
车载以太网
以太网(Ethernet)是互联网中使用最多和最广泛的网络技术,自从1973年5月22 日作为个人计算机的局域网技术被发明以来,以太网技术快速发展并且成为 IEEE 802的下一个开放标准集合。汽车智能化、网联化甚至自动驾驶时代已经到来,ADAS技术的不断创新,高质量汽车娱乐音频和视频的应用,以及OTA远程升级、V2X、大数据、云计算等技术的发展都取得了进展。车载网络容量需求的爆炸性发展明显超过了传统车载网络(如CAN或 FlexRay)的承载能力,这也是以太网和汽车深度融合的机会。
6.2.1车载以太网的相关技术
1. 现有的主流车载网络技术
目前商用的车载网络主要有CAN、LIN、MOST、FlexRay、TTP/C以及LVDS 等,各个车载网络的对比见表6-2。
表6-2 常见车载网络对比
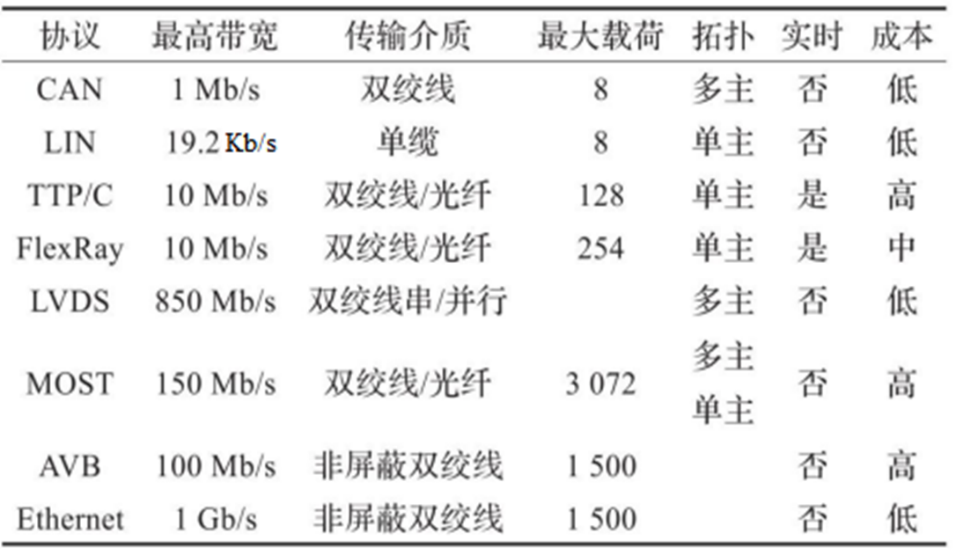
CAN主要用于车上控制数据传输,是目前车载网络应用最广泛的标准,最大传输速度为1Mbit/s。LIN 总线是一种低成本通用串行总线,在汽车领域用于车门、天窗、座椅控制等,最大传输速度为19.2 kbit/s。CAN、LIN 的带宽太低并不适用于 ADAS 等应用设计。
TTP/C是一种基于时分多址方式(TDMA)的时间触发通信协议,主要用于安全关键领域,例如航空电子设备或汽车领域X-by-Wire应用,最高传输速度为10Mbit/s,TTP/C 专为满足最高安全要求而开发,因此它不兼容事件触发系统。
FlexRay 允许同步和异步数据传输,同步部分基于TDMA 方法,异步部分使用灵活的时分多址方法(FTDMA),每个节点可以使用全带宽传输事件触发数据。FlexRay 被设计成用于容错环境下的线控制动等底盘系统应用。
MOST主要支持多媒体流数据传输,MOST150标准的最大带宽为150 Mbit/s,它是目前车载多媒体数据传输的首选协议,MOST150 支持基于IP的应用程序,由于单一供应商的问题,基础开发成本较高。
LVDS是一种电气数字信号系统(低电压差分信号,通过铜缆双绞线传输高速数据),最大带宽为850 Mbit/s,最长传输距离10m。在汽车领域,LVDS用于屏幕和摄像头之间的数据传输。此外,LVDS包含不开放协议,不同厂商的部件不支持数据交换,需要 ECU 充当网关。
2. 车载以太网的物理层技术
(1)适合车辆环境的以太网物理层元件 迈威尔(Marvell)与麦瑞(Micrel)半导体在2012年9月发布了全球首款完全符合IEEE 802.3标准的用于车载网络的以太网实体元件,最高可支持100 Mbit/s的速率。麦瑞半导体推出以太网物理层芯片支持高达 125 ℃的环境温度,目前市场上符合AECQ-100标准的以太网设备也并不单一,而且针对汽车市场的需求加强了静电保护(ESD保护),可以很好地适应汽车环境变化。
(2)BroadR-Reach的100 Mbi/s汽车以太网解决方案 BroadR-Reach 是博通公司针对汽车环境开发的数据传输技术,其特点是可用一对非屏蔽双绞线(UTP)实现100 Mbit/s 的传输速度,如图6-29所示,相对普通百兆以太网,连接电缆的成本已经显著降低。

图6-29 BroadR-Reach系统
