【案例导入】
工业机器人主要用在工业生产方面,比如搬运、焊接、喷漆等,现阶段应用最广泛的领域是在汽车制造领域。但如今,自动化生产需求促使工业机器人开始走进飞机制造领域。为制造波777 X巨大机翼的复合材料部分,美国因帕克电子公司(Electroimpact)在波音公司的参与下,设计和制造了新一代的机器人,准备用这种最新的自动化技术来生产飞机零部件和装配飞机。图3.1 机翼制造机器人。

图3.1 机翼制造机器人
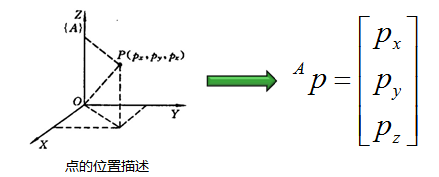
1.点的位置描述
在选定的直角坐标系{A},空间任一点P的位置可用3×1的位置矢量表示,左上标代表选定的参考坐标系{A}。
2.点的齐次坐标
将一个n维空间的点用n+1维坐标表示,则该n+1维坐标的齐次坐标。一般情况下称为该齐次坐标中的比例因子,当取
=1时,其表示方法称为齐次坐标的规格化形式。如用四个数组成的(4×1) 列阵

表示三维空间直角坐标系{ A} 中点P,则列阵称为三维空间点P的齐次坐标。
必须注意,齐次坐标的表示不是唯一的。我们将其各元素同乘一非零因子后,仍然代表同一点P,即

3.坐标轴方向的描述
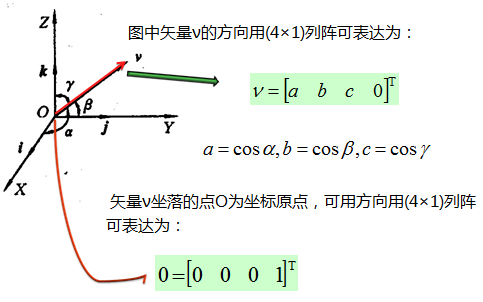
i、j、k分别是直角坐标系中x、y、z坐标轴的单位向量。若用齐次坐标来描述x、y、z轴的方向,则
规定:
(4×1)列阵[a b c o]中第四个元素为零,且a
+b
+c
=1,则表示某轴(某矢量)的方向;(4x1)列阵[a b c w]
中第四个元素不为零,则表示空间某点的位置。
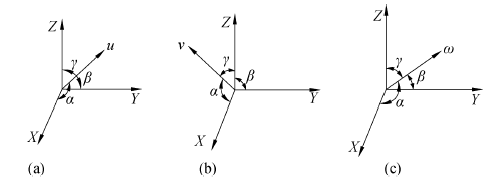
例:用齐次坐标写出下图矢量u、v、w的方向列阵:
(a) ,
,
;(b)
,
,
;(c)
,
,
;
解: 矢量u:,
,
矢量v:,
,
矢量w:,
,
4.动坐标系位姿的描述
动坐标系位姿的描述就是对动坐标系原点位置的描述以及对动坐标系各坐标轴方向的描述:
(1)刚体位置和姿态的描述
机器人的一个连杆可以看成一个刚体。若给定了刚体上某一点的位置和该刚体在空间的姿态,则这个刚体在空间上是完全确定的。刚体Q在固定坐标系OXYZ中的位置可用齐次坐标形式的一个(4×1)列阵表示为:

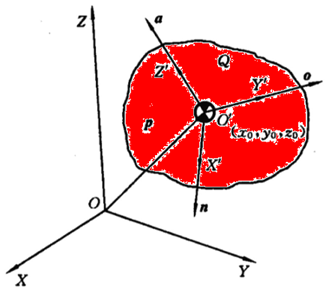
刚体的姿态可由动坐标系的坐标轴方向来表示。令n、o、a分别为X′、y ′、z ′坐标轴的单位方向矢量,每个单位方向矢量在固定坐标系上的分量为动坐标系各坐标轴的方向余弦,用齐次坐标形式的(4×1)列阵分别表示为:
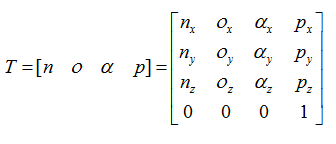
刚体的位姿可用下面(4×4)矩阵来描述:
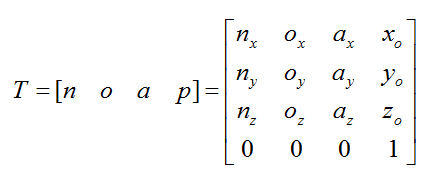
对刚体Q位姿的描述就是对固连于刚体Q的坐标系O`X`Y`Z`位姿的描述。
例:固连于刚体的坐标系{B}位于OB点,xb=10,yb=5,zb=0。ZB轴与画面垂直,坐标系{B}相对固定坐标系{A}有一个30o的偏转,试写出表示刚体位姿的坐标系{B)的(4×4)矩阵表达式:
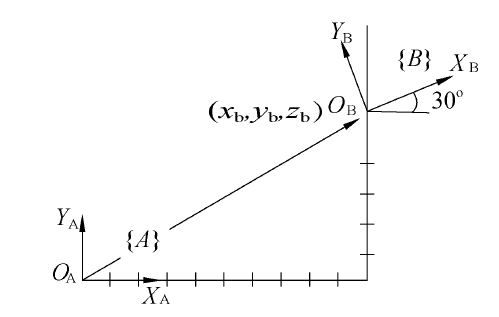
解:
(2)手部位置和姿态的表示
机器人手部的位置和姿态也可以用固连于手部的坐标系{B}的位姿来表示:
关节轴为,
轴的单位方向矢量α称为接近矢量,指向朝外。
二手指的连线为轴,
轴的单位方向矢量0称为姿态矢量,指向可任意选定。
轴与
轴及
轴垂直,
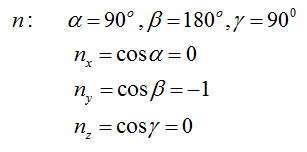
轴的单位方向矢量n称为法向矢量,且n=o×α,指向符合右手法则。
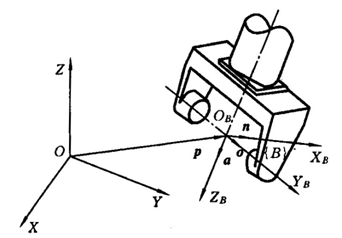
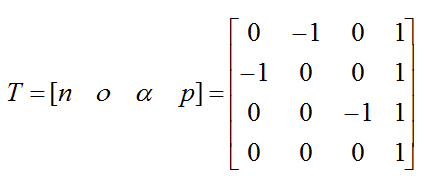
手部的位置矢量为固定参考系原点指向手部坐标系{B}原点的矢量p,手部的方向矢量为n、o、α。于是手部的位姿可用(4×4)矩阵表示为:
例:手部抓握物体Q,物体为边长2个单位的正立方体,写出表达该手部位姿的矩阵式。
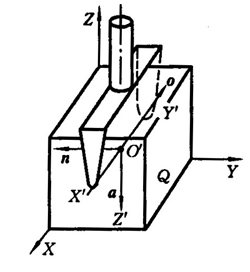
解:因为物体Q形心与手部坐标系0'X'Y'Z'的坐标原点0'相重合,所以手部位置的(4x1)列阵为:
手部坐标系X'轴方向可用单位矢量n来表示:
Y'轴与Z'轴的方向可分别用单位矢量o和α来表示:
手部位姿可用矩阵表达为: