
1、按照应用类型分类
机器人按照应用类型可分为工业机器人、极限作业机器人和服务型机器人。
(1)工业机器人
在工业领域内应用的机器人称为工业机器人。通常将工业机器人的定义为一种能模拟人的手、臂的部分动作,按照预定的程序、轨迹及其它要求,实现抓取、搬运工件或操作工具的自动化装置。与人相比,可以有更快的运动速度,可以搬更重的东西,而且定位精度更高。工业机器人在实现智能化、多功能化、柔性自动化生产、提高产品质量、代替人在恶劣环境条件下工作中发挥重大作用。

弧焊机器人

喷漆机器人
(2)极限作业机器人
极限作业机器人主要是指在人们难以进入的核电站、海底、宇宙空间进行作业的机器人,也包括军用、建筑、农业机器人等。


机器人坦克
(3)空中无人飞行器
一种有动力的飞行器,它不载有操作人员,由空气动力装置提供提升动力,采用自主飞行或遥控驾驶方式,可以一次性使用或重复使用,并能够携带各种任务载荷。图为以色列“苍鹭”无人侦察机。

无人机

“暗星”无人机

法国“红军”无人机

“别动队”无人机

高空无人侦察机
(4)服务机器人
小提琴机器人
足球机器人

护士助手机器人
高楼擦窗机器人
2.按照控制方式分类
机器人按控制方式可分为操作机器人、程序机器人、 示教再现机器人、 智能机器人和综合机器人。
(1)操作机器人。操作机器人由主、从机械手两部分组成,可实现远距离操作的机器人。人手操纵的部分称为主动机械手,而从动机械手基本上与主动机械手类似,只是从动机械手要比主动机器手大一些,作业时的力量也更大。达芬奇机器人是一款典型的操作机器人,如图1.18所示。

图1.18 达芬奇机器人
(2) 程序机器人。 程序机器人按预先给定的程序、 条件、 位置进行作业, 目前大部分机器人都采用这种控制方式工作。
(3) 示教再现机器人。示教再现机器人同盒式磁带的录放一样, 将所教的操作过程自动记录在磁盘、磁带等存储器中, 当需要再现操作时, 可重复所教过的动作过程。示教方法有手把手示教、有线示教和无线示教, 如图1.20所示。
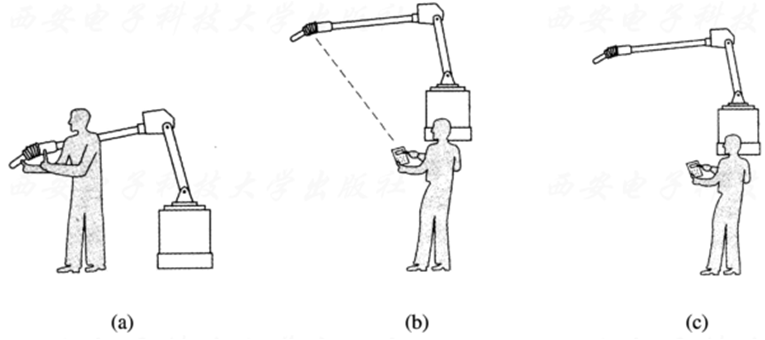
图 1.20 机器人示教
(a)手把手示教;(b)有线示教;(c)无线示教;
(4) 智能机器人。 智能机器人不仅可以进行预先设定的动作, 还可以按照工作环境的变化改变动作。
(5) 综合机器人。 综合机器人是由操作机器人、示教再现机器人、智能机器人组合而成的机器人, 如火星机器人。 1997年7月4日,“火星探险者(Mars Pathfinder)”在火星上着陆, 着陆体是四面体形状, 着陆后三个盖子的打开状态如图1.21所示。 它在能上、下、左、右动作的摄像机平台上装有两台CCD摄像机, 通过立体观测而得到空间信息。整个系统可以看做是由地面指令操纵的操作机器人。
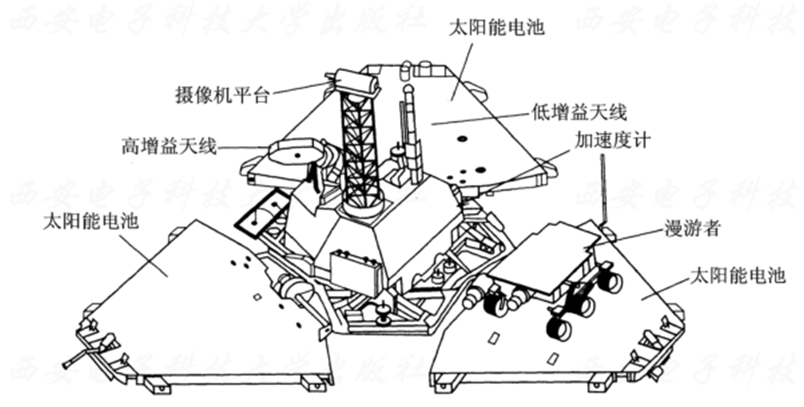
图 1.21 火星探险者
