为了使手部能处于空间任意方向,要求腕部能实现对空间三个坐标轴X、Y、Z的转动,即具有回转、俯仰和偏转三个自由度,如2.38图所示。
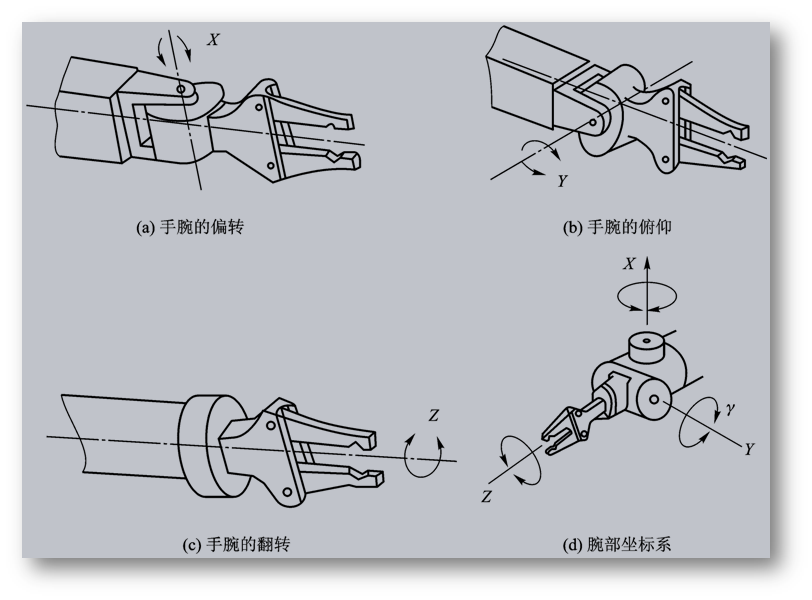
图2.38 手腕的坐标系和自由度
1、腕部自由度
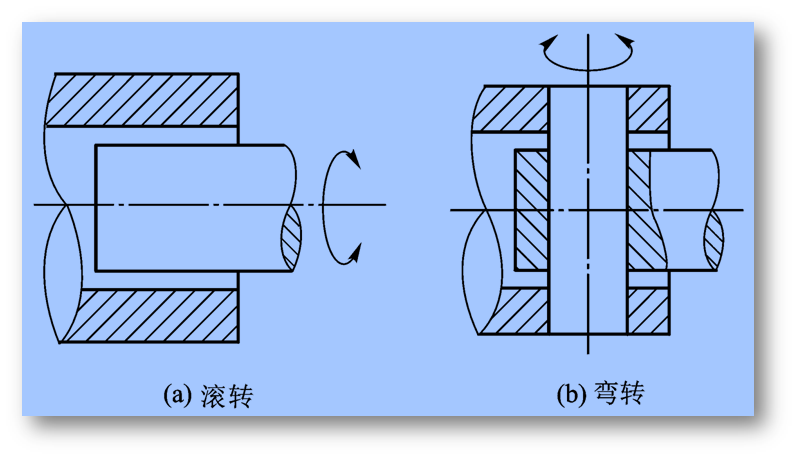
(1)手腕关节的滚转和弯转
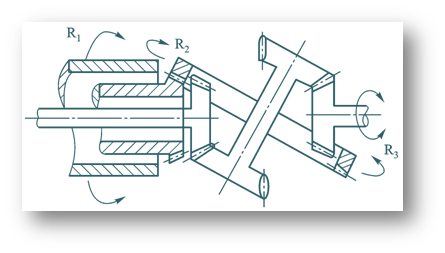
(2)RRR手腕
三自由度手腕可以是由B关节和R关节组成的多种形式的手腕,实现翻转、俯仰和偏转功能,常用的有BBR、RRR、BRR、RBR和RBB等形式,如图2.41所示。
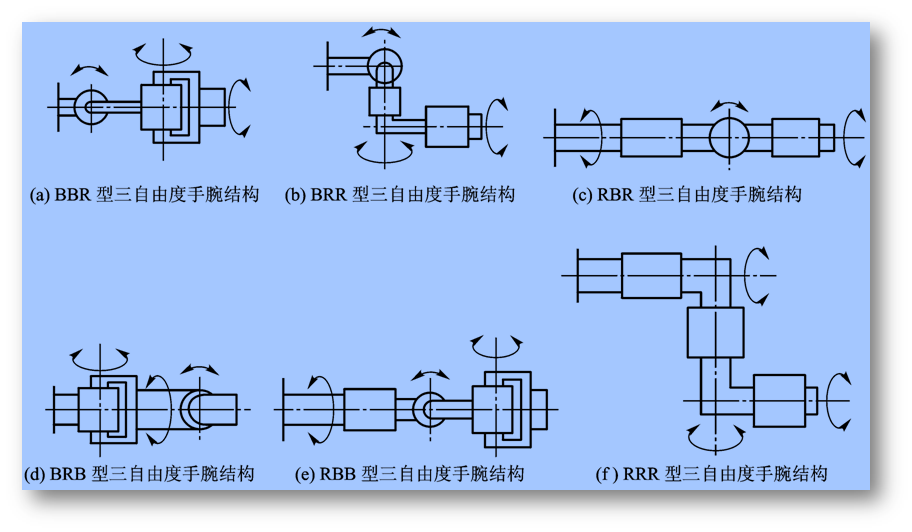
图2.41 3自由度手腕的结合方式示意图
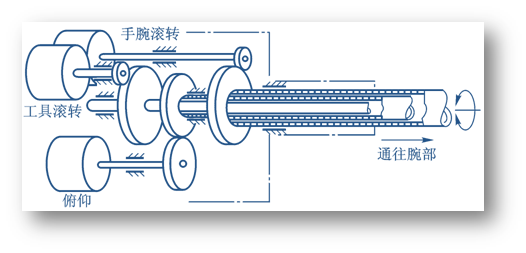
3R手腕关节远程传动示意
3R手腕结构示意
2、腕部的典型结构
(1)单自由度回转运动手腕
单自由度回转运动手腕用回转油缸或气缸直接驱动实现腕部回转运动。图2.42所示是采用回转油缸直接驱动的单自由度腕部结构。这种手腕具有结构紧凑,体积小,运动灵活,响应快,精度高等特点,但回转角度受限制,一般小于270°。