恩智浦的TJA1100 作为模拟传输介质和数字 MAC 控制器之间的物理层组件接口,决定了链路的鲁棒性和发射性能,满足严格的汽车工业 EMC 需求,可以支持25 m 的电缆长度,而通常汽车解决方案处理的链路长度不超过10 m。
在域架构中使用高速骨干网通信将会大量减少 ECU 与电缆数量,对于车辆这意味着更少的成本、重量和能量消耗。使用单对非屏蔽双绞线电缆的BroadR-Reach技术,使以太网在汽车应用的成本竞争力大大提升。
(3)IEEE RTPGE 及 PoE 技术
以太网供电技术(PoE)是一种可以通过CAT5线缆传输数据信号的同时为该以太网设备进行直流供电的技术。IEEE802.3af(15.4 W)是第一个PoE 标准,是现在PoE应用的主流实现标准。IEEE802.3at(25.5 W)应大功率终端的需求而诞生,在兼容IEEE 802.3af 的基础上,提供更大的供电需求,可以满足视频监控系统等大功率应用的需求。如果在车载以太网上实现 PoE技术,将使线缆数量减少,降低成本,在电动车上应用前景更为广阔。
2013年7月,IEEE针对汽车及工业设备用途,在IEEE802.3内成立了探讨使用数据线供电(PoDL)及使用一对数据线供电(1PPoDL)工作组,1PPoDL 可用于IEEE802.3 内正在制定标准的 IEEE P802.3bp RTPGE 中。消费类产品使用的1000Base-TX 利用四对信号线实现了1Gbit/s的传输速度,而 RTPGE的目标则是利用少于四对的信号线来实现这一速度,未来的 RTPGE将为车载以太网提供线束更少、速度更高的以太网链接标准。
3.车载以太网的链路层协议
以太网的低廉成本和灵活性使它成为汽车互联设备的有力竞争者,但基于载波监听多路访问及冲突检测(CSMA/CD)技术的传统以太网,最大的缺点是不确定性或者说非实时性。当网络负荷较大时,网络传输的不确定性不能满足工业控制的实时性要求。传统以太网采用的是事件触发传输模式,在该模式下端系统可以随时访问网络,对于端系统的服务也是先到先服务。事件触发模式的一个明显缺点是,当几个端系统需要在同一传输媒介上进行数据通信时,所产生的传输时延和时间抖动会累积。
为了解决汽车领域以太网对实时关键数据的传输问题,目前技术最为成熟的两项技术是以太网音频视频桥接(EAVB)和时间触发以太网(TTEthernet)。
(1)IEEE时间敏感网络
TSN 以太网音频视频桥接技术(Ethernet Audio/Video Bridging,EAVB)是在传统以太网的基础上,使用精准时钟同步,通过保障带宽来限制传输延迟,提供高级别服务质量以支持各种基于音频视频的媒体应用。音频视频桥接(AVB)协议集如图
6-30所示。
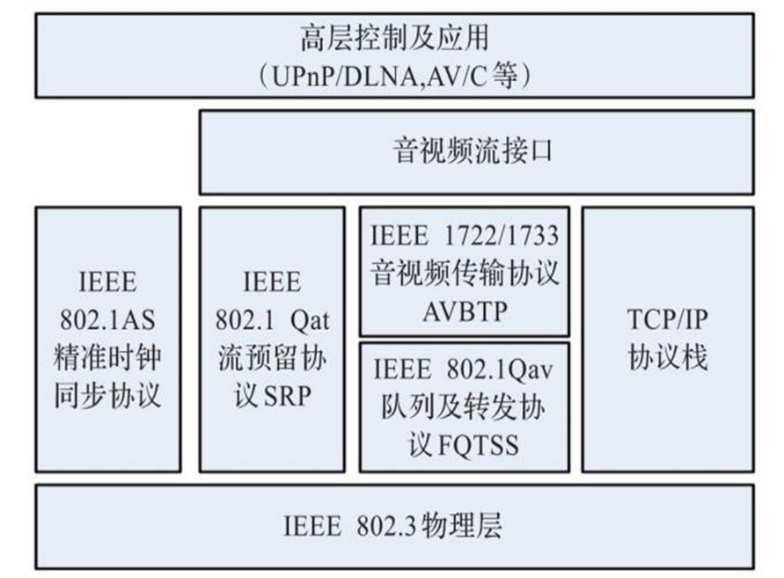
图6-30 AVB协议集
AVB工作组在2012年11月正式更名为时间敏感网络工作小组(Time-SensitiveNetworking,TSN),在更名为 TSN后,对部分原标准进行了修订,同时增添了几个性能改进标准,以便更好地适应汽车需要。
(2)TTEthernet
