
1、工业机器人的基本组成
工业机器人由3大部分6个子系统组成。 3大部分是机械部分、 传感部分和控制部分。 6个子系统是驱动系统、 机械结构系统、 感受系统、 机器人-环境交互系统、 人机交互系统和控制系统,如图1.28所示。
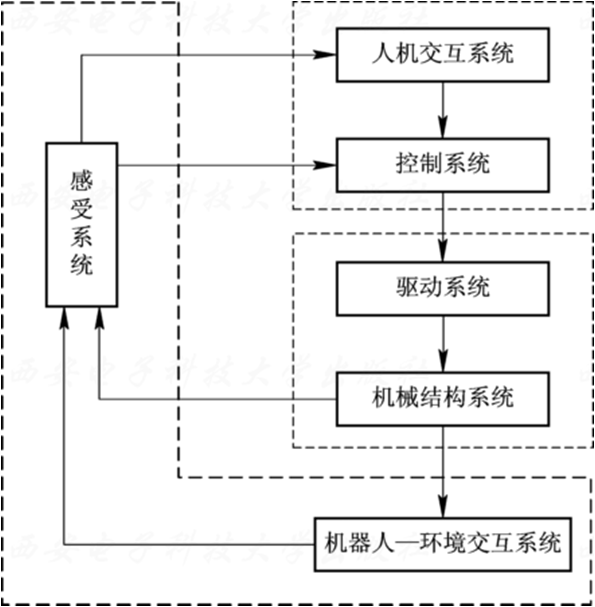
图1.28 机器人系统组成
六个子系统的作用分述如下:
(1)驱动系统
驱动系统是按照控制系统发出的控制指令将信号放大,驱动执行机构运动的传动装置。常用的有电气、液压、气动和机械等四种驱动方式。有些机器人采用这些驱动方式的组合, 如电—液混合驱动和气—液混合驱动等驱动方式。
(2)机械结构系统
工业机器人的机械结构系统由基座、手臂、末端操作器三大件组成,如图1.29所示。每一大件都有若干自由度, 构成一个多自由度的机械系统。 若基座具备行走机构, 则构成行走机器人; 若基座不具备行走及腰转机构, 则构成单机器人臂(SingleRobotArm)。手臂一般由上臂、下臂和手腕组成。末端操作器是直接装在手腕上的一个重要部件, 它可以是二手指或多手指的手爪, 也可以是喷漆枪、焊具等作业工具。
图1.29 工业机器人机械结构系统组成
1)末端执行器(或称手部)是机器人直接执行工作的装置,可安装夹持器、工具、传感器等。夹持器可分为机械夹紧、真空抽吸、液压夹紧、磁力吸附等。在手部安装的某些专用工具,如焊枪、喷枪、电钻、螺钉螺帽拧紧器等,可视为专用的特殊手部。
2)手腕是连接手臂和末端执行器的部件,用以调整末端执行器的方位和姿态。
3)手臂是支承手腕和末端执行器的部件。它由动力关节和连杆组成,用来改变末端执行器的空间位置。
4)机座是工业机器人的基础部件,承受相应的载荷,机座分为固定式和移动式两类。
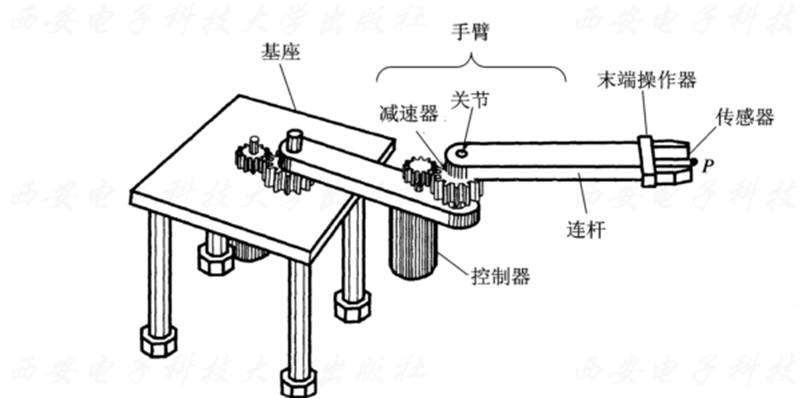
工业机器人的机械结构系统
(3)控制系统
控制系统是机器人的大脑,支配着机器人按规定的程序运动,并记忆人们给予的指令信息(如动作顺序、运动轨迹、运动速度等),同时按其控制系统的信息控制执行机构按规定要求动作。
(4) 感受系统
感受系统由内部传感器模块和外部传感器模块组成, 用以获取内部和外部环境状态中有意义的信息。智能传感器的使用提高了机器人的机动性、适应性和智能化的水准。人类的感受系统对感知外部世界信息是极其灵巧的, 然而,对于一些特殊的信息, 传感器比人类的感受系统更有效。
(5)机器人-环境交互系统
机器人-环境交互系统是实现工业机器人与外部环境中的设备相互联系和协调的系统。工业机器人与外部设备集成为一个功能单元, 如加工制造单元、 焊接单元、装配单元等。当然, 也可以是多台机器人、多台机床或设备、多个零件存储装置等集成为一个去执行复杂任务的功能单元。
(6) 人机交互系统
人机交互系统是使操作人员参与机器人控制并与机器人进行联系的装置, 例如, 计算机的标准终端, 指令控制台, 信息显示板, 危险信号报警器等。 该系统归纳起来分为两大类: 指令给定装置和信息显示装置。
2. 工业机器人的技术参数