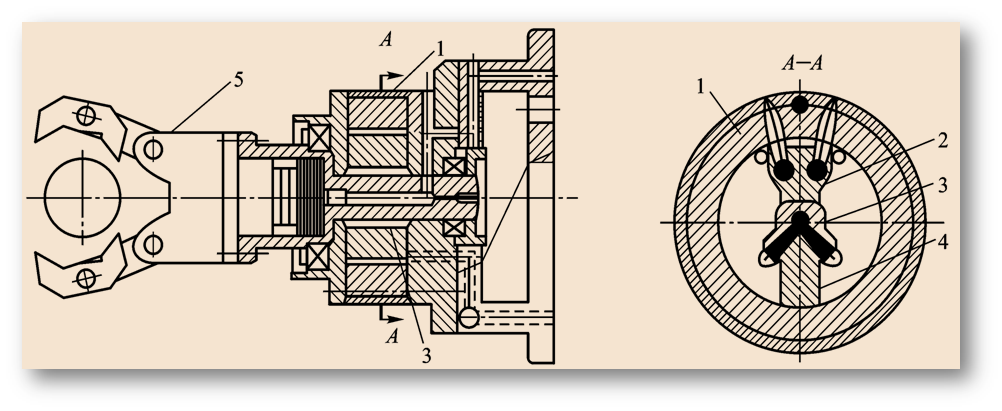
图2.42 回转油缸直接驱动的单自由度腕部结构
1—回转缸;2 —定片;3 —腕回转轴;4 —动片;5 —手部
(2)二自由度手腕
1)双回转油缸驱动的腕部
图2.43所示是采用两个轴线互相垂直的回转油缸的腕部结构。V-V剖面为腕部摆动回转油缸,工作时,动片6带动摆动回转油缸5使整个腕部绕固定中心轴3摆动。L-L剖面为腕部回转油缸,工作时,回转轴7带动回转中心轴2,实现腕部的回转运动,。
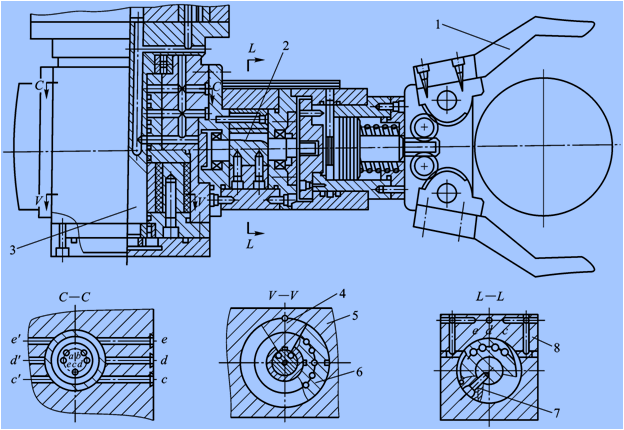
图2.43 具有回转与摆动的二自由度腕部结构
1—手部; 2—中心轴; 3—固定中心轴; 4—定片;
5—摆动回转缸; 6—动片; 7—回转轴; 8—回转缸
2)齿轮传动二自由度腕部
图2.44所示为采用齿轮传动机构实现手腕回转和俯仰的二自由度手腕。手腕的回转运动由传动轴S传递,轴S驱动锥齿轮1回转,并带动锥齿轮2、3、4转动。因手腕与锥齿轮4为一体,从而实现手部绕C轴的回转运动。
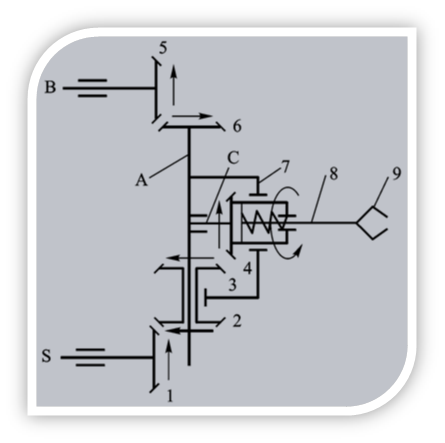
图2.44 齿轮传动回转和俯仰型腕部原理
1,2,3,4,5,6—锥齿轮; 7—壳体; 8—手腕; 9—手爪
(3)三自由度手腕
