
1、机身结构的基本形式和特点
机器人机身(或称立柱)是支承臂部及手部的部件。
(1)机身与臂部的配置形式
(2)机身的典型结构
机身结构一般由机器人总体设计确定。现介绍回转与升降机身和回转与俯仰机身。
1)回转与升降机身
机身的回转与升降可液压缸实现。回转运动采用摆动油缸,升降运动采用升降油缸。布局时有两种方式: 一是升降油缸在下,回转油缸在上, 这种方式因摆动油缸安置在升降活塞杆的上方,故升降活塞杆的尺寸要加大,另一种是回转油缸在下,升降油缸在上,这时回转油缸的驱动力矩要设计得大一些,
另外,有时会采用一些传动机构将直线运动变为旋转运动,实现机身的回转。如图2.31所示,将链条的直线运动变为链轮的回转运动,它的回转角度可大于360°。
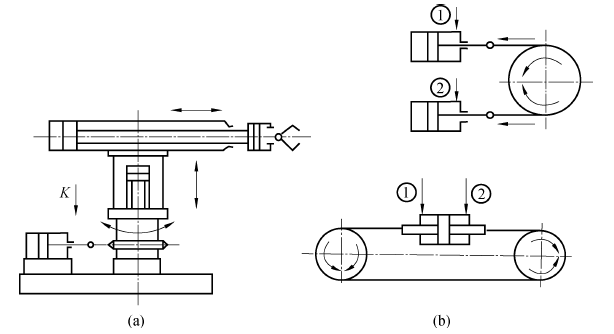
图2.31 链传动实现机身回转的原理图
(a) 单杆活塞气缸驱动链传动机构 (b) 双杆活塞气缸驱动链传动机构
2)回转与俯仰机身
机器人手臂的俯仰运动一般采用活塞油(气) 缸与连杆机构实现。手臂俯仰运动用的活塞缸位于手臂的下方,其活塞杆和手臂用铰链连接,缸体采用尾部耳环或中部销轴等方式与立柱连接,如图2.32所示。
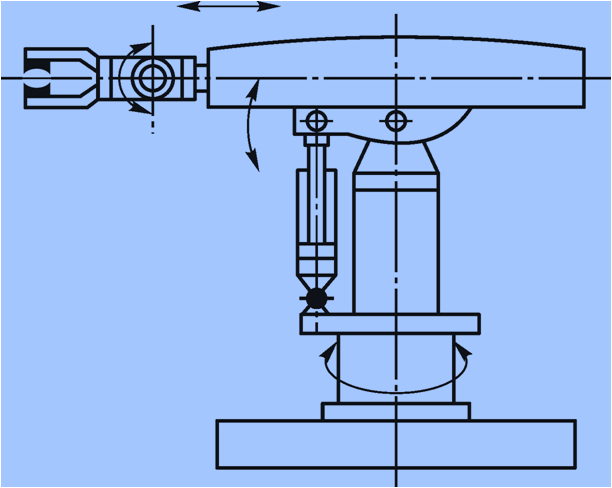
图2.32 回转与俯仰机身图
(3)机身驱动力(力矩)计算
1)垂直升降运动驱动力的计算
2)回转运动驱动力矩的计算
3)升降立柱下降不卡死 (不自锁)的条件计算
偏重力臂的大小为:
偏重力矩:
根据升降立柱平衡条件:
升降立柱依靠自重下降而不引起卡死的条件:
即:
(4)机身设计要注意的问题
• 1)刚度和强度大,稳定性要好
• 2)运动灵活,导套不宜过短,避免卡死
• 3)驱动方式适宜
• 4)结构布置合理
2、臂部结构的基本形式和特点
(1)臂部的典型机构
1)臂部伸缩机构
行程小时,采用油(气) 缸直接驱动: 行程较大时,可采用油(气) 缸驱动齿条传动的倍增机构或步进电动机及伺服电动机驱动,也可采用丝杠螺母或滚珠丝杠传动,为了增加手臂的刚性,防止手臂在伸缩运动时绕轴线转动或产生变形,臂部伸缩机构需设置导向装置,或设计方形、花键等形式的臂杆。常用的导向装置有单导向杆和双导向杆等,可根据手臂的结构、抓重等因素选取。
图2.34所示为采用四根导向柱的臂部伸缩结构。手臂的垂直伸缩运动由油缸3驱动,其特点是行程长,抓重大,工件形状不规则时,为了防止产生较大的偏重力矩,可采用四根导向柱。这种结构多用于箱体加工线上。
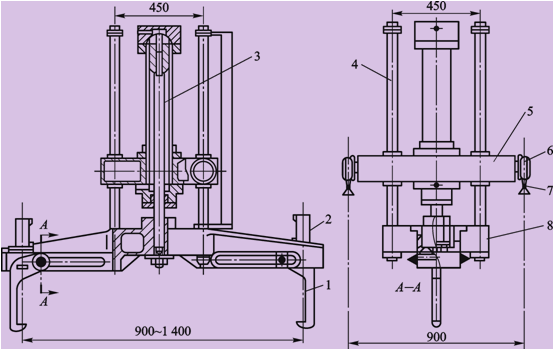
图2.34 四导向柱式臂伸缩机构
1—手部; 2—夹紧缸; 3—油缸; 4 —导向柱;
5—运行架; 6—行走车轮; 7—轨道; 8—支座;
