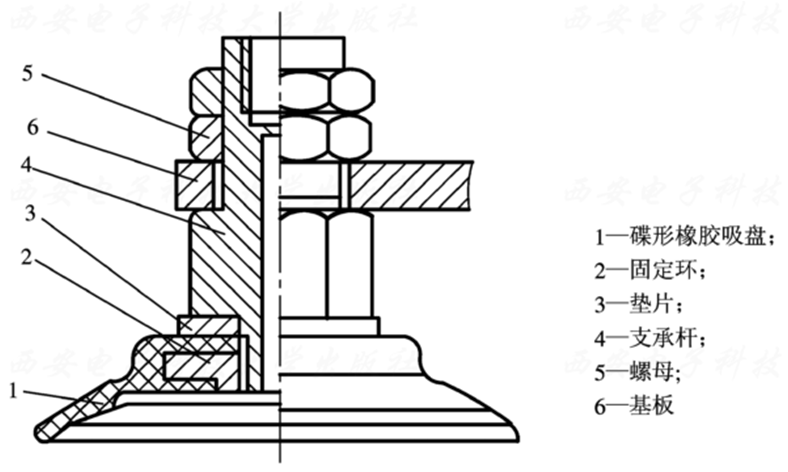
图2.59 真空吸附取料手
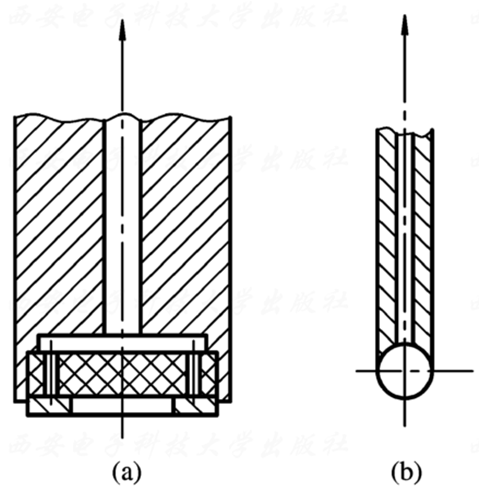
图2.60 微小零件取料手
(a) 垫圈取料手 (b) 钢球取料手
②气流负压吸附取料手
气流负压吸附取料手如图2.61所示。气流负压吸附取料手是利用流体力学的原理, 当需要取物时, 压缩空气高速流经喷嘴5时, 其出口处的气压低于吸盘腔内的气压, 于是腔内的气体被高速气流带走而形成负压, 完成取物动作;当需要释放时, 切断压缩空气即可。这种取料手需要压缩空气,工厂里较易取得,故成本较低。
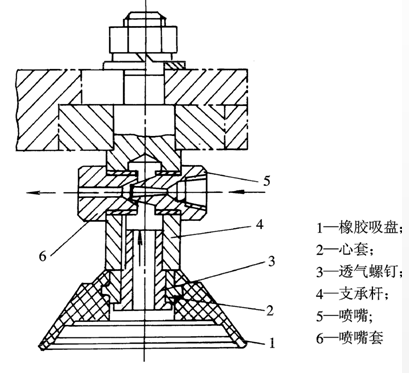
图2.61 气流负压吸附取料手
③挤压排气式取料手
挤压排气式取料手如图2.62所示。其工作原理为: 取料时吸盘压紧物体, 橡胶吸盘变形, 挤出腔内多余的空气,取料手上升, 靠橡胶吸盘的恢复力形成负压, 将物体吸住;释放时,压下拉杆3,使吸盘腔与大气相连通而失去负压。 该取料手结构简单, 但吸附力小, 吸附状态不易长期保持。
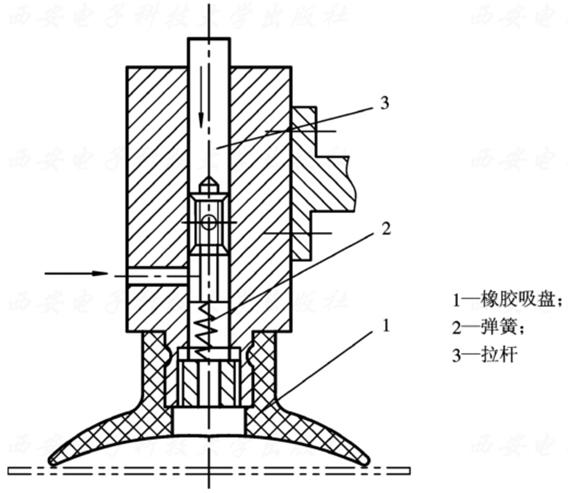
图2.62 挤压排气式取料手
2)磁吸附式取料手