3. 机器人按坐标形式分类
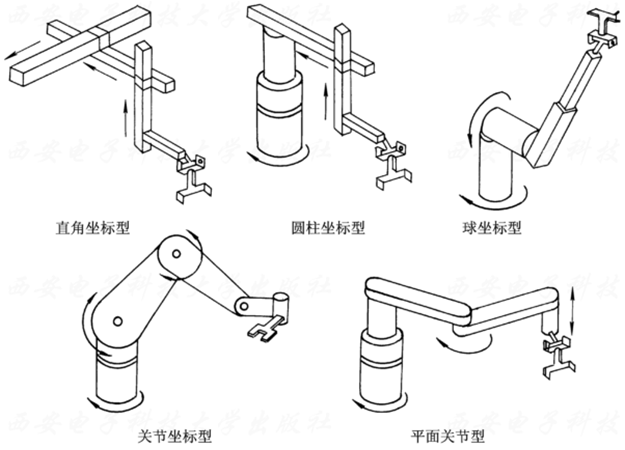
工业机器人的坐标形式有直角坐标型、 圆柱坐标型、球坐标型、关节坐标型和平面关节型,如下图所示。
(1)直角坐标/笛卡儿坐标/台架型(3P)
直角坐标型机器人由3个线性关节组成, 这3个关节用来确定末端操作器的位置, 通常还带有附加的旋转关节, 用来确定末端操作器的姿态。图1.22为直角坐标机器人的示意图。这种机器人在x、y、z轴上的运动是独立的, 运动方程可独立处理, 且方程是线性的, 因此很容易通过计算机控制实现;可以两端支撑,对于给定的结构长度, 刚性最大;它的精度和位置分辨率不随工作场合而变化, 容易达到高精度。但它操作范围小,手臂收缩的同时又向相反的方向伸出,既妨碍工作,又占地面积大, 运动速度低, 密封性不好。
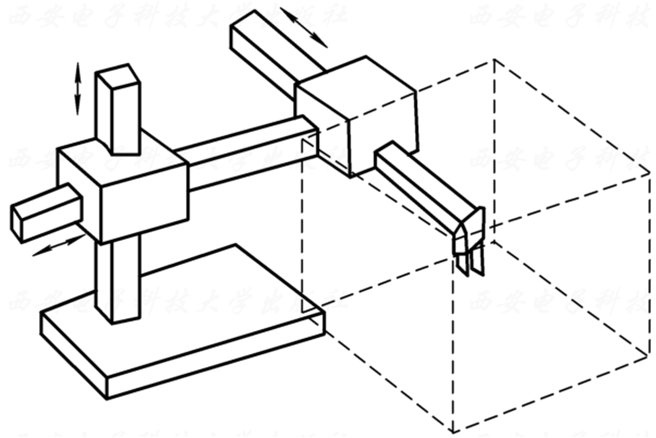
图1.22 直角坐标机器人的工作空间示意图
(2)圆柱坐标型(R2P)
圆柱坐标机器人由两个滑动关节和一个旋转关节来确定部件的位置, 再附加一个旋转关节来确定部件的姿态。图1.23为圆柱坐标机器人的示意图.这种机器人可以绕中心轴旋转一个角,工作范围可以扩大,且计算简单; 直线部分可采用液压驱动,可输出较大的动力; 能够伸入型腔式机器内部。但是,它的手臂可以到达的空间受到限制, 不能到达近立柱或近地面的空间;直线驱动部分难以密封、防尘;后臂工作时, 手臂后端会碰到工作范围内的其它物体。
