高新科技的开发
-
1.1前 言
-
1.2生物技术领域
-
1.2.1生物技术的核心——基因工程
-
1.2.2医学史上的里程碑——试管婴儿
-
1.2.3无性繁殖技术——克隆
-
1.2.4克服人类的恐慌——治愈疯牛病
-
1.2.5航天育种技术
-
1.2.6破译遗传的密码——DNA
-
1.2.7输血不再辉煌——人造血和人造血液的诞生
-
1.2.8延长寿命的法宝——器官移植术
-
1.3航天技术领域
-
1.3.1无人驾驶的飞机
-
1.3.2奇异的水上飞机
-
1.3.3最大的军舰——航空母舰
-
1.3.4战场上的空中“大力士”
-
1.3.5反太空武器的拦截卫星
-
1.3.6太空的新居所——空间站
-
1.3.7天上“交通警”——卫星导航
-
1.3.8太空探测者——人造卫星
-
1.3.9卫星遥感在气象中应用
-
1.4信息技术领域
-
1.4.1汽车的好保安——智能停车场
-
1.4.2神奇的电子鼻
-
1.4.3迷你雷达——小型千里眼巡逻好帮手
-
1.4.4火眼金睛——CT透视仪
-
1.4.5X光扫描汽车系统安检透视眼
-
1.4.6智能雷弹
-
1.4.7闻所未闻的新奇武器
-
1.4.8第三代移动通信技术——3G
-
1.4.9弹道导弹防御系统
-
1.5激光技术领域
-
1.5.1“第二原子弹”——电磁脉冲武器
-
1.5.2等离子体技术
-
1.5.3激光光谱
-
1.5.4激光照排技术
-
1.5.5无线激光笔
-
1.5.6现代化烹调灶具——微波炉
-
1.5.7激光美容技术
-
1.6自动化技术领域
-