磁吸附式取料手是利用电磁铁通电后产生的电磁吸力取料, 因此只能对铁磁物体起作用;另外,对某些不允许有剩磁的零件要禁止使用。所以, 磁吸附式取料手的使用有一定的局限性,磁力吸附式取料手有电磁吸盘和永磁吸盘两种。
电磁铁工作原理如图2.63所示。当线圈1通电后, 在铁心2内外产生磁场, 磁力线穿过铁心, 空气隙和衔铁3被磁化并形成回路, 衔铁受到电磁吸力F的作用被牢牢吸住。实际使用时, 往往采用如图(b)所示的盘式电磁铁, 衔铁是固定的, 衔铁内用隔磁材料将磁力线切断, 当衔铁接触磁铁物体零件时, 零件被磁化形成磁力线回路,并受到电磁吸力而被吸住。
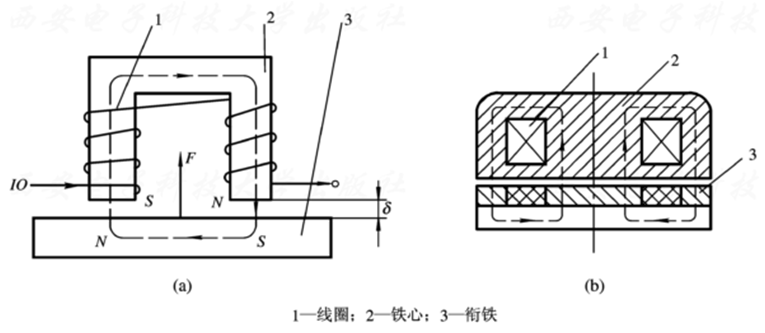
图2.63 电磁铁工作原理
下图所示为盘状磁吸附取料手的结构图。铁心1和磁盘3之间用黄铜焊料焊接并构成隔磁环2,既焊为一体又将铁心和磁盘分隔,这样使铁心1成为内磁极,磁盘3成为外磁极其磁路由壳体6的外圈,经磁盘3、工件和铁心,再到壳体内圈形成闭合回路, 以此吸附工件。铁心、磁盘和壳体均采用8~10号低碳钢制成, 可减少剩磁,并在断电时,不吸或少吸铁屑。盖5为用黄铜或铝板制成的隔磁材料,用以压住线圈11,防止工作过程中线圈的活动。挡圈7、8用以调整铁心和壳体的轴向间隙,即磁路气隙δ,在保证铁心正常转动的情况下,气隙越小越好,气隙越大,则电磁吸力会显著地减小,因此,一般取δ=0.1~0.3 mm。