1)液压直接驱动三自由度手腕
图2.45所示是液压马达直接驱动,具有偏转、俯仰和回转三个自由度的手腕结构示意图。这种直接驱动手腕的关键是能否设计和加工出尺寸小,重量轻而驱动力矩大,驱动特性好的驱动电动机或液压驱动马达。
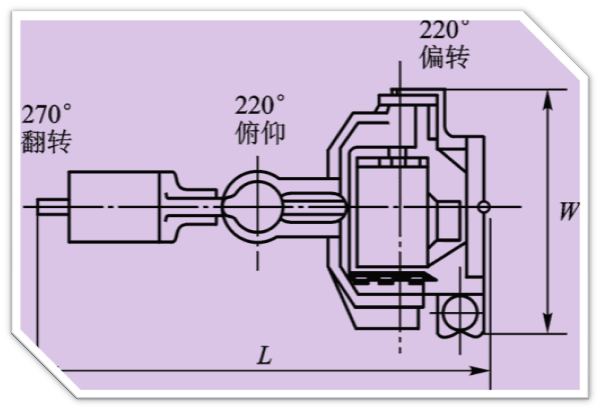
图2.45 液压直接驱动三自由度手腕
2)齿轮链轮传动三自由度腕部
图2.46所示为齿轮链轮传动实现偏转、俯仰和回转三个自由度运动的手腕原理图。齿轮链轮传动三自由度手腕在图2.44所示手腕的基础上增加了一个360°偏转运动。其工作原理如下: 当油缸1中的活塞作左右移动时,通过链条、链轮2、锥齿轮3和4带动花键轴5和6转动,而花键轴6与行星架9连成一体,因而也就带动行星架作偏转运动,即为手腕所增加的360°偏转运动。
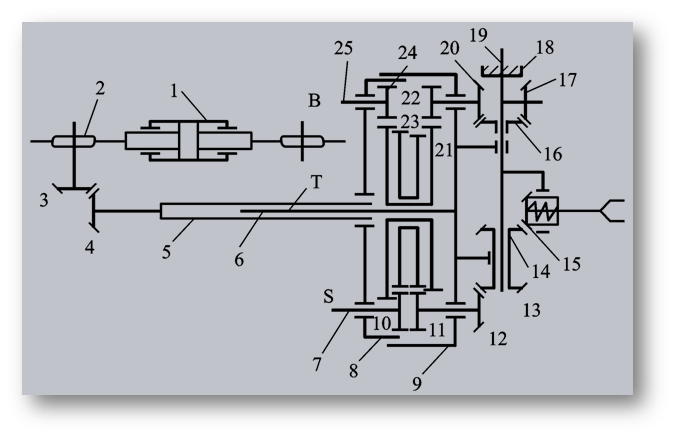
图2.46 齿轮链轮传动三自由度手腕原理图
1—油缸;2—链轮;3,4—锥齿轮;5,6—花键轴T;7—传动轴S;
8—腕架;9—行星架;10,11,22,24—圆柱齿轮;
12,13,14,15,16,17,18,20—锥齿轮;
19—摆动轴;21,23—双联圆柱齿轮;25—传动轴B
3、柔顺手腕
柔顺性装配技术主动柔顺装配和被动柔顺装配有两种。
主动柔顺装配是从检测、 控制的角度出发,采取各种不同的搜索方法, 实现边校正边装配;有的手爪还配有检测元件, 如视觉传感器(图2.47所示)、力传感器等。
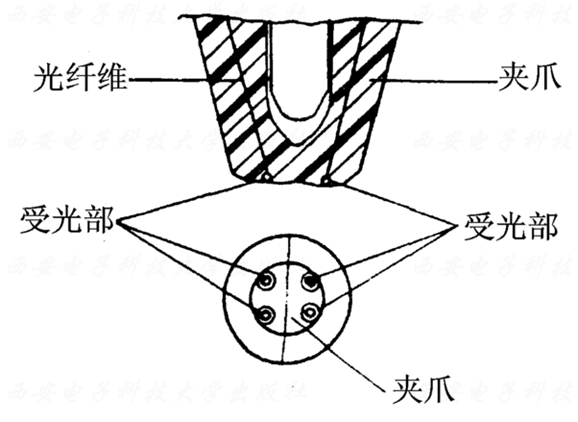
图2.47 带检测元件的手
被动柔顺装配是从结构的角度出发,在手腕部配置一个柔顺环节, 以满足柔顺装配的需要。图2.48所示是具有移动和摆动浮动机构的柔顺手腕。
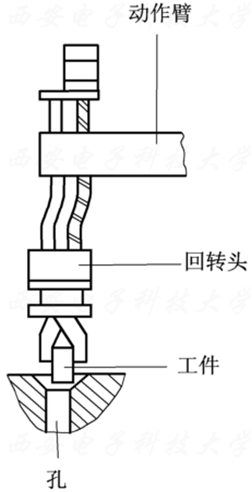
在装配作业中,如遇夹具定位不准或机器人手爪定位不准时,可自行校正。其动作过程如图2.49所示,在插入装配中工件局部被卡住时,将会受到阻力,促使柔顺手腕起作用,使手爪有一个微小的修正量,工件便能顺利插入。
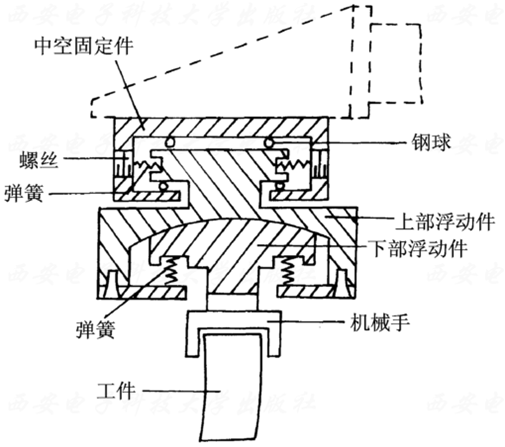
图2.48 移动摆动柔顺手腕
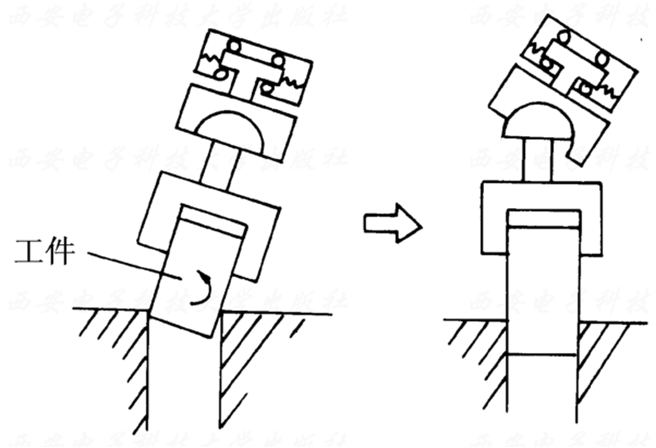
图2.49 柔顺手腕动作过程
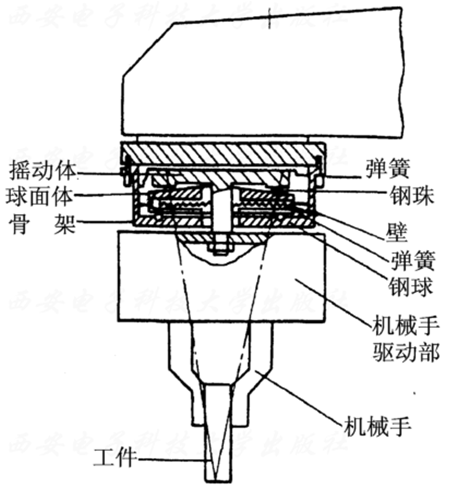
柔顺手腕
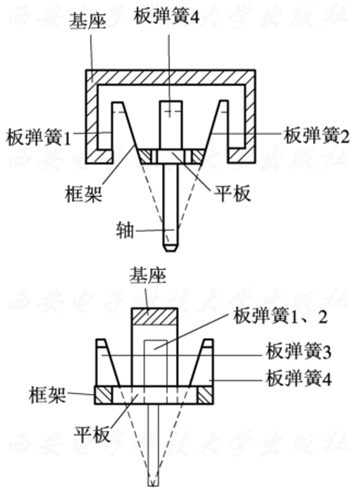
板弹簧柔顺手腕
钢丝弹簧柔顺手腕
4、设计腕部时应注意的问题