时间触发以太网(TimeTiggered Ethernet,TTEthernet)首次由 Kopetz 等人提出,是一种基于IEEE 802.3以太网之上的汽车或工业领域的实时通信候选网络。它允许实时的时间触发通信与低优先级的事件触发通信共存,使以太网具备满足高安全等级的系统要求的同时,依然可以承担对实时性要求不过分严格,但仍然需要高带宽的以太网传输需求。由 TTTech 公司开发的 TTEthernet 已经通过了美国汽车工程师学会的标准化(SAEAS6802)。
TTEthernet 协议控制框架如图6-31所示,TTEthernet 在单一网络中可以同时满足不同实时和安全等级的应用需要,支持三种不同的消息类型∶时间触发(TT)、速率约束(RC)和尽力而为(BE)。TT消息优先于所有其他类型,而RC 帧是保证提供预留的带宽,BE帧可以看成是标准以太网。TTEthermet在汽车中可应用于以下场合;
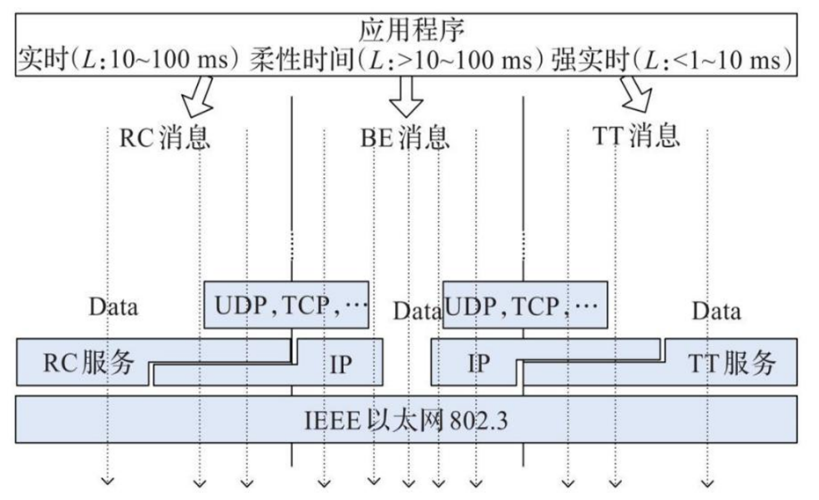
图6-31 TTEthermet 协议控制框架
1)高级驾驶辅助系统(ADAS),得益于高带宽和TT通信的结合。
2)多媒体、高带宽可靠数据通信、保证数据传输速率的音频和视频,是 TTEthernet 目前最有可能的应用领域。此外,通过使用TTEthernet 可以将驾驶辅助系统和信息娱乐系统集成到同一个网络。
3)X-By-Wire线控系统,TT服务提供的强实时通信、容错和故障运行,可以满足这些系统的通信要求。
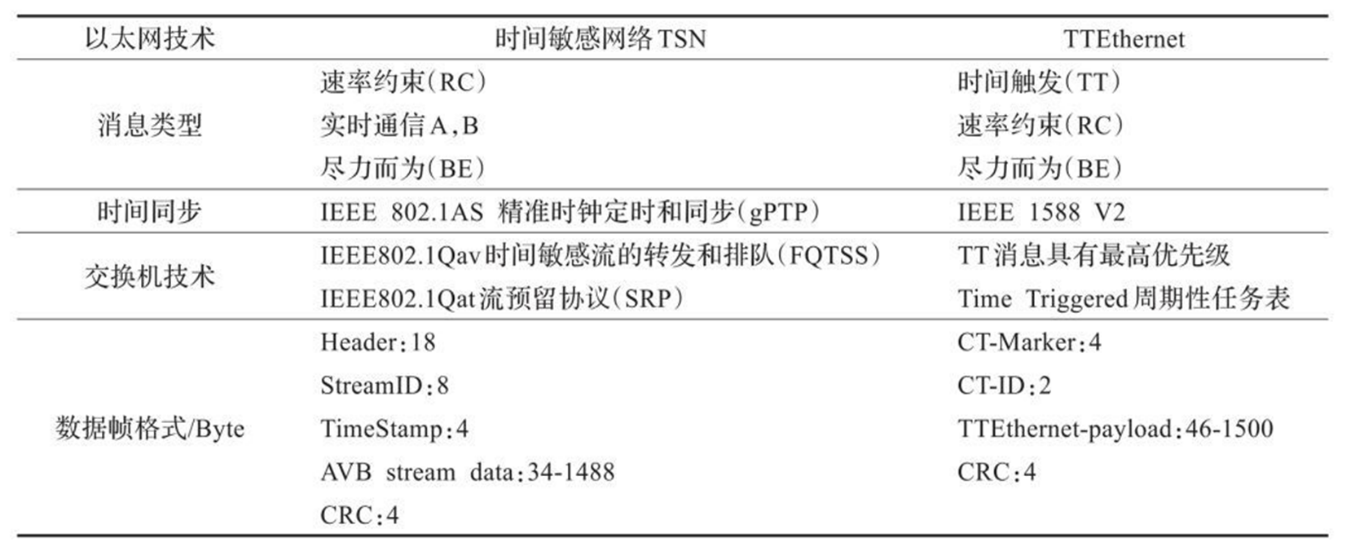
表6-3对时间敏感网络(TSN)和时间触发以太网(TEthernet)这两种车载以太网技术做了对比。
4. 车载以太网拓扑
车载以太网常见的拓扑结构有星型、菊花链型和树型,这些结构在交换式以太网中支持IEEE 802.3 和 IEEE 802.1Q标准。
星型拓扑结构如图6-32 所示,其特点是管理方便、极易扩展、安装维护成本低,但由于要专用的网络设备(如交换机)作为其核心节点,对核心设备的负担较重,可靠性要求高,各节点的分布处理能力较低。菊花链型拓扑结构如图6-33所示,其特点是由星型结构的基础网络构成,通过菊花链或串行的方式增加下一个节点。菊花链型拓扑结构容易扩展,各节点可以分布处理,网络设备的负担相对较轻,但节点之间的通信相对较复杂,安装维护成本较高。
结合以上两种拓扑结构实现了树型结构,在汽车网络中权衡了良好的分布处理性能和安装维护成本,图6-34给出了一种树型结构的车载以太网的实施方法。
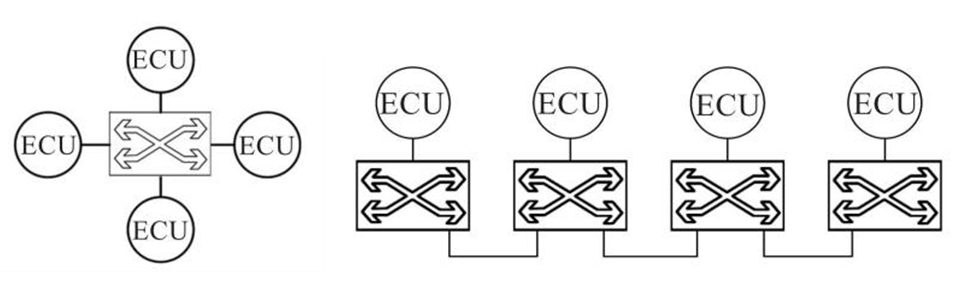
| 图6-32 星型拓扑结构 | 图6-33 菊花链型拓扑结构 |
6.2.2 车载以太网技术的应用
以太网以其通用性、开放性、高带宽、易扩展、易互联等特性,成为一种新型的车载网络,目前可以预期的车载以太网的发展可分为三个阶段。
1. 第一阶段;子系统级别
单独在某个子系统使用以太网,如图6-35所示。这一阶段的衍生产品目前已经在整车上实施,如基于 DoIP 标准的 OBD诊断设备;或已有实例应用,如使用IP摄像头的驾驶辅助系统。
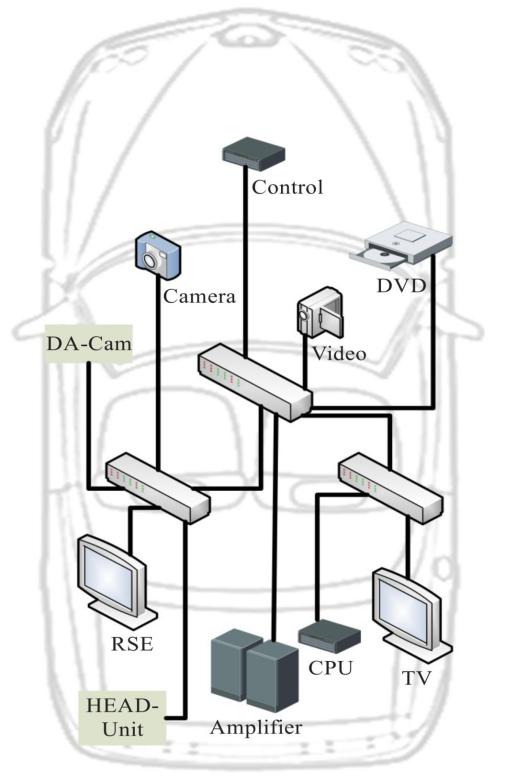
图6-34 树型结构
2. 第三阶段∶架构级别