2)手臂俯仰运动机构
通常采用摆臂油(气) 缸驱动、铰链连杆机构传动实现手臂的俯仰,如图2.35所示。
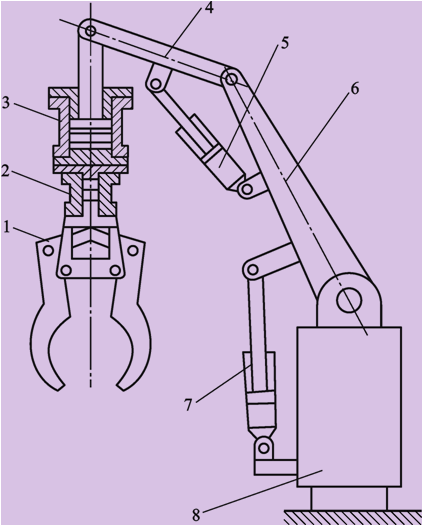
图2.35 摆动缸驱动连杆俯仰臂机构
1 —手部; 2 —夹紧缸; 3 —升降缸; 4 —小臂;
5,7 —摆动缸; 6 —大臂; 8 —立柱
3)手臂回转与升降机构
手臂回转与升降机构常采用回转缸与升降缸单独驱动,适用于升降行程短而回转角度小于360°的情况,也有采用升降缸与气马达-锥齿轮传动的结构。
(2)机器人手臂材料的选择
优先选择强度大而密度小的材料做手臂。其中,非金属材料有尼龙、聚乙烯(PEH)和碳素纤维等;金属材料以轻合金(特别是铝合金)为主。
(3)臂部设计要注意的问题
3、机器人的平稳性和臂杆平衡方法
为了减小驱动力矩和增加运动的平稳性,需要对手臂进行动力平衡。常见机器人臂杆的平衡方法有四种, 即质量平衡法、弹簧平衡法、气或液压平衡法和采用平衡电动机。下面仅对质量平衡法和弹簧平衡法加以介绍。
(1)质量平衡方法
臂杆质量平衡的原理是合理地分布臂杆质量,使臂杆重心尽可能落在支点上,必要时甚至采用在适当位置配置平衡质量(即配重) 的方法,使臂杆的重心落在支点上。在关节型机器人的应用中. 由于小臂杆质量对驱动扭矩的不利影响更大。因而在小臂杆上使用质量平衡法更为普遍。
图2.36所示为一种在质量平衡技术中最经常使用的平行四边形平衡机构, 图中L2,L3和G2,G2分别代表下臂和上臂的长度与质心;m2,m3和θ2,θ3分别代表它们的质量与转角,m为可移动的平衡质量,用来平衡下臂和上臂的质量。杆SA、AB与上臂、下臂铰接. 构成一个平行四边形平衡系统。可以证明,只要满足下式,就能使平行四边形结构处于平衡状态,即保证其力矩和为零。
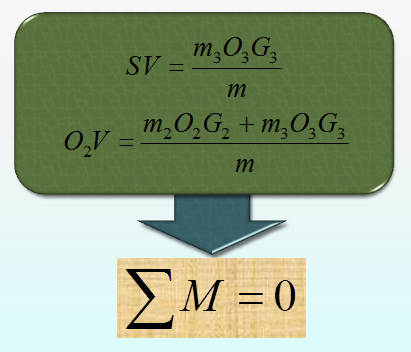
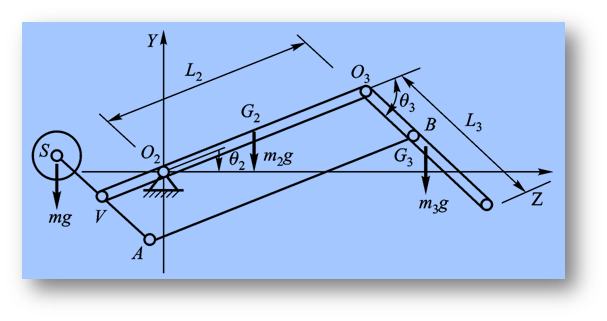
图2.36 机器人平行四边形平衡机构
(2)弹簧力平衡方法
弹簧平衡一般可以使用长弹簧。分析表明,在关节模型中,只要采用合适刚度和长度的弹簧平衡系统,可以全部平衡关节模型重力项。
如图2.37所示,设杆2代表要平衡的臂杆,平衡时在杆2的尾端离转动中心r2处安装一根长弹簧。长弹簧的另一端安装在长度为r1的固定连杆1上,固定连杆1的另一端固定在转动中心O上。如果杆2的原始位置和固定连杆1垂直,工作时杆2顺时针转动了角度θ,则在工作位置上弹簧力F 产生的平衡力矩M0为
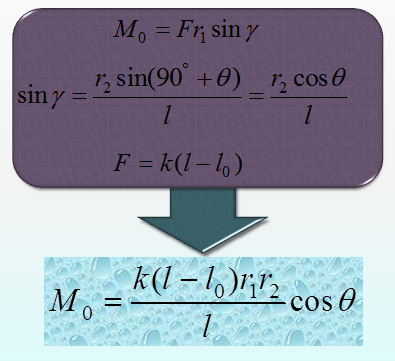
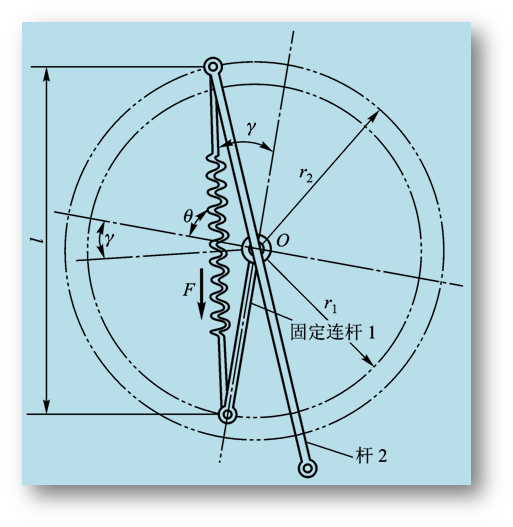
图2.37 弹簧平衡原理

