智能的机器:机器人
-
1.1科学是一种世界观
-
1.2000
-
1.3第一章 “新新人类”——机器人
-
1.3.1第一节 智定一生——机器人
-
1.3.1.11.智能仿生——机器人
-
1.3.1.22.以小见大——机器人的结构组成
-
1.3.1.33.变形金刚——机器人的“身体”部件
-
1.3.2第二节 追古溯今——机器人发展史
-
1.3.2.11.历史印迹——古代机器人
-
1.3.2.22.承前启后——现代机器人
-
1.4第二章 种类繁杂——机器人的分类
-
1.4.1第一节 生产能手——工业机器人
-
1.4.1.11.工业机器人的构造与分类
-
1.4.1.22.我国的工业机器人产业
-
1.4.1.33.工业机器人的应用
-
1.4.2第二节 生活助手——服务机器人
-
1.4.2.11.方便快捷——医用机器人
-
1.4.2.22.实用灵活——康复机器人
-
1.4.2.33.高大威猛——清洁机器人
-
1.4.2.44.一机多能——家政服务机器人
-
1.4.2.55.安全卫士——保安机器人
-
1.4.2.66.风光无限——导游机器人
-
1.4.2.77.火海“勇士”——消防机器人
-
1.4.2.88.助人脱困——救援机器人
-
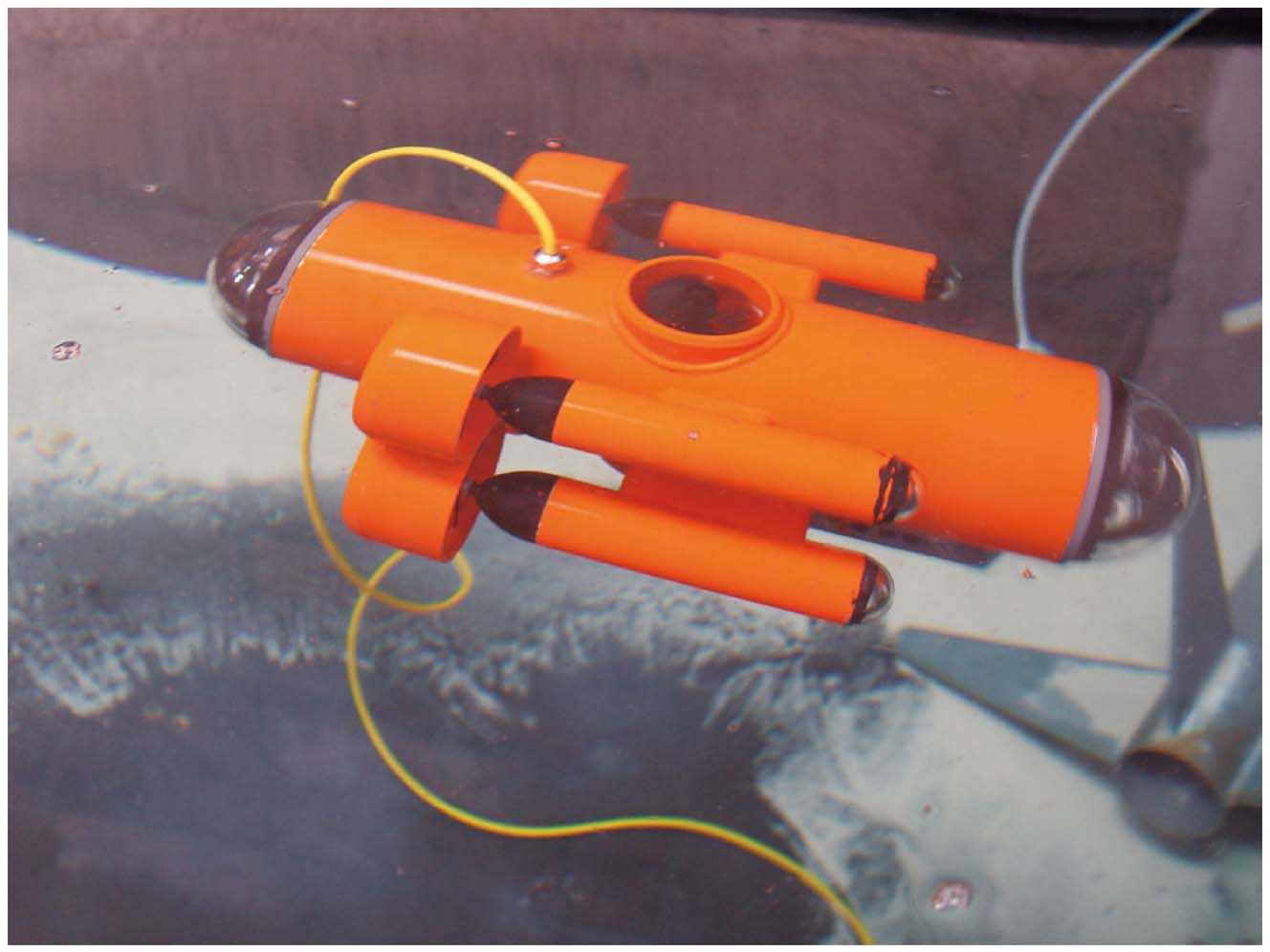
1.4.3第三节 水中健将——水下机器人
-
1.4.3.11.深水“蹦极”——无人有缆潜水器
-
1.4.3.22.技高一筹——无人无缆潜水器
-
1.4.3.33.记录历史——水下6000米无缆自治机器人
-
1.4.4第四节 战争骄子——军用机器人
-
1.4.4.11.身手敏捷——排爆机器人
-
1.4.4.22.昼夜潜伏——侦察机器人
-
1.4.4.33.不畏艰险——水下扫雷机器人
-
1.4.4.44.腾云驾雾——空中机器人
-
1.4.4.55.太空畅游——空间机器人
-
1.4.5第五节 劳动之友——农林业机器人
-
1.4.5.11.分工细致——田间农业机器人
-
1.4.5.22.事半功倍——采摘机器人
-
1.4.5.33.好坏分明——分拣机器人
-
1.4.5.44.园艺高超——嫁接机器人
-
1.4.5.55.不同凡响——采集机器人
-
1.4.5.66.挖掘能手——伐根机器人
-
1.4.5.77.进退自如——喷药机器人
-
1.4.6第六节 快乐天使——娱乐机器人
-
1.4.6.11.大显身手——足球机器人
-
1.4.6.22.口若悬河——聊天机器人
-
1.4.6.33.表情丰富——宠物机器人
-
1.4.6.44.随波荡漾——鱼形机器人
-
1.4.6.55.挥毫泼墨——书法机器人
-
1.4.6.66.惟妙惟肖——音乐演奏机器人
-
1.4.6.77.风靡日本——机器人相扑大赛
-
1.5第三章 相濡以沫——机器人与人类
-
1.5.1第一节 傲慢与偏见——人类的困惑
-
1.5.1.11.心存疑虑——机器人和人是否能友好相处
-
1.5.1.22.自我否定——“更深的蓝”战胜了什么
-
1.5.1.33.和谐相处——机器人是人类的助手和朋友
-
1.5.2第二节 未来之路——机器人研究前沿