将几个子系统功能整合,形成一个拥有功能集合的小系统,如图6-36 所示,将多媒体、驾驶辅助和诊断界面结合在一起,融合了传感器、全景摄像头及雷达等多种数据。因为可以保证更高的带宽和更低的延迟,在涉及安全方面的应用,摄像头可以使用更高分辨率的未压缩的数据传输,从而避免如压缩失真等导致障碍物检测失败的问题。
| |
| 图6-35 车载以太网子系统级别 | 图6-36车载以太网构架级别 |

图6-37显示了一种车载以太网应用场景,它将配备一个或多个节点,例如驾驶辅助系统、带高分辨率IP摄像头的全景停车场,以及多屏幕交互式高清信息娱乐系统。

图6-37 车载以太网应用场景
3. 第三阶段∶域级别
前两个阶段专注于一个特定的应用领域,第三阶段使用以太网为车载网络骨干,集成动力总成、底盘、车身、多媒体、辅助驾驶,真正形成一个域级别的汽车网络,如图6-38所示。有研究预计,以太网有望在 2020年成为主要的汽车网络技术,预计到 2025 年以太网可能更换所有其他的车载网络。
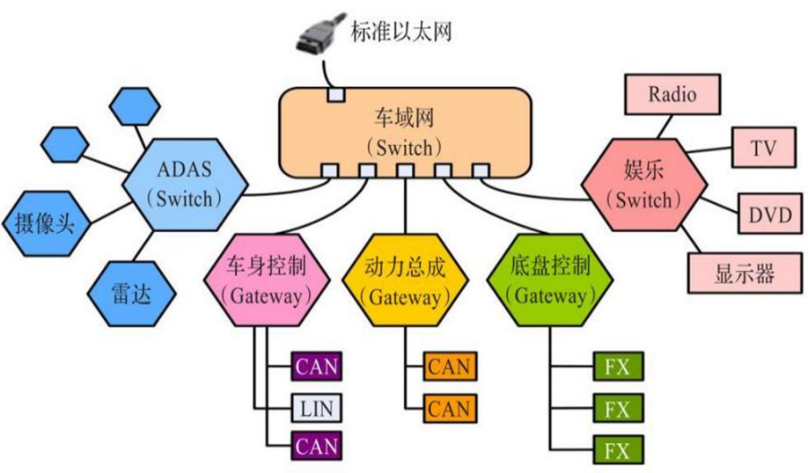
图6-38 车载以太网域级别构架
辅助驾驶系统可以采用以太网传输高清摄像头和高精度雷达数据,娱乐系统可以使用以太网传输视频和音频数据,车辆相关数据(车辆状态数据、道路环境高清视频数据、雷达数据)可以通过远程信息处理模块或V2X传输到外部云端平台、基站、数据控制中心等,车辆娱乐系统控制器可以通过4G/5G/Wi-Fi、蓝牙等方式下载音频和视频。
车载以太网TSN标准IEEE802.1DG
2010年后,IEEE着手将以太网全面升级为TSN网,这个过程可能要用20年时间。TSN即Time-Sensitive Networking,时间敏感网络,其应用范围很广,涵盖6个领域,分别是:
1) 以太网音视频桥即EAVB,802.1BA标准;
2) 5G射频前传FrontHaul,即802.1CM/de标准;
3) 工业自动化即IEC/IEEE 60802标准;
4)车载TSN即802.1DG标准;
5)服务供应商Service Provider即802.1DF标准;
6)航天Aerospace Onboard即IEEE P802.1DP/SAE AS6675标准。
其中,后面4个都是未完成,标准前会加“P”,比如车载TSN标准目前是P802.1DG,预计2024年全部完成。与TSN关系最密切的是车载以太网交换机芯片,无一例外,全球任何一家车载以太网交换机芯片都支持TSN,也必须支持。以太网交换机芯片也是智能驾驶和智能座舱必用芯片,以奔驰S级为例,每辆车至少有5片以太网交换机芯片。
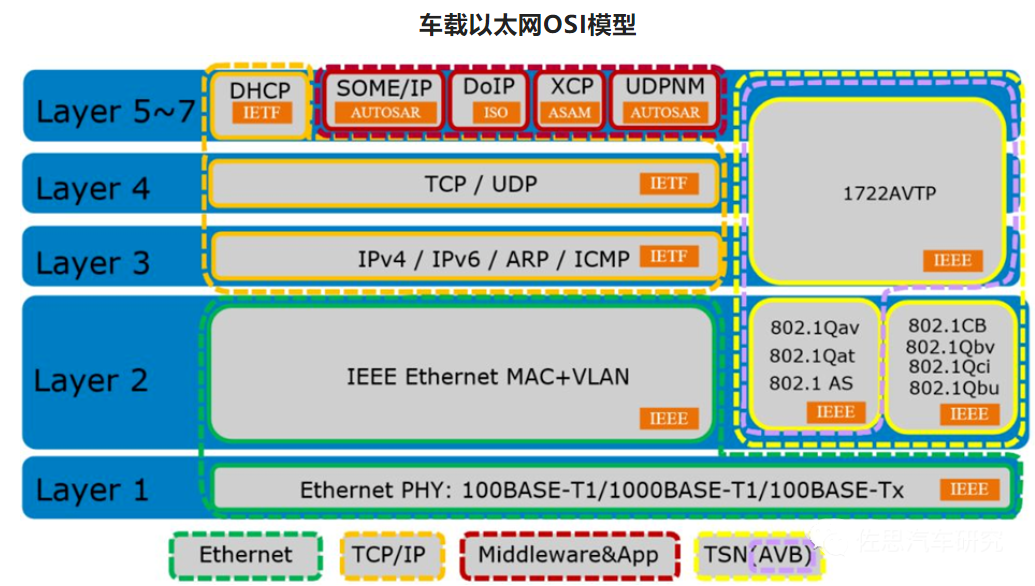
图6-39 车载以太网OSI模型
车载以太网标准分物理层PHY和链路层两大类,TSN标准主要在第二层的链路层。车载以太网PHY标准主要是制定单对双绞线标准,传统以太网与车载以太网最大不同是传统以太网需要2-4对线,车载以太网只需要一对,且是非屏蔽的,仅仅此一项,就可减少70%%-80%%的连接器成本,可减少30%%的重量。这是车载以太网诞生的最主要原因,同时也是为了满足车内的EMI电磁干扰。
表6-4 车载以太网PHY标准分布