工业机器人的技术参数是各工业机器人制造商在产品供货时所提供的技术数据。尽管各厂商提供的技术参数不完全一样, 工业机器人的结构、用途等有所不同, 且用户的要求也不同, 但工业机器人的主要技术参数一般应有自由度、重复定位精度、工作范围、最大工作速度和承载能力等。
(1)自由度(Degrees of Freedom)
自由度是指机器人各关节在三维空间对于独立坐标轴运动的数目,各关节自由度的总和就是工业机器人的自由度数。注意:不应包括手爪(末端操作器)的开合自由度。在三维空间中描述一个物体的位置和姿态(简称位姿)需要六个自由度。但是, 工业机器人的自由度是根据其用途而设计的, 可能小于六个自由度, 也可能大于六个自由度。
从运动学的观点看, 在完成某一特定作业时具有多余自由度的机器人, 就叫做冗余自由度机器人。利用冗余自由度可以增加机器人的灵活性、躲避障碍物和改善动力性能。
人的手臂(大臂、小臂、 手腕)共有七个自由度, 所以工作起来很灵巧,手部可回避障碍而从不同方向到达同一个目的点。
1)自由度数越高,机器人可以完成的动作越复杂,通用性越强,应用范围也越广。
2)每个自由度需要一个伺服轴进行驱动,相应地带来的技术困难也越大。
3)一般情况下,通用工业机器人有3~6个自由度。
(2)精度(Accuracy)
工业机器人精度是指定位精度和重复定位精度。 定位精度是指机器人手部实际到达位置与目标位置之间的差异。重复定位精度是指机器人重复定位其手部于同一目标位置的能力, 可以用标准偏差这个统计量来表示, 它是衡量一列误差值的密集度(即重复度)。如图1.30所示。
定位精度的高低取决于位置控制方式以及机器人运动部件本身的精度和刚度,此外还与提取重力和运动速度等因素有密切的关系。
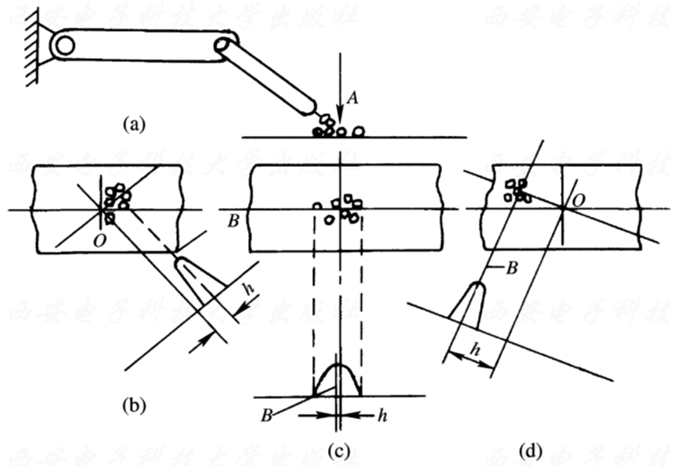
图1.30 工业机器人定位精度和重复定位精度的典型情况
(a) 重复定位精度的测量; (b) 合理定位精度,良好重复定位精度;
(c)良好定位精度,很差重复定位精度(d)很差定位精度,良好重复定位精度;
(3) 工作空间(Work Space)
工作空间是指机器人手臂末端或手腕中心所能到达的所有点的集合, 也叫工作区域。因为末端操作器的尺寸和形状是多种多样的, 为了真实反映机器人的特征参数, 所以, 这里是指不安装末端操作器时的工作区域。工作范围的形状和大小是十分重要的, 机器人在执行作业时可能会因为存在手部不能到达的作业死区(Dead Zone)而不能完成任务。
1)机器人的工作空间主要取决于臂部的自由度和每个关节的运动范围。
2)腕部的自由度主要用来调整手部在空间的方位。
3)手指的开闭动作,仅用于夹放工件或工夹具,它不改变工件或工夹具的空间位置和方位,所一般不计入机器人的自由度数。
(4) 速度(Speed)
速度和加速度是表明机器人运动特性的主要指标。运动速度影响机器人的工作效率,它与机器人所提取的重力和位置精度均有密切的关系。说明书中通常提供了主要运动自由度的最大稳定速度。(思考:最大稳定速度高,是否代表机器人的性能好?)