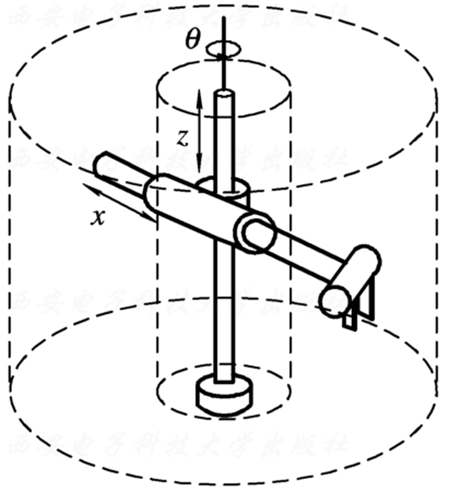
图 1.23 圆柱坐标机器人的工作范围
(3)球坐标型(2RP)
球坐标机器人采用球坐标系, 它用一个滑动关节和两个旋转关节来确定部件的位置,再用一个附加的旋转关节确定部件的姿态。这种机器人可以绕中心轴旋转,中心支架附近的工作范围大,两个转动驱动装置容易密封,覆盖工作空间较大。 但该坐标复杂, 难于控制, 且直线驱动装置仍存在密封及工作死区的问题。球坐标机器人的工作范围呈球缺状, 如图1.24所示。
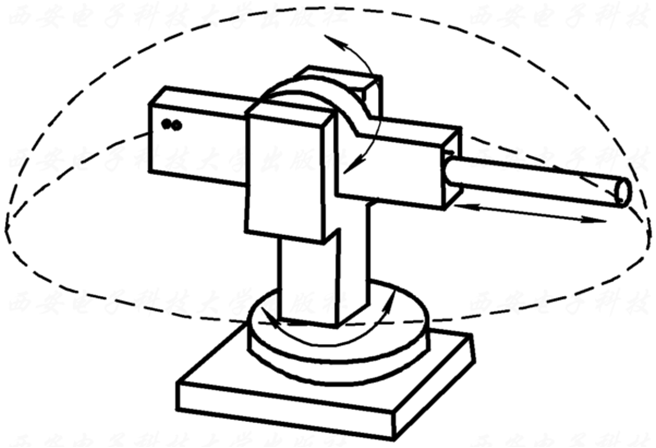
图 1.24 球坐标机器人的工作范围
(4) 关节坐标型/拟人型(3R)
关节机器人的关节全都是旋转的,类似于人的手臂,是工业机器人中最常见的结构。图1.25为PUMA 562工业机器人,是一种典型的关节坐标型机器人。
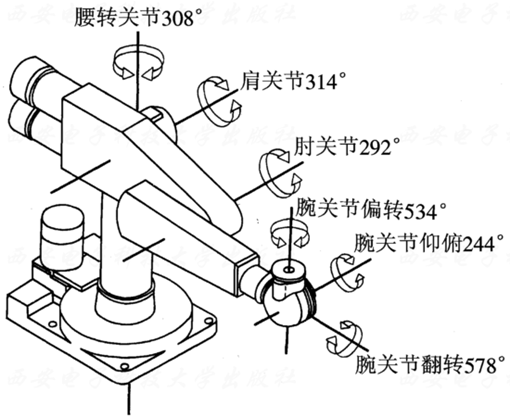
图 1.25 PUMA 562工业机器人
(5)平面关节型