车载以太网野心勃勃,10Base-T1S是试图取代传统CAN网络的。10Base-T1S即IEEE 802.3cg也就是OPEN Alliance的TC14,100Base-T1即IEEE 802.3bw也就是OPEN Alliance TC1,100/1000Base-T1 ECU测试标准即OPEN Alliance的TC8,1000Base-T1即IEEE 802.3bp也就是OPEN Alliance的TC12,2.5/5/10GBase-T1即IEEE 802.3ch也就是OPEN Alliance的TC15标准。超过10G带宽的802.3cy标准也在制定中。
TSN本身并非是一项全新的技术。IEEE于2002年发布了IEEE 1588精确时钟同步协议。2005年,IEEE 802.1成立了IEEE 802.1AVB工作组,开始制定基于以太网架构的音频/视频传输协议集,用于解决数据在以太网中的实时性、低延时以及流量整形的标准,同时又确保与以太网的兼容性。AVB引起了汽车行业、工业领域的技术组织及企业的关注。IEEE成立了TSN工作组,进而开发了时钟同步、流量调度、网络配置系列标准集。在这个过程中,由AVnu、IIC、OPC UA基金会等组织共同积极推进TSN技术的标准。工业领域的企业(包括B&R、TTTech、SEW、Schneider等)着手为工业领域的严格时间任务制定整形器,成立了整形器工作组,并于2016年9月在维也纳召开了第一次整形器工作组会议。而后,有更多的企业与组织(包括德国工业4.0组织LNI、美国工业互联网组织IIC、中国的边缘计算产业联盟ECC、工业互联网产业联盟AII等)加入TSN技术的研究,并构建了多个测试床。2019年,IEC与IEEE合作成立IEC 60802工作组,并在日本召开了第一次工作组会议,以便工业领域的TSN开发可以实现底层的互操作。同时,在OPC UA基金会也成立了(Field LevelCommunication,FLC)工作组,将TSN技术与OPC UA规范融合,以提供适用于智能制造、工业互联网领域的高带宽、低延时、语义互操作的工业通信架构。
与传统以太网比,TSN最大特色即确定性服务。
TSN信号传输流程
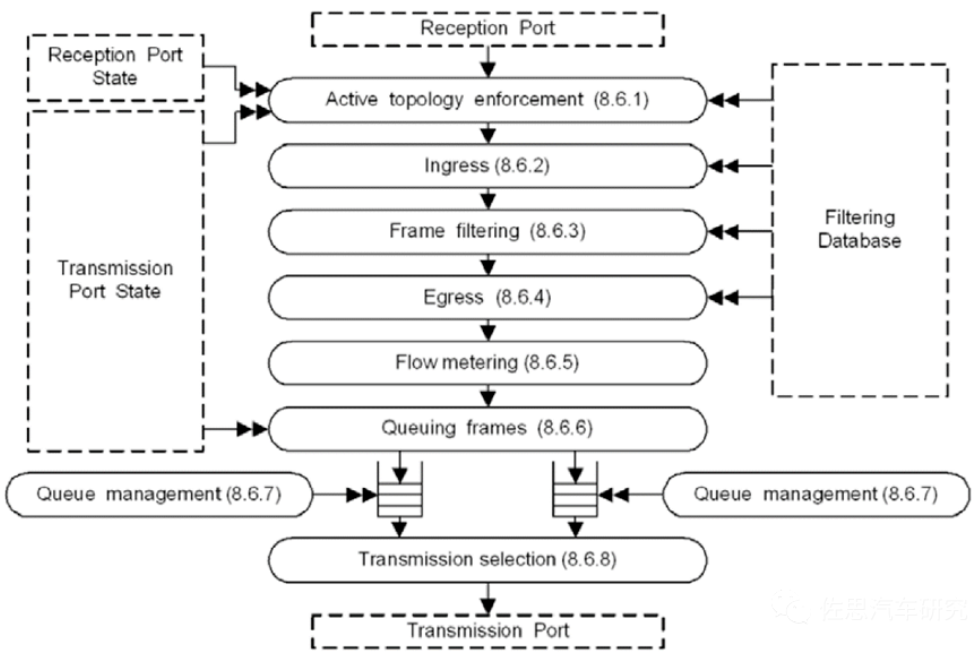
图 6-39 TSN信号传输流程
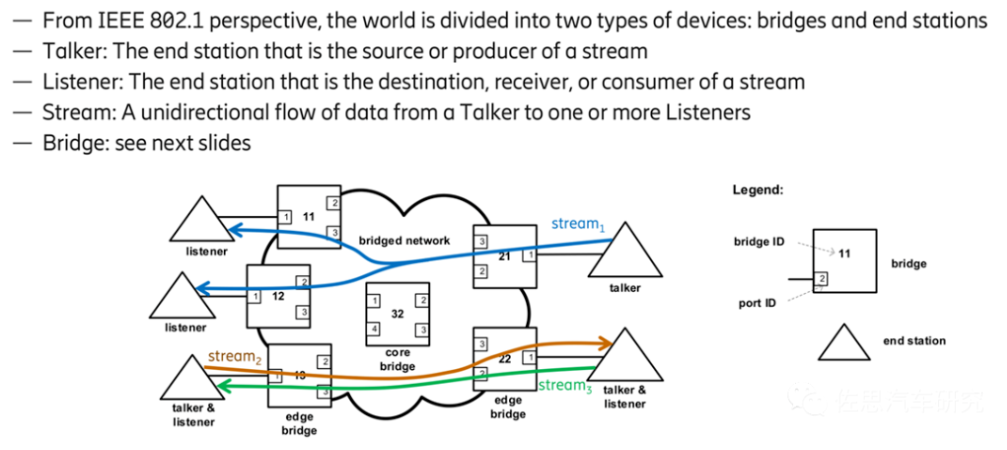
网络存在滤波数据库、传输端口状态监测、队列管理。这些都用于解决网络资源分配与调度问题。而IEEE 802.1Qat所采用的流预留协议(Stream Reservation Protocol,SRP)机制是一个对TSN进行配置的标准。SRP在于让网络中的发言者(Talker)用合适的网络资源将数据发送给听者(Listener),并在网络中传播这些信息。而在终端节点之间的网桥则维护一个发言者对一个或多个听者注册的相同数据流的路径带宽等资源的需求记录。
TSN基本概念
通过具体产品来了解一下TSN,与TSN关联度最高的是车载以太网交换机,车载以太网交换机厂家可分为两个梯队,第一梯队是美满电子(Marvell)和博通,都有最高支持802.3ch的产品。博通略强,价格较高,Marvell价格略低。博通产品线太长,Marvell比较聚焦汽车和企业网络领域,因此汽车市场Marvell市场占有率更高。第二梯队包括Microchip、NXP和瑞昱。最高仅支持802.3cg,NXP提供整体解决方案,比较聚焦汽车领域,市场占有率比较高。瑞昱主打高性价比,大众是其最大客户。这5家基本上垄断市场。
