
1. 古代“机器人”——-现代机器人的雏形
人类对机器人的幻想与追求已有3000多年的历史。
西周时期,我国的能工巧匠偃师研制出的歌舞艺人,是我国最早记载的机器人。
春秋后期,据《墨经》记载,鲁班制造过一只木鸟,能在空中飞行“三日不下” 。
公元前2世纪,古希腊人戴达罗斯发明了最原始的机器人──太罗斯,它是以水、空气和蒸汽压力为动力的会动的青铜雕像,它可以自己开门,还可以借助蒸汽唱歌。
1800年前的汉代,大科学家张衡不仅发明了地动仪,而且发明了计里鼓车,计里鼓车每行一里,车上木人击鼓一下,每行十里击钟一下。
后汉三国时期,蜀国丞相诸葛亮成功地创造出了“木牛流马”,并用其在崎岖山路中运送军粮,支援前方战争。图1.4所示是诸葛亮为运送军粮所设计的“木牛”。
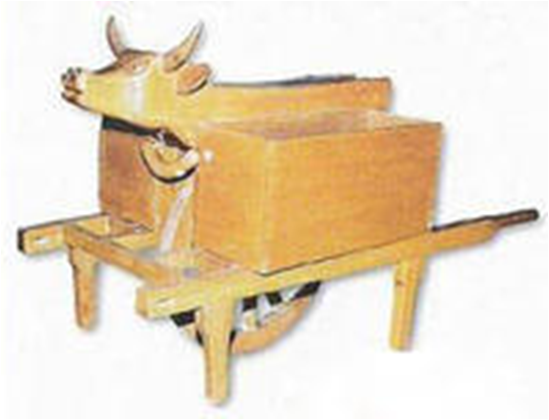
图1.4 运送军粮的“木牛”
1662年,日本的竹田近江利用钟表技术发明了自动机器玩偶,并在大阪的道顿堀演出。
1738年,法国天才技师杰克·戴·瓦克逊发明了一只机器鸭,它会嘎嘎叫,会游泳和喝水,还会进食和排泄。
1773年,著名的瑞士钟表匠杰克·道罗斯和他的儿子利·路易·道罗斯制造出自动书写玩偶、自动演奏玩偶等,他们创造的自动玩偶是利用齿轮和发条原理而制成的,它们有的拿着画笔和颜色绘画,有的拿着鹅毛蘸墨水写字,结构巧妙,服装华丽,在欧洲风靡一时。
1927年,美国西屋公司工程师温兹利制造了第一个机器人“电报箱”,并在纽约举行的世界博览会上展出,它是一个电动机器人,装有无线电发报机,可以回答一些问题,但该机器人不能走动。
2. 现代机器人的发展历史
1954年,美国戴沃尔最早提出了工业机器人的概念,并申请了专利。该专利的要点是借助伺服技术控制机器人的关节,利用人手对机器人进行动作示教,机器人能实现动作的记录和再现。这就是所谓的示教再现机器人,现有的机器人差不多都采用这种控制方式。
