
智能网联汽车的学习平台—Gazbo
上一节
智能网联汽车的学习平台——Gazebo
在外部真实场景下进行对智能网联汽车的操作、测试与研究是最有效的学习方法,但在不具备实际操作设备的情况下,可在虚拟仿真环境下学习智能网联汽车技术,从而加深对智能网联相关技术的认知与理解。
Gazebo是一款功能非常强大的虚拟仿真工具,拥有强大的物理引擎和高质量的图形界面,如图9-3所示。
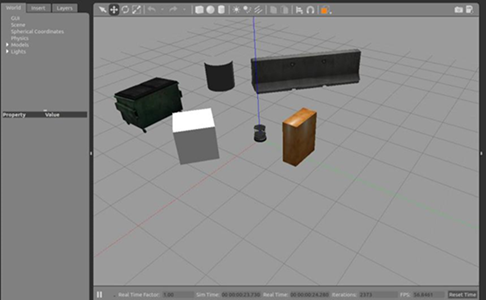
图9-3 Gazebo仿真测试画面
Gazebo 具有以下特点∶
1)模拟动力学,可访问多个高性能物理引擎。
2)提供了逼真的环境渲染,包括高质量的照明、阴影和纹理。
3)可生成带有噪声的仿真传感器,包括∶激光测距仪、2D/3D摄像机、Kinect 风格
的传感器、触点传感器、力-力矩传感器等。4)有很多基于传感器和环境控制的插件。5)提供了许多仿真模型。
6)可以在远程服务器上运行模拟操作,并能使用 protobufs 结构化数据存储格式进行
TCP/IP 的消息传输。
Gazebo在智能网联汽车中的应用,可以实现以下功能;
1)可以帮助智能网联汽车进行传感器设备的模拟调试与选择。
2)利用 Gazebo 提供的仿真环境,可以进行路径规划、实时避障以及相关导航算法的模拟试验。
3)配合ROS中的3D数据可视化工具,进行快速算法测试和人工智能学习,如图9-4所示。
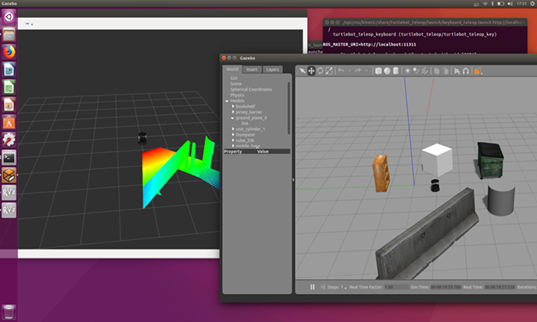
图9-4 ROS、Gazebo和Rviz可是化工具的结合使用