目前全球最先进的车载以太网交换机芯片是博通的BCM89586M,不仅支持最高10G的802.3ch,也支持最新的802.3cg。TSN方面支持IEEE 802.1AS 2020、IEEE802.1CB、IEEE 802.1Qbv和IEEE 802.1Qci,是目前TSN支持度最高的芯片。IEEE802.1AS 2020和IEEE 802.1Qbv是TSN必备要素,任何车载以太网交换机都必须支持。
IEEE 802.1AS 2020
所有通信问题均基于时钟,确保时钟同步精度是最为基础的问题,TSN工作组开发基于IEEE1588的时钟,并制定新的标准IEEE802.1AS-Rev。它用于实现高精度的时钟同步。对于TSN而言,其最为重要的不是“最快的传输”和“平均延时”,而是“最差状态下的延时”—这如同“木桶理论”,系统的能力取决于最短的那块板,即,对于确定性网络而言,最差的延时才是系统的延时定义。
IEEE1588协议,又称PTP(Precise TimeProtocol,精确时间协议),可以达到亚微秒级别时间同步精度,于2002年发布version 1,2008年发布version2。其主要原理是通过一个同步信号周期性地对网络中所有节点的时钟进行校正同步,可以使基于以太网的分布式系统达到精确同步,IEEE 1588PTP时钟同步技术也可以应用于任何组播网络中。
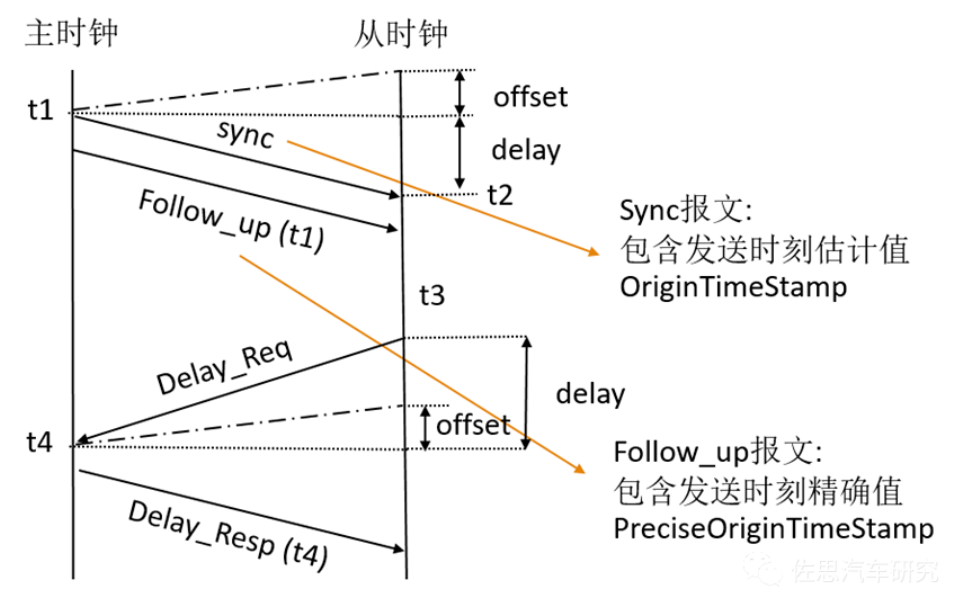
图6-40 IEEE1588协议的同步原理
IEEE1588协议的同步原理,所提出的Delay Request-ResponseMechanism(延时响应机制)如上图,IEEE1588把所涉及到的报文分为事件报文和通用报文,分类依据是:是否在收发报文时需要记录精确时间戳,根据上文中所描述的几种报文,可进行如下分类:
事件报文(event message)<收发时候需要记录精确时间戳>:sync/Delay_Req/Pdelay_Req/Pdelay_Resp。
通用报文(general message)<收发时候不需要几率精确时间戳>:Announce/Follow_up/Delay_resp/Pdelay_Resp_Follow_Up/Magnament/Signaling。Pdelay_Req/Pdelay_Resp/Pdelay_Resp_Follow_Up通过peer延迟机制测量两个时钟端口之间的链接延时,链接延时被用来更正Sync和Follow_Up报文中的时间信息。
IEEE802.1AS-Rev是为以太网第二层所定义的1588规范加以扩展,它的扩展包括了所有域常用peer延迟服务,支持精细时间测量FTM,对链路聚合(802.1AX)的支持,改善的使用范围-包括1步时间戳标准化处理以及针对长链、环的支持,更好的响应能力,这包括了更快的主站交互、降低BMCA收敛时间。另外IEEE802.1AS-Rev支持了多域的同步信息传输以及冗余支持能力(可配置冗余路径和冗余主站)。
