
视觉传感器的种类和原理
视觉传感器成本低廉,获取的环境信息直观,在车载领域得到了广泛应用,比如目前见的倒车影像和360°全景环视系统,都使用了鱼眼摄像头。同时,随着各类图像处理方的发展,以及图像处理芯片成本的持续降低,使用视觉传感器实时获取环境信息成为一可行的车载应用方案。因此,视觉传感器成为目前智能网联汽车广泛使用的传感器。目前,具备图像识别能力的视觉传感器主要是前视摄像头,如图2-1所示。
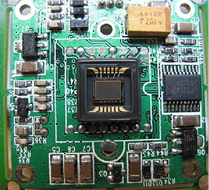
视觉传感器又称为成像装置或摄像装置,是智能车辆路径识别模块中摄像头的重要组部分,可以检测可见光、紫外线、X射线、近红外光等,实现视觉功能的信息采集、转和扩展,提供可视化、真实、多级、多内容的视觉图像信息。图像传感器控制芯片如 2-2所示,按安装位置分,有前视、后视和环视;按镜头类型分,有长焦、鱼眼;按传感器的原理分,有单目可见光、双目可见光和红外夜视等多种类型。
|
|
|
| 图2-1 车载前视摄像头 | 图2-2 图像传感器控制芯片 |

视觉传感器的感知核心是电荷耦合元件(Charge-coupled Device,CCD),是一种半导体器件,能够把光学影像转化为数字信号。CCD上植入的微小光敏物质称为像素(Pixel)。一块CCD上包含的像素数越多,其提供的画面分辨率也就越高。CCD的作用就像胶片一样,但它是把光信号转换成电荷信号。CCD上有许多排列整齐的光电二极管,能感应光线,并将光信号转换成电信号,经外部采样放大及模数转换电路转换成数字图像信号。CCD作为一种新型的光电转换器,现已被广泛应用于摄像、图像采集、扫描仪以及工业测量等领域。CCD图像传感器可分为两类∶一类用于获取线阵图像,称为线阵 CCD;另一类用于获取表面图像,称为面阵 CCD。对于线阵 CCD,它可以直接接收一维光学信息,但是不能直接将二维图像转换成一维电信号输出,为了获得整个二维图像的输出,必须采用线扫描方法来实现。面阵 CCD的感光单元以二维矩阵排列,可以检测二维平面图像。
涂在CCD表面的硅半导体光敏器件捕获光子并产生光生电子,这些电子首先聚集在 CCD下的绝缘层中,然后由控制电路串行输出到模拟电路,再通过成像电路(如DSP)进行传输形成一个图像。
视觉传感器的镜头和CCD将获取到的光信号转换为可以由计算机处理的图像编码后,内部的光敏元件电路和控制元件对图像编码进行处理,并将其转换成控制单元可处理的数字信号,进一步使用各类图像处理算法从图像中提取并跟踪相关特征,即可实现对车辆周围路况的识别,为决策系统做出前方碰撞警告、车道偏移报警和行人检测等提供有效的环境感知信息。
单目摄像头、双目立体摄像头、红外摄像头是目前在汽车上应用比较广泛的视觉传感器,它们的检测原理、处理算法及特点各有不同,下面分别介绍这几种典型的车载视觉传感器。