在机器人手臂的孔内可做轴向微量地移动,但不能转动。铁心1和磁盘3一起装在轴承上,用以实现在不停车的情况下自动上下料。
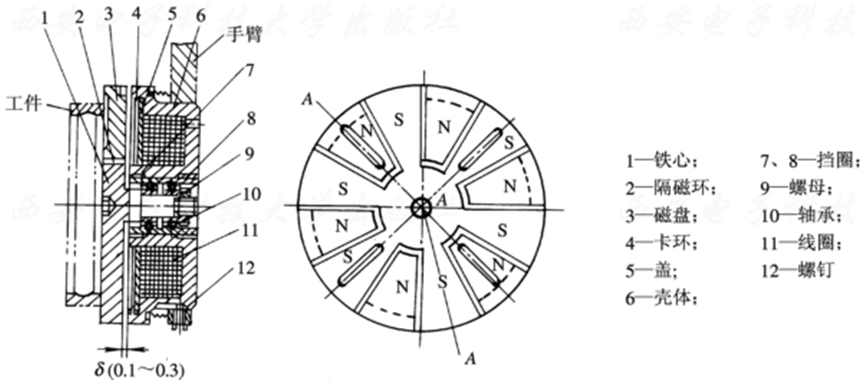
盘状磁吸附取料手结构图
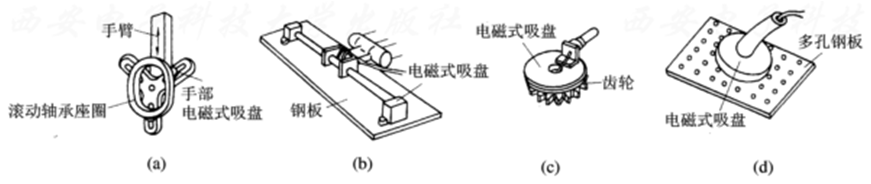
几种电磁式吸盘吸料示意图
(a) 吸附滚动轴承底座的电磁式吸盘; (b) 吸取钢板的电磁式吸盘;
(c) 吸取齿轮用的电磁式吸盘; (d) 吸附多孔钢板用的电磁式吸盘
综合实例
鸡蛋分检包装系统中的机器人
下面以鸡蛋分检包装系统为例,介绍机器人的系统分析方法。
一、 明确机器人的目的和任务:
1.从传送带拾取一个鸡蛋;
2.把蛋置于强光下照射,测定蛋是否透光(有无胚胎生长);
3.根据蛋有无胚胎,把蛋放入废品箱或包装箱内。
举例:
鸡蛋分拣包装机器人基本工作流程如图2.64所示。
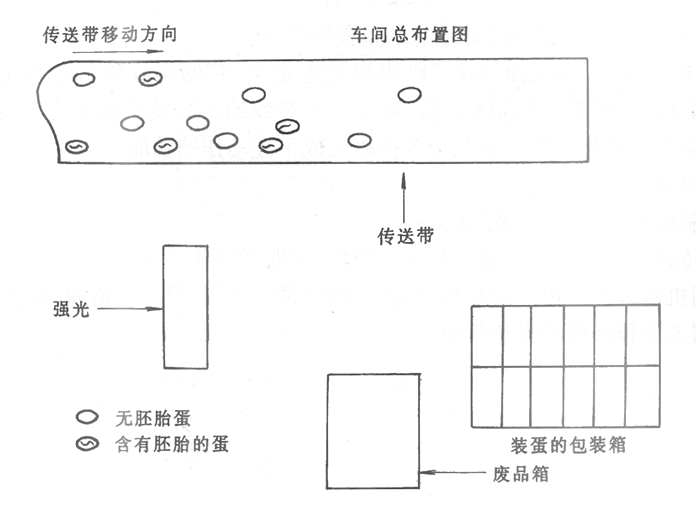
图2.64 基本工作流程
分析机器人所在系统的工作环境:包括工作车间的平面布置,相互间的位置关系等如图2.65所示。
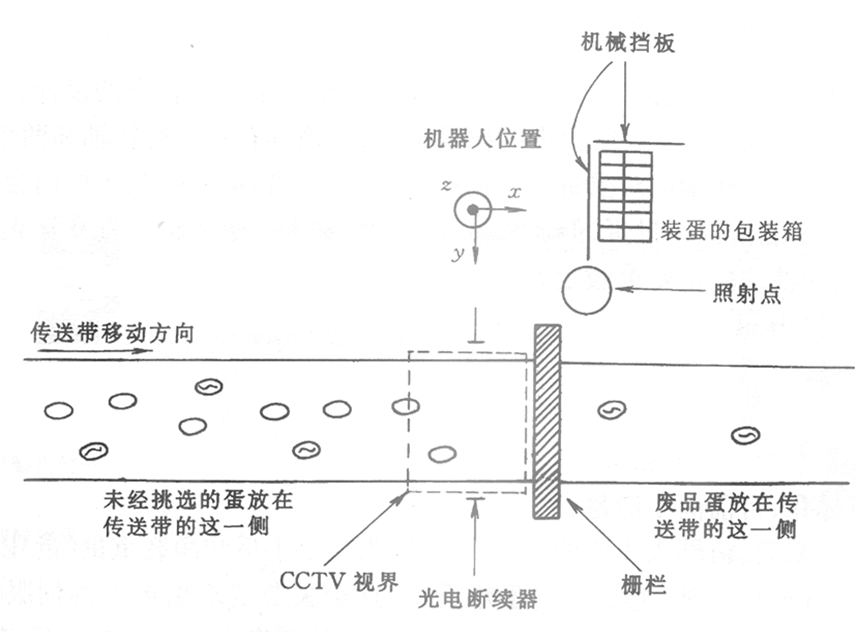
图2.65 机器人所在系统的工作环境