1)运动速度高,机器人所承受的动载荷增大,必将在加减速时承受较大的惯性力,影响机器人的工作平稳性和位置精度。
2)加速或减速过快, 有可能引起定位时超调或振荡加剧, 使得到达目标位置后需要等待振荡衰减的时间增加, 则也可能使有效速度反而降低。
所以, 考虑机器人运动特性时, 除注意最大稳定速度外, 还应注意其最大允许的加减速度。目前的技术水平而言,通用机器人的最大直线运动速度大多在1000 mm/s以下。
(5) 承载能力(Payload)
承载能力是指机器人在工作范围内的任何位姿上所能承受的最大质量。承载能力不仅决定于负载的质量, 而且还与机器人运行的速度和加速度的大小和方向有关。为了安全起见, 承载能力这一技术指标是指高速运行时的承载能力。 通常, 承载能力不仅指负载, 而且还包括了机器人末端操作器的质量。机器人有效负载的大小除受到驱动器功率的限制外, 还受到杆件材料极限应力的限制, 因而它又和环境条件(如地心引力)、 运动参数(如运动速度、 加速度以及它们的方向)有关。图1.31所示为三菱装配机器人不带电动手爪时的承载能力,图1.32所示为三菱装配机器人带电动手爪时的承载能力。
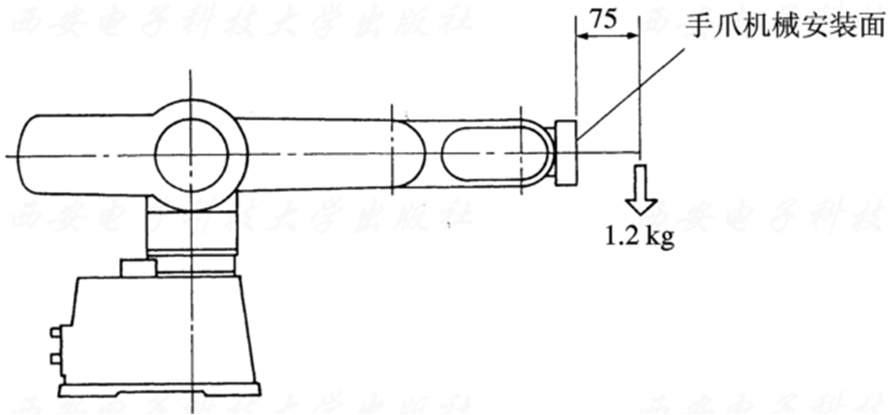
图1.31 三菱装配机器人不带电动手爪时的承载能力
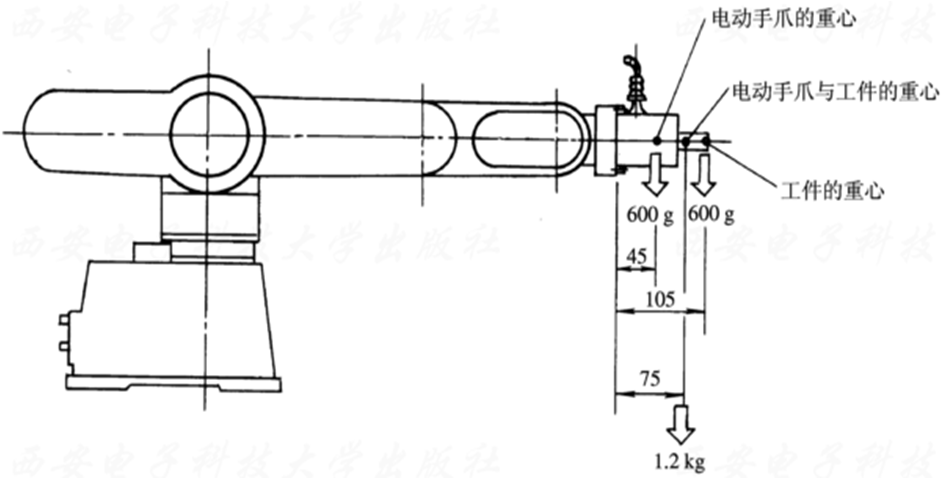
图1.32 三菱装配机器人带电动手爪时的承载能力