1.6.1高新技术的基础——电脑技术
-
1.6.2方寸芯片创奇迹
-
1.6.3完美复制——静电复印纸
-
1.6.4人机对话与语言——条形码
-
1.6.5现代通讯技术
-
1.6.6数字图书馆
-
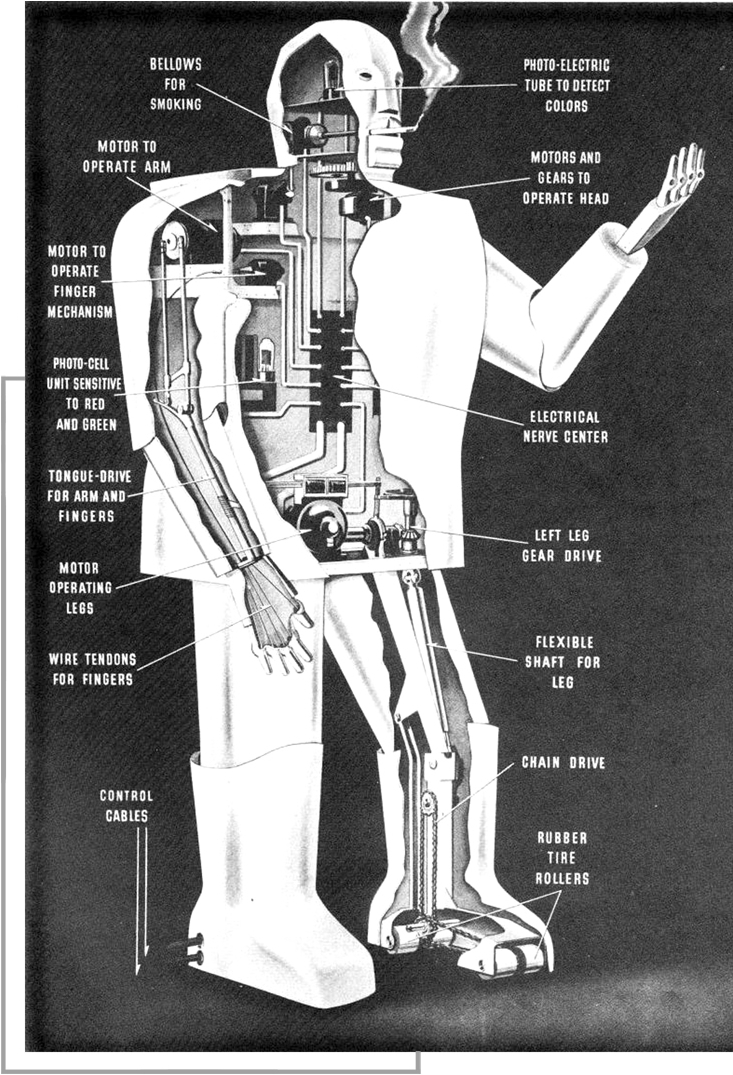
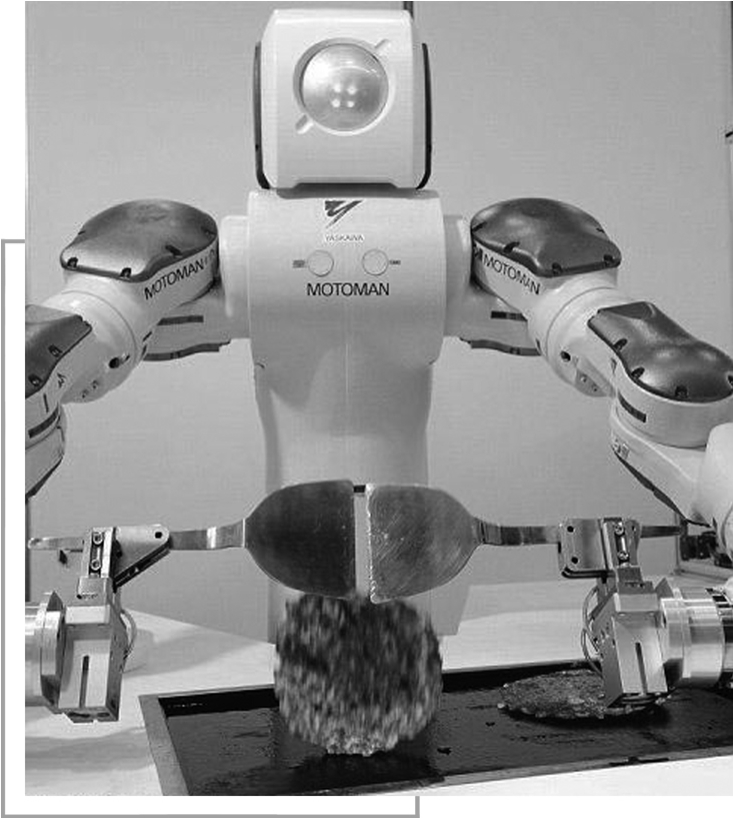
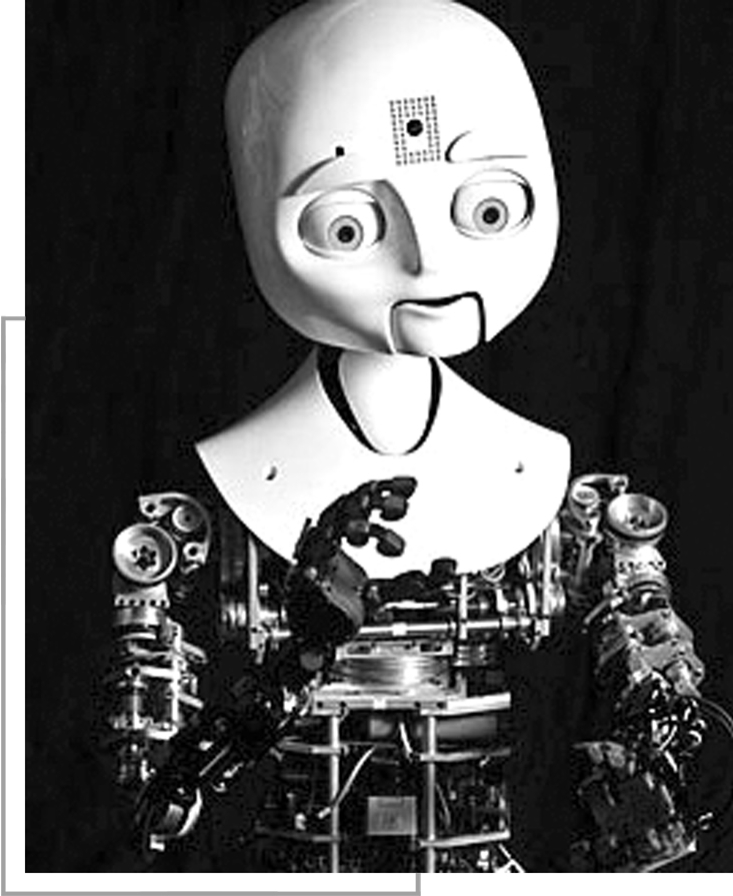
1.6.7神奇的机器人
-
1.6.8人工智能——AI
-
1.6.9微型传感器——智能微尘
-
1.6.10磁 卡
-
1.7能源技术领域
-
1.7.1把煤变成石油的技术
-
1.7.2细菌造油
-
1.7.3使石头出油的技术
-
1.7.4树产生石油的技术
-
1.7.5利用太阳能造电池
-
1.7.6用水开汽车的技术开发
-
1.7.7让工厂“吃”垃圾的技术
-
1.7.8核聚变能的技术开发
-
1.7.9雪能发电吗
-
1.7.10束能的技术领域
-
1.7.11燃煤磁流体发电技术
-
1.7.12先进核反应堆技术
-
1.7.13“脏弹”到底有多可怕
-
1.8新材料领域
-
1.8.1巧小轻便——纳米材料
-
1.8.2光纤材料
-
1.8.3激光材料
-
1.8.4超导材料
-
1.9海洋技术领域
-
1.9.1现代海军“舰艇家族”主要成员
-
1.9.2特种部队必备“利器”——浅海潜艇
-
1.9.3海洋遥感
-
1.9.4海洋导航技术
-
1.9.5深海探测技术
-
1.9.6海水淡化技