分析系统的工作要求:
1.循环时间≤3.0s
2.每次循环有三种不同的运动:
移动到传送带并拾取一只鸡蛋;
移动到照射位置;
把鸡蛋放入纸箱或废品区。
3.一个循环中需要三次暂停:
闭合手爪0.2s;完成照射0.05s;开启手爪放蛋0.2s
4.每只鸡蛋重量≤85g;手爪重量≤369g
5.位置分辨率最低为1.27mm
确定机器人的自由度及运动范围:
初步分析:机器人满足上面提出的条件,应该具备一个旋转运动和两个直线运动。
仔细分析:还应该有一个附加旋转运动以对蛋进行定向排列。因为当受臂移动和转动时,鸡蛋的取向会发生改变。
确定技术参数为:
伸缩运动:45.7-61.0cm
腰部旋转: ±90°
腕部旋转:360 °
腕部垂直移动:50.8cm
二、技术设计
1.机器人基本参数的确定(1):
自由度的确定:在系统分析时已经确定了。
臂力的确定:
对于专用机器人来说:是针对专门的工作对象来设计的,臂力主要根据被抓取物体的重量确定,取1.5~3.0的安全系数。
对于工业机器人来说:具有一定的通用性,臂力要根据被抓取物体的重量变化来确定。
工作范围的确定:
要根据工艺要求和操作运动的轨迹来确定
1.机器人基本参数的确定(2):
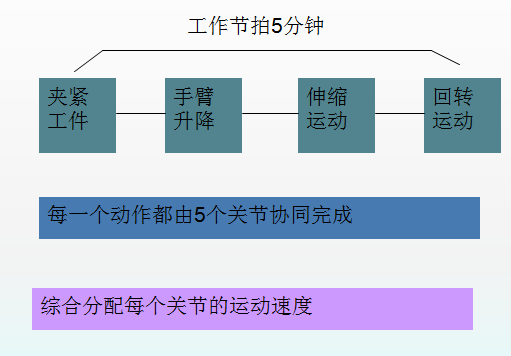
运动速度的确定:
主要是根据生产需要的工作节拍分配每个动作的时间,进而根据机械手各部位的运动行程确定其运动速度。
定位精度的确定:
机器人的定位精度是根据使用要求确定的。而要达到这样的精度取决于机器人的定位方式、运动速度、控制方式、臂部刚度、驱动方式、缓冲方法等。
运动速度确定举例
2.机器人运动形式的选择
直角坐标型:机器人的主体结构的关节都是移动关节。
特点:
结构简单,刚度高。
关节之间运动相互独立,没有耦合作用。
占地面积大,导轨面防护比较困难。
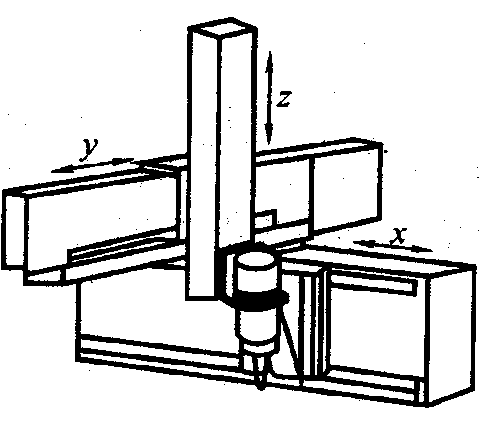
直角坐标机器人
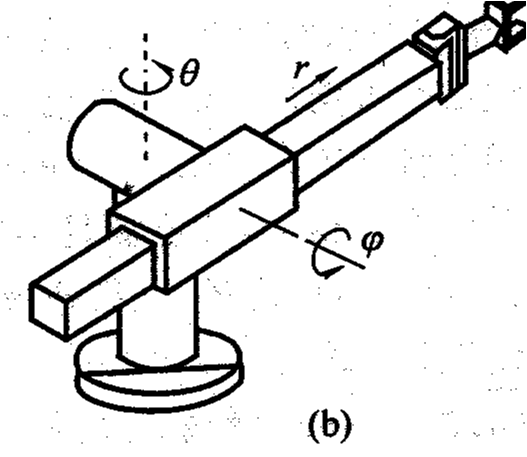
圆柱坐标型:
圆柱坐标式机器人主体结构具有三个自由度:腰转、升降和伸缩。亦即具有一个旋转运动和两个直线运动。
特点:
通用性较强;结构紧凑;
机器人腰转时将手臂缩回,减少了转动惯量;受结构限制,手臂不能抵达底部,减少了工作范围。
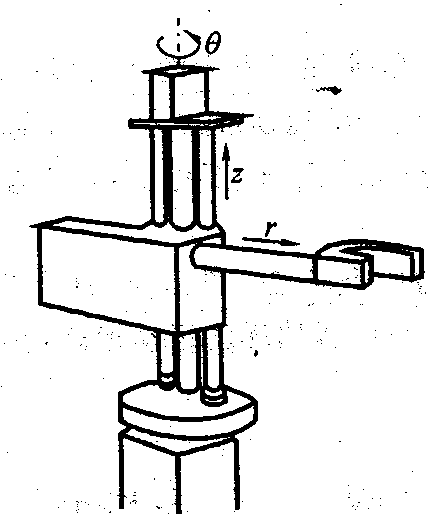
圆柱坐标式机器人
球面坐标式(极坐标):机器人主体结构具有三个自由度,两个旋转运动和一个直线运动。
特点:
工作范围较大;
占地面积小;
控制系统复杂。
球(极)坐标式机器人