这种机器人可看做是关节坐标式机器人的特例, 它只有平行的肩关节和肘关节,关节轴线共面。此外,再用一个附加的滑动关节做垂直运动。SCARA(SelectiveCompliance Assembly Robot Arm)机器人是最典型的平面关节型的机器人。它具有两个并联的旋转关节,可以使机器人在水平面上运动,SCARA机器人常用于装配作业,最显著的特点是它们在x-y平面上的运动具有较大的柔性,而沿z轴具有很强的刚性,所以它具有选择性的柔性。这种机器人在装配作业中获得了较好的应用。图1.26为4轴SCARA 机器人, 这种机器人在装配作业中获得了较好的应用。平面关节机器人的工作空间如图1.27所示。
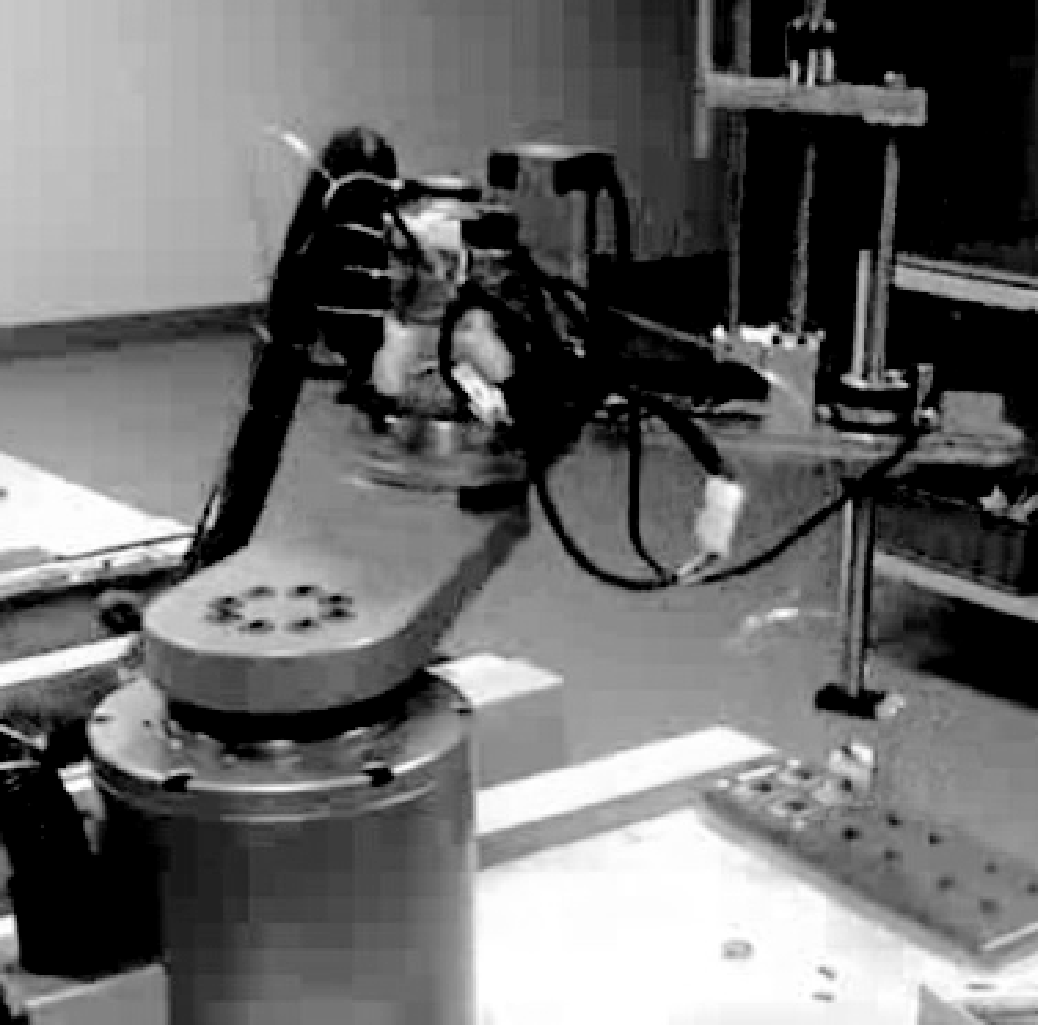
图1.26 4轴的SCARA机器人
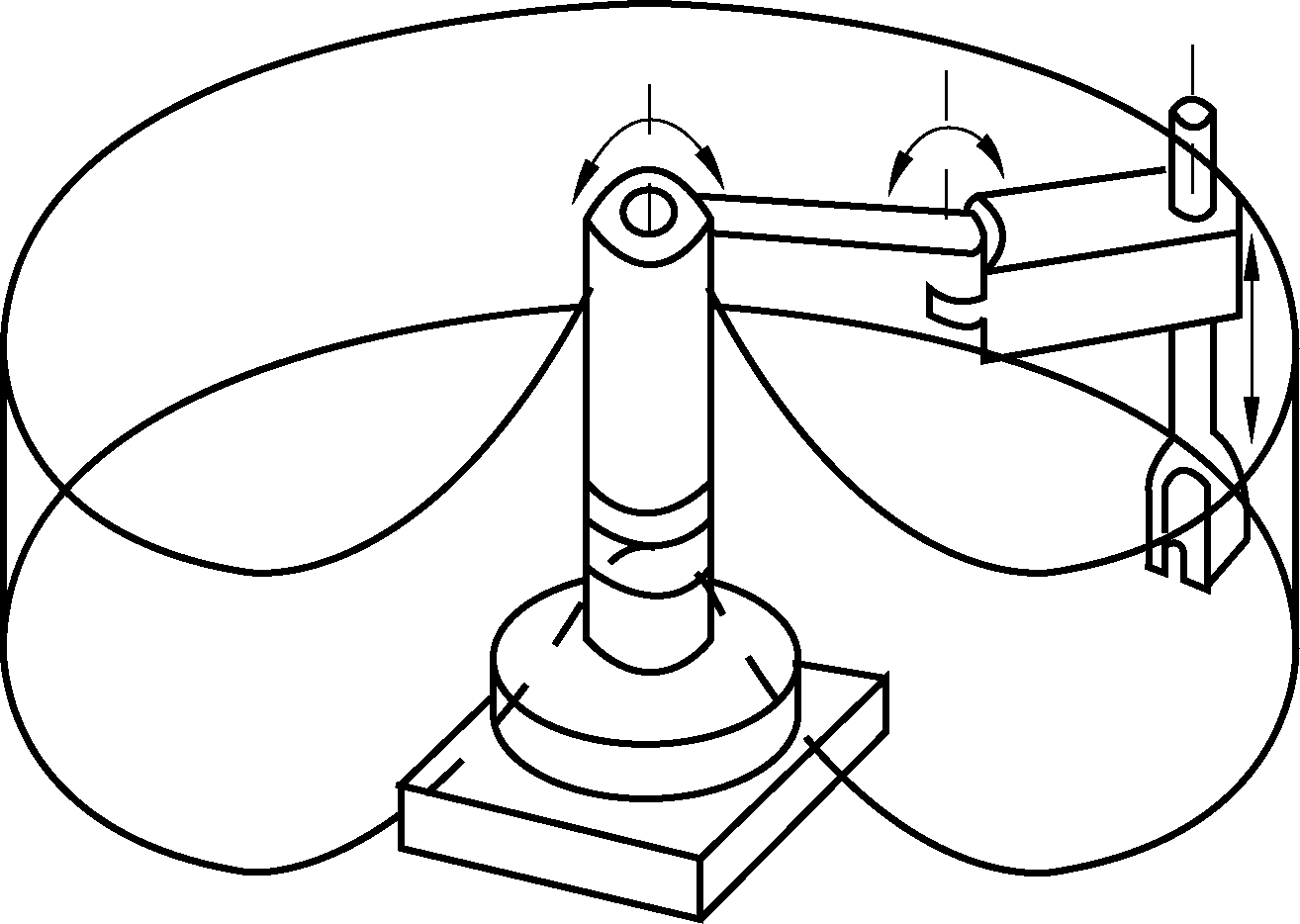
图1.27 平面关节型机器人的工作空间
4.按照承载能力分类
根据提取重力的不同,可将机器人分为:
(1)微型机器人,提取重力在10 N以下;
(2)小型机器人,提取重力为10~50 N;
(3)中型机器人,提取重力为50~300 N;
(4)大型机器人,提取重力为300~500 N;
(5)重型机器人,提取重力在500N以上。
目前实际应用机器人一般为中、小型机器人。

