
V2X
7.1 V2X
V2X是Vehicle to Everything的意思,即车辆自身和外界事物之间的信息交换。V2X作为智能网联汽车通信技术的核心,车辆自身主要与以下外界事物进行信息交换。
V2X包括车与车(vehicle to vehicle,V2V)、车与路(vehicle to infrastructure,V2I)、车与人(vehicle to pedestrian,V2P)、车与云(vehicle to network,V2N)等,为汽车驾驶和交通管理应用提供环境感知、信息交互与协同控制能力。从而获得实时路况、道路信息、行人信息等一系列交通信息,从而提高驾驶安全性、减少拥堵、提高交通效率、提供车载娱乐信息等。
为了支持多样化的车联网应用,车联网通信技术面临诸多挑战。车辆的高速运动,导致车辆作为通信节点构成的网络拓扑具有高速动态性与时空复杂性、引入更大的多普勒频偏、无线传播环境复杂快时变;高密度、多点对多点的车车通信受资源碰撞、远近效应等的影响,干扰环境更加复杂。
为此,产业界和学术界开展了车联网无线通信技术的研究。目前,车联网通信技术标准主要有两大类:DSRC(dedicated short range communication,即IEEE 802.11p)标准、蜂窝车联网(cellular vehicle to everything,C-V2X)标准。
1.V2V
V2V是Vehicle to Vehicle 的英文缩写,即车辆自身与其他车辆之间的信息交换,其应用场景如图7-1所示。
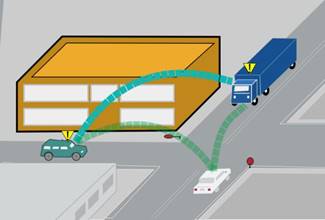
图7-1 V2V 应用场景
车辆自身与外界车辆之间的信息交换内容,主要包括以下几点∶
①当前本体车辆的行驶速度与附近范围内车辆的行驶速度进行信息内容的交换。
②当前本体车辆的行驶方向与附近范围内车辆的行驶方向进行信息内容的交换。
③当前本体车辆紧急状况与附近范围内车辆的行驶状况进行信息内容的交换。
2. V2I
V2I是Vehile to lnfrastnucture 的英文缩写,即车辆自身与基础设施之间的信息交换其应用场景如图7-2 所示。
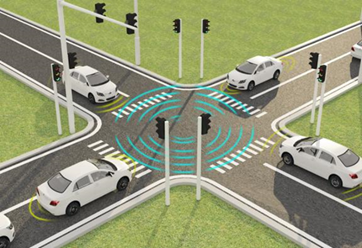
图7-2 V2I应用场景
基础设施主要包括红绿灯、公交站台、交通指示牌、立交桥、隧道、停车场等。车辆自身与基础设施之间的信息交换内容,主要包括以下几点∶
①车辆的行驶状态与前方红绿灯的实际状况进行信息内容的交换。
②车辆的行驶状态与途经公交站台的实际情况进行信息内容的交换。
③车辆当前行驶的方向和速度与前方交通标志牌所提示的内容进行信息上的交换。
④车辆的行驶状态与前方立交桥或隧道的监控情况进行信息内容的交换。
⑤车辆的导航目的地与停车场空位情况进行信息内容的交换。
3. V2P
V2P是Vehicle to Pedestrian的英文缩写,即车辆自身与外界行人之间的信息交换,其应用场景如图7-3所示。

图7-3 V2P 应用场景
车辆自身与外界行人之间的信息交换内容,主要包括以下几点∶
①车辆自身的行驶速度与行人当前位置进行信息内容的交换。
②车辆自身的行驶方向与行人当前位置进行信息内容的交换。
4. V2R
V2R是Vehicle to Road 的英文缩写,即车辆自身与道路之间的信息交换。按照道路的待殊性而言,V2R又可分为两大类型,一类是车辆自身与城市道路之间的信息交换;另一类是车辆自身与高速道路之间的信息交换,其应用场景如图7-4 所示。
图7-4 V2R应用场景
车辆自身与道路之间的信息交换内容,主要包括以下几点;
①车辆自身的行驶路线与道路当前路况进行信息内容的交换。
②车辆自身的行驶方向与前方道路发生的事故进行信息内客的交接。
③车辆行驶的导航信息与道路前方的路标牌进行信息内容的交换。
5. V2N
V2N是Vehicle to Network 的英文缩写,即车辆自身或驾驶人与互联网之间的信息交换,其应用场景如图7-5所示。

图7-5 V2N应用场景
车辆驾驶人与互联网之间的信息交换,主要包括车辆驾驶人通过车载终端系统向互联网发送需求,从而进行诸如娱乐应用、新闻资讯、车载通信等车辆驾驶人通过应用软件可及时从互联网上获取车辆的防盗信息。
车辆自身与互联网之间的信息交换,主要包括∶
①车辆自身的行驶信息和传感器数据,与互联网分析的大数据结果进行信息内容的交换。
②车辆终端系统与互联网上的资源进行信息内容的交换。
③车辆自身的故障系统与互联网远程求助系统进行信息内容的交换。
智能网联汽车V2X功能的实现条件是必须首先实现车辆自身的智能化,车辆的智能化主要包括车载传感器的感知功能、汽车数据通信处理能力,以及数据分析后的决策功能。只有在实现了车辆智能化的基础上,才能利用网络通信技术实现智能网联汽车 V2X的功能,如图7-6所示。
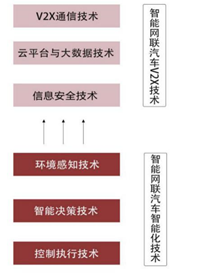
图7-6 双选会V2X功能的条件
目前,实现智能网联汽车 V2X功能的网络通信技术主要有移动网络通信技术和物联网无线通信技术。