1958年, 被誉为“工业机器人之父”的Joseph F.EngelBerger创建了世界上第一个机器人公司——Unimation(UniversalAutomation)公司, 并参与设计了第一台Unimate机器人,如图1.6所示。
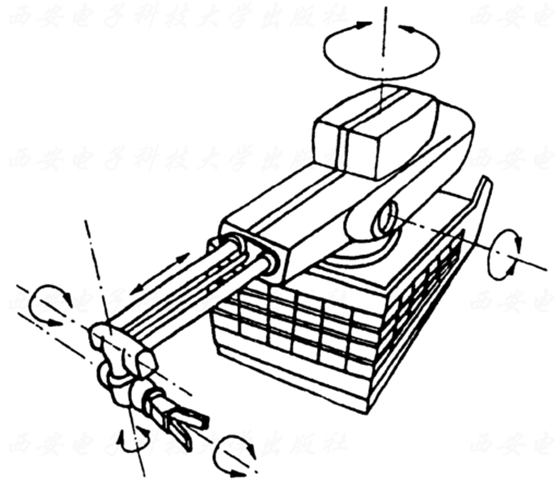
图1.6 Unimate机器人
这是一台用于压铸作业的五轴液压驱动机器人, 手臂的控制由一台专用计算机完成。它采用分离式固体数控元件, 并装有存储信息的磁鼓, 能够记忆完成180个工作步骤。
美国公司——AMF公司研制的Versatran (Versatile Transfer)机器人,如图1.7所示。 它主要用于机器之间的物料运输, 采用液压驱动。该机器人的手臂可以绕底座回转, 沿垂直方向升降, 也可以沿半径方向伸缩。
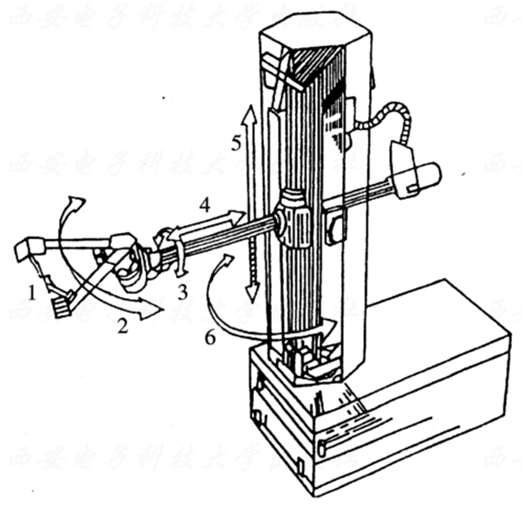
图1.7 Versatran机器人
水下机器人—蛟龙号

研制背景:为推动中国深海运载技术发展,为中国大洋国际海底资源调查和科学研究提供重要高技术装备,同时为中国深海勘探、海底作业研发共性技术。
空间机器人
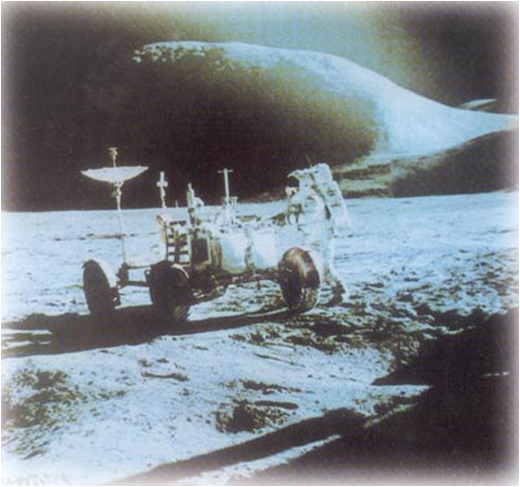
美国航空航天局(NASA)研究的月球车在月球表面时的情形
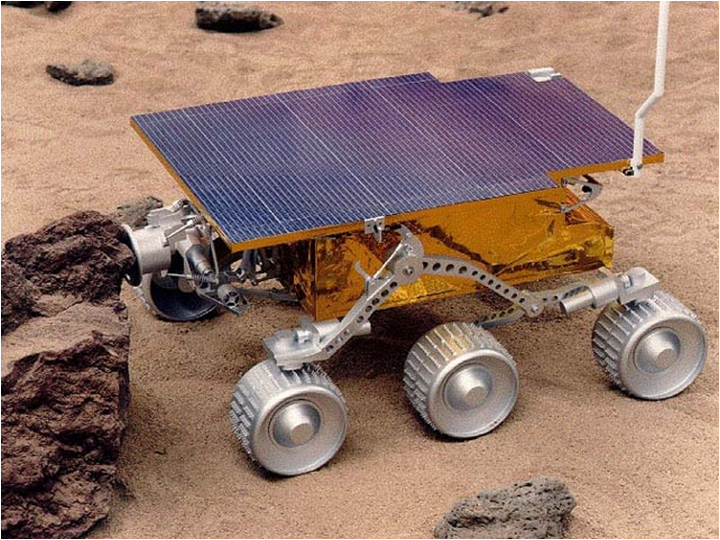
美国航空航天局(NASA)研究的 “索杰纳”火星车,该车成功地在火星上工作了250天。
3. 机器人未来的发展趋势
(1)语言交流功能越来越完美![]()
(2)各种动作的完美化
(3)外形越来越酷似人类
(4)逻辑分析能力越来越强
(5)具备越来越多样化功能
机器人的产生是社会科学技术发展的必然阶段,是社会经济发展到一定程度的产物,在经历了从初级到现在的成长过程后,随着科学技术的进一步发展及各种技术进一步的相互融合,我们相信机器人技术的前景将更加光明。