SCARA机器人:有3个旋转关节,其轴线相互平行,在平面内进行定位和定向。另一个是移动关节。这种结构轻便、响应快。
特点:
结构轻便,响应快;
适用于平面定位和在垂直方向进行作的场合。
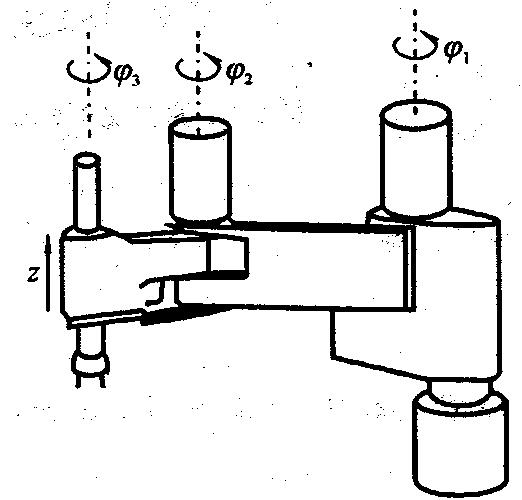
SCARA机器人
关节式机器人:关节式机器人的主体结构的三个自由度腰转关节、肩关节、肘关节全部是转动关节。
特点:
动作灵活,工作空间大;
关节运动部位密封性好;
运动学复杂,不便于控制。
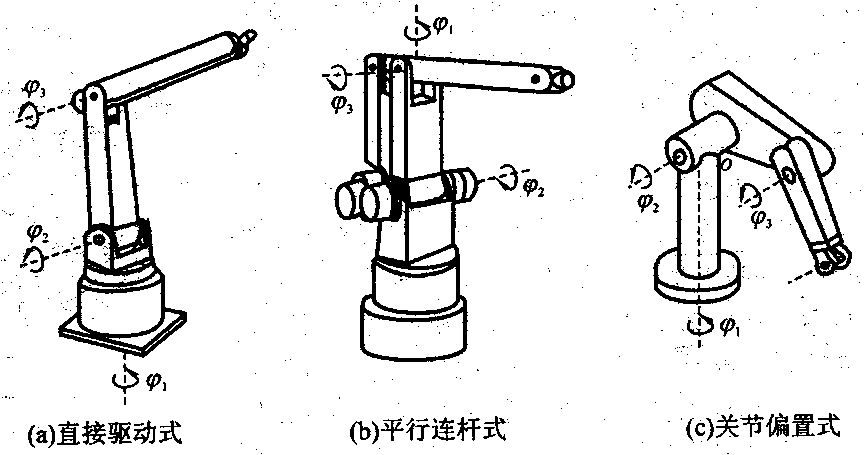
关节式机器人
三、结构设计
机器人的结构设计包括:
(1) 驱动装置和传动机构的选择;
(2) 机身和手臂的设计,如图2.67所示;
(3) 腕部设计;
(4) 手部设计,如图2.68所示;
初步确定机器人的结构:
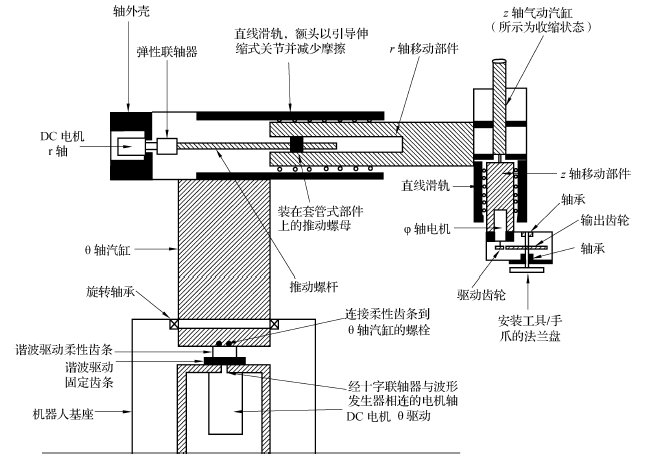
图2.67 机器人机身和手臂结构
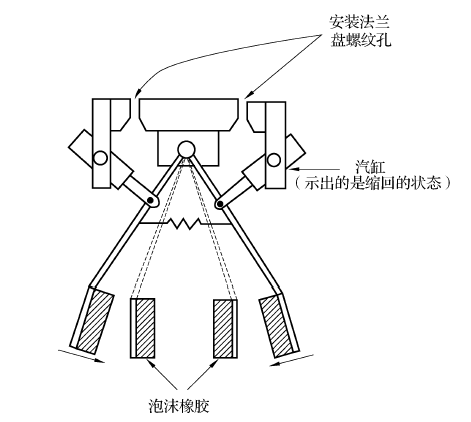
图2.68 机器人手部结构
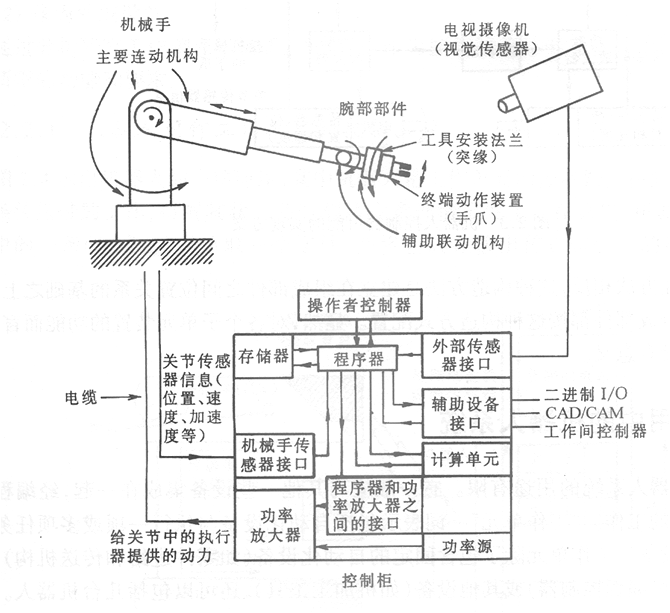
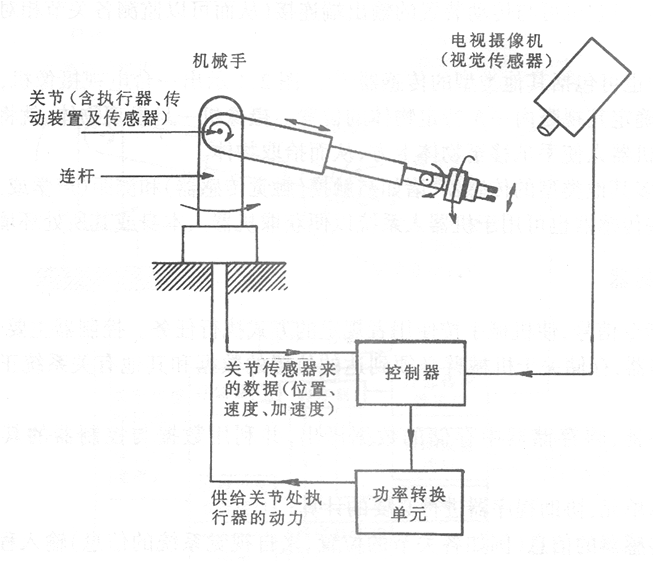
图例:传感系统框图:
图例:控制系统总体方案