建筑力学
-
1.1前言
-
1.1.1模块1 建筑力学的研究对象和任务
-
1.1.1.11.1 建筑力学的研究对象
-
1.1.1.21.2 建筑力学的研究任务
-
1.1.1.31.3 建筑力学学习要点
-
1.1.2模块2 建筑力学的基本内容和作用
-
1.1.2.12.1 建筑力学的内容
-
1.1.2.22.2 建筑力学的作用
-
1.1.3模块3 建筑结构类型及结构简化
-
1.1.3.13.1 建筑结构类型
-
1.1.3.23.2 结构的简化
-
1.2项目1 建筑力学基本概念
-
1.2.1模块1 内力与应力
-
1.2.1.11.1 内力的概念及分类
-
1.2.1.21.2 应力
-
1.2.2模块2 变形固体基本假设
-
1.2.2.12.1 刚体
-
1.2.2.22.2 变形固体
-
1.2.3模块3 杆件变形的基本形式
-
1.2.3.13.1 轴向拉伸或压缩
-
1.2.3.23.2 剪切
-
1.2.3.33.3 扭转
-
1.2.3.43.4 弯曲
-
1.2.4模块4 材料应变及胡克定律
-
1.2.4.14.1 线应变
-
1.2.4.24.2 切应变
-
1.2.4.34.3 胡克定律
-
1.2.5模块5 建筑荷载及分类
-
1.2.5.15.1 荷载的分类
-
1.2.5.25.2 荷载的简化和计算
-
1.3项目2 静力学基础知识
-
1.3.1模块1 力的基本知识
-
1.3.1.11.1 力的概念
-
1.3.1.21.2 力对点之矩
-
1.3.1.31.3 力偶的概念及性质
-
1.3.2模块2 物体的受力与结构计算简图简化分析
-
1.3.2.12.1 约束和约束反力
-
1.3.2.22.2 结构计算简图简化分析
-
1.3.2.32.3 物体受力分析和受力图绘制
-
1.3.3模块3 平面力系的平衡条件
-
1.3.3.13.1 平面力系向一点的简化方法
-
1.3.3.23.2 平面力系的平衡方程及其应用
-
1.3.4模块4 物体系统的平衡问题
-
1.3.5模块5 平面杆件体系的几何组成分析
-
1.3.5.15.1 概述
-
1.3.5.25.2 几何不变体系的组成规则
-
1.3.6模块6 平面杆件结构介绍
-
1.3.6.16.1 梁
-
1.3.6.26.2 刚架
-
1.3.6.36.3 桁架
-
1.3.6.46.4 组合结构
-
1.3.6.56.5 拱
-
1.4项目3 静定结构内力分析
-
1.4.1模块1 轴向拉(压)杆内力计算
-
1.4.1.11.1 拉(压)杆的概念
-
1.4.1.21.2 轴力与轴力图
-
1.4.2模块2 梁的内力计算
-
1.4.2.12.1 梁的平面弯曲的概念
-
1.4.2.22.2 梁的内力——剪力和弯矩
-
1.4.2.32.3 单跨静定梁的内力图
-
1.4.2.42.4 多跨静定梁
-
1.4.3模块3 平面刚架、桁架及三铰拱的内力计算
-
1.4.3.13.1 静定平面刚架
-
1.4.3.23.2 静定平面桁架
-
1.4.3.33.3 三铰拱
-
1.4.4模块4 平面组合结构内力计算
-
1.4.5*模块5 受扭杆件内力计算
-
1.4.5.15.1 扭转的概念
-
1.5项目4 静定结构位移计算
-
1.5.1模块1 结构位移的概念
-
1.5.1.11.1 结构的位移
-
1.5.1.21.2 位移计算的目的和方法
-
1.5.2模块2 单位荷载法
-
1.5.2.12.1 虚功
-
1.5.2.22.2 虚功原理
-
1.5.2.32.3 位移计算的一般公式
-
1.5.2.42.4 虚单位荷载的设置
-
1.5.2.52.5 静定结构在荷载作用下的位移计算
-
1.5.3模块3 图乘法
-
1.5.3.13.1 图乘法适用条件及图乘法公式
-
1.5.3.23.2 图乘法计算中的几个问题
-
1.6项目5 杆件强度、刚度与稳定性分析
-
1.6.1模块1 轴向拉(压)时材料的力学性能
-
1.6.1.11.1 材料拉伸时的力学性能
-
1.6.1.21.2 材料压缩时的力学性能
-
1.6.2模块2 轴向拉压杆的强度条件
-
1.6.2.12.1 许用应力与安全系数
-
1.6.2.22.2 轴向拉压杆的强度条件
-
1.6.3模块3 平面弯曲梁的强度条件
-
1.6.3.13.1 梁的正应力强度条件
-
1.6.3.23.2 梁的切应力强度条件
-
1.6.4模块4 平面组合结构的强度条件
-
1.6.5模块5 梁刚度校核
-
1.6.5.15.1 刚度校核
-
1.6.5.25.2 提高梁刚度的措施
-
1.6.6模块6 压杆稳定性分析
-
1.6.6.16.1 基本概念
-
1.6.6.26.2 临界力和临界应力
-
1.6.7*模块7 受扭杆的强度与刚度条件
-
1.6.7.17.1 圆轴扭转时的强度条件及其应用
-
1.6.7.27.2 圆轴扭转时的刚度条件
-
1.7项目6 超静定结构内力分析
-
1.7.1模块1 力法
-
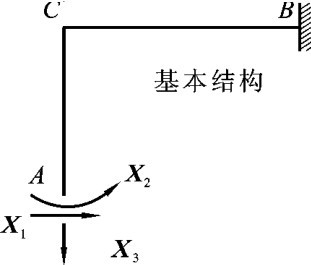
1.7.1.11.1 超静定结构的概念和超静定次数的确定
-
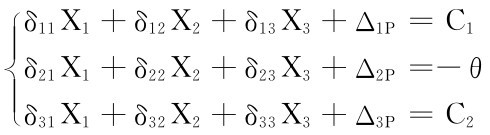
1.7.1.21.2 力法原理和力法方程
-
1.7.1.31.3 对称性的利用
-
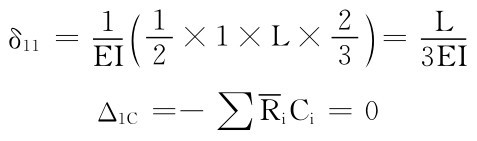
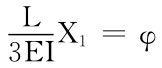
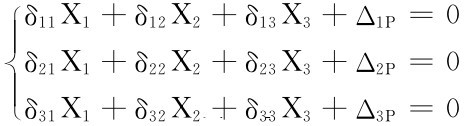
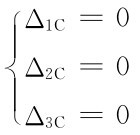