TSN中保证高可靠性主要依靠802.1CB标准。这也是无人驾驶必须用TSN的主要原因,也只有TSN能让整个系统达到功能安全的最高等级ASIL D级。同样,与自适应AUTOSAR的捆绑程度也比较高。
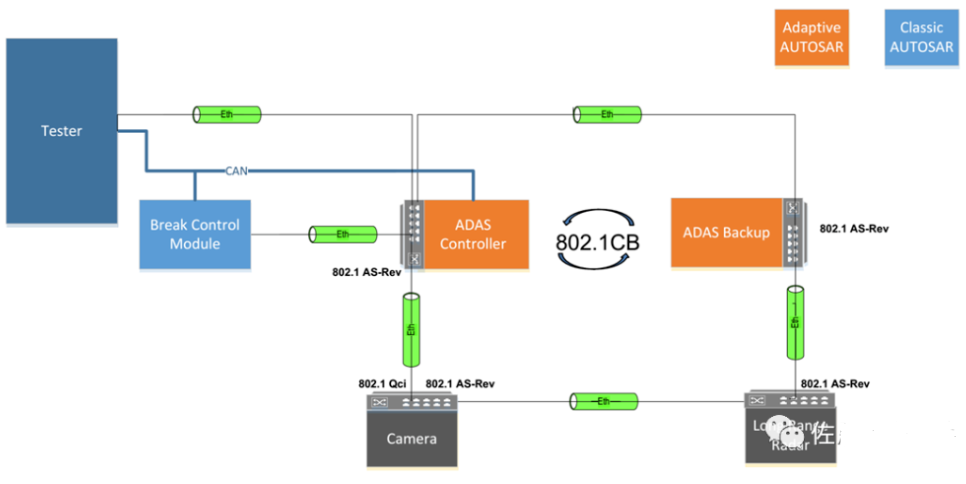
图6-41 IEEE802.1CB 标准
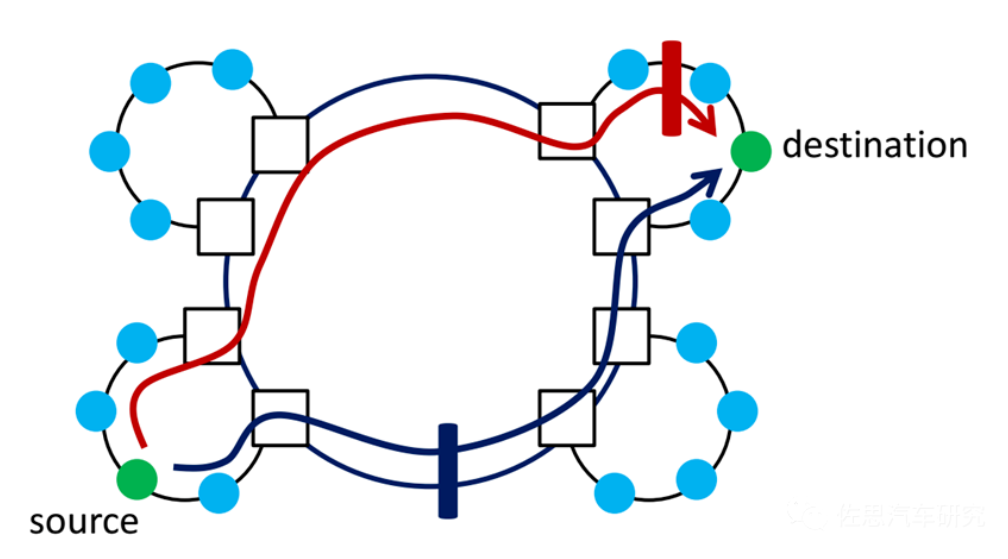
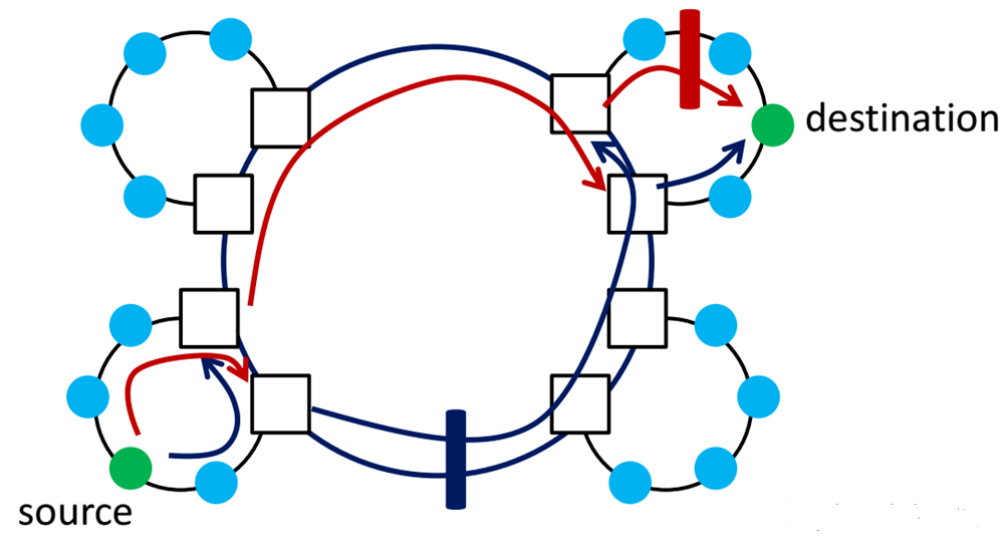
众所周知,L4级无人驾驶需要一个冗余处理器,但是主处理系统和冗余处理系统之间的通讯机制如何建立?这就是802.1CB的用武之地了。802.1CB是两套系统间的冗余,芯片之间的冗余还是多采用PCIe交换机的多主机fail-operational机制,两者有相似之处。
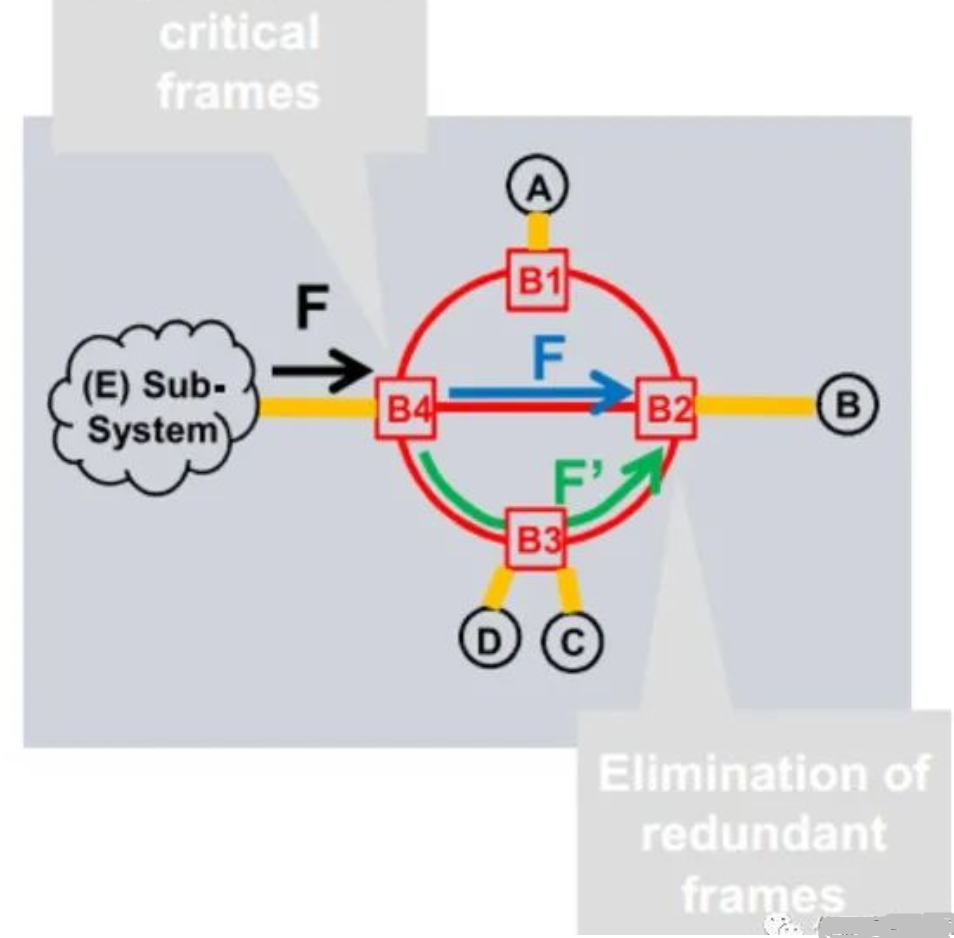
图6-42 802.1CB是两套系统间的冗余
对于非常重要的数据,802.1CB会多发送一个数据备份,这个备份会沿着最远离主数据路径交集的路径传输。如果两个数据都接收到,在接收端把冗余帧消除,如果只接收到一帧数据,那么就进入后备模式。在ISO/IEC 62439-3中已经定义了PRP和HSR两种冗余,这种属于全局冗余,成本较高,802.1CB只针对关键帧做冗余,降低了成本。802.1CB标准的制定主要依靠思科和博通。
802.1CB也可以缩写为FRER
Frame Replication and Elimination for Reliability(FRER)
1.Provide a sequence number for every packet in the 1.P stream.
2. Replicateeach packet, and send the replicated streams over two (or more) fixed paths towardsthe destination(s).
- Pathsmay be set up statically or with ISIS, but once set up, they do not shift withlink failures.
3. Near the destination(s), keep track ofwhat packets have and have not been seen, and eliminate the duplicates.
- Thatis, the receiver does not switch between streams. It looks at every packet toensure that exactly one copy of passed on.
FRER不仅能提供双失效冗余,也可以提供多失效冗余。
IEEE802.1Qbv
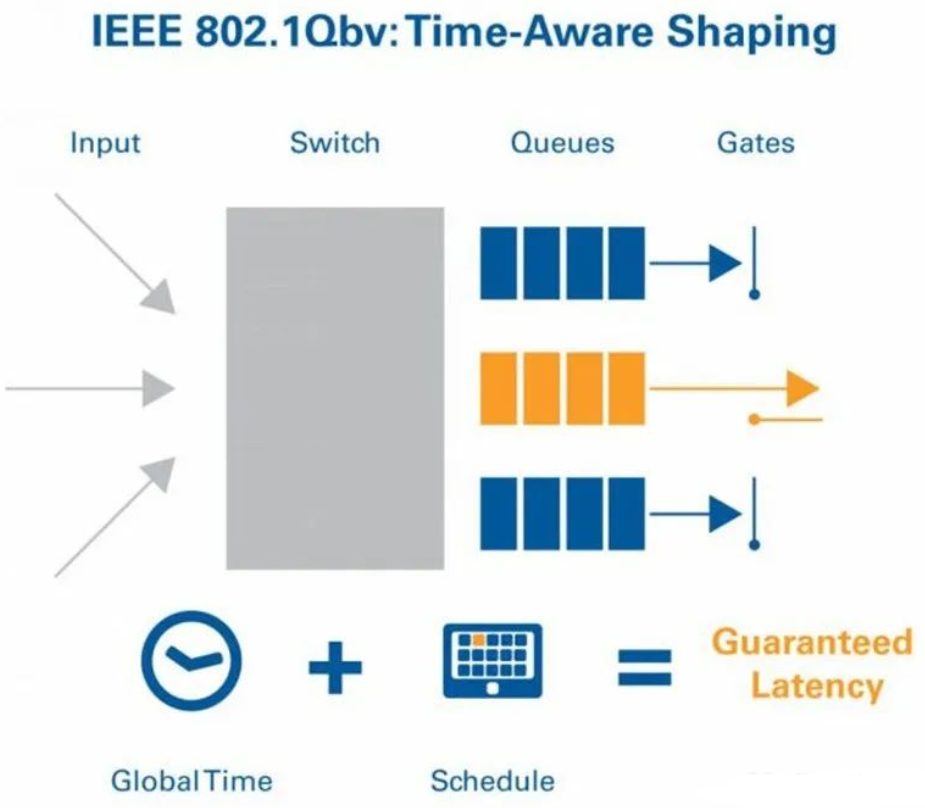
通过时间感知整形器(Time Aware Shaper)使TSN交换机能够来控制队列流量(queuedtraffic),以太网帧被标识并指派给基于优先级的VLAN Tag,每个队列在一个时间表中定义,然后这些数据队列报文的在预定时间窗口在出口执行传输。其它队列将被锁定在规定时间窗口里。因此消除了周期性数据被非周期性数据所影响的结果。这意味着每个交换机的延迟是确定的、可知的,而在TSN网络的数据报文延时得到保障。TAS介绍了一个传输门概念,这个门有“开”、“关”两个状态。传输的选择过程-仅选择那些数据队列的门是“开”状态的信息。而这些门的状态由网络时间进度表networkschedule进行定义。对没有进入networkschedule的队列流量关闭,这样就能保障那些对传输时间要求严格的队列的带宽和延迟时间。TAS保障时间要求严苛的队列免受其它网络信息的干扰,但它未必带来最佳的带宽使用和最小通信延迟。当优先级非常高时,抢占机制可以被使用。
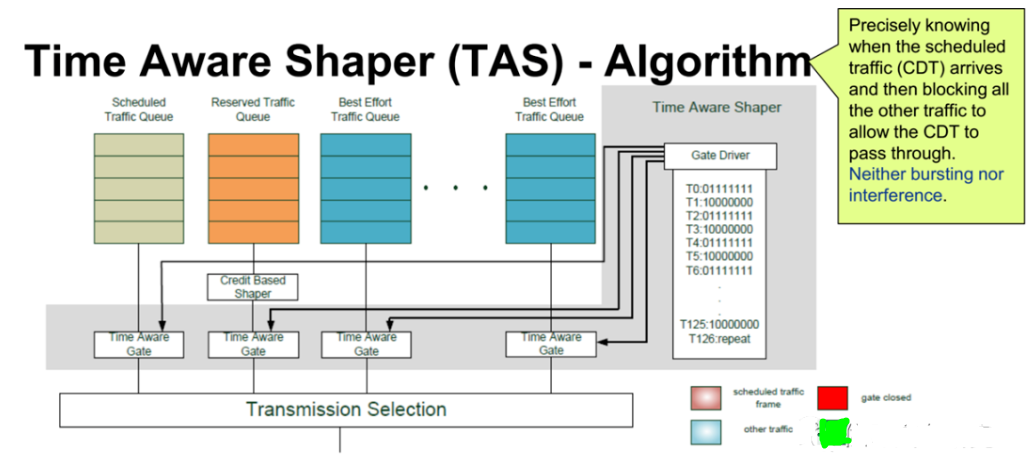
图6-45 时间感知整形器(Time Aware Shaper)
在网络进行配置时队列分为Scheduled Traffic、Reserved Traffic、BestEffort Traffic三种,对于Schedule而言则直接按照原定的时间规划通过,其它则按优先级,Best Effort通常排在最后。Qbv主要为那些时间严苛型应用而设计,其必须确保非常低的抖动和延时。Qbv确保了实时数据的传输,以及其它非实时数据的交换。
对于特别重要的数据,TSN规定了一个抢占机制,它由802.1Qbu/802.3br共同构成。对于IEEE802.1Qbu的抢占而言,正在进行的传输可以被中断,报文按等级可被分为可被抢占和抢占帧,抢占生成框架,最小以太网帧受到保护的,127字节的数据帧(或剩余帧)不能被抢占。IEEE802.1br定义了,设计了快速帧的MAC数据通道,可以抢占PreemptableMAC的数据传输。IEEE802.3br也同样可以与IEEE802.1Qbv配合进行增强型的数据转发。
802.1Qci
IEEE802.1Qci全称Per-StreamFiltering and Policing(以下使用简称PSFP),即对每个数据流采取过滤和控制策略,以确保输入流量符合规范,从而避免由故障或恶意攻击(如Dos攻击)引起的异常流量问题。
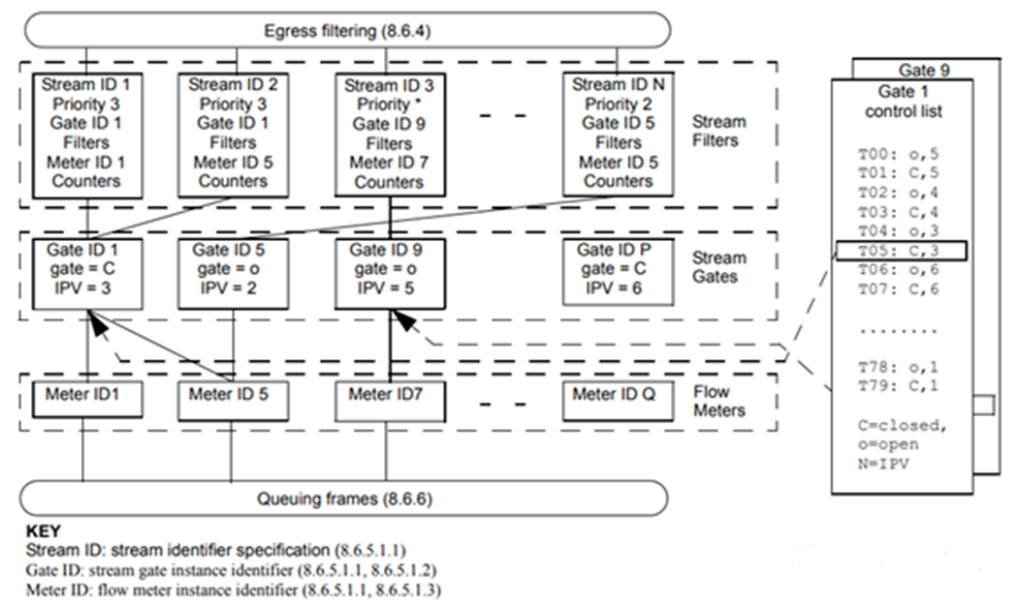
图6-45 对每个数据流采取过滤和控制策略
PSFP由图中Stream Filters、Stream Gates和Flow Meters三个表配合完成:
StreamFilters,即流过滤器表,每个表项表示某个流对应的过滤器,与特定门控(Gate)和流量计(Meter)关联;
StreamGates,即流门控表,每个表项表示对某个流采取的门控措施(如,门控状态为关表示禁止对应流量流入);
FlowMeters,即流量计表,每个表项表示对某个流的流量统计,当该流量超过了限制带宽则采取限流或阻断的控制。对于未知来源的流量,PSFP通过设置门控关闭,阻止可疑流量流入;对于已知来源的异常流量,这里的异常表现不限于带宽(带宽超出预留带宽),还包括如:最大服务数据单元(SDU)长度超出要求等,PSFP可以选择阻断或限流;
TSN标准能够推广关键在于上游厂家的鼎力支持,任何人想另起炉灶都绝不可能,五大车载以太网交换机厂家是无法绕开的,要想推广标准,芯片厂家是决定性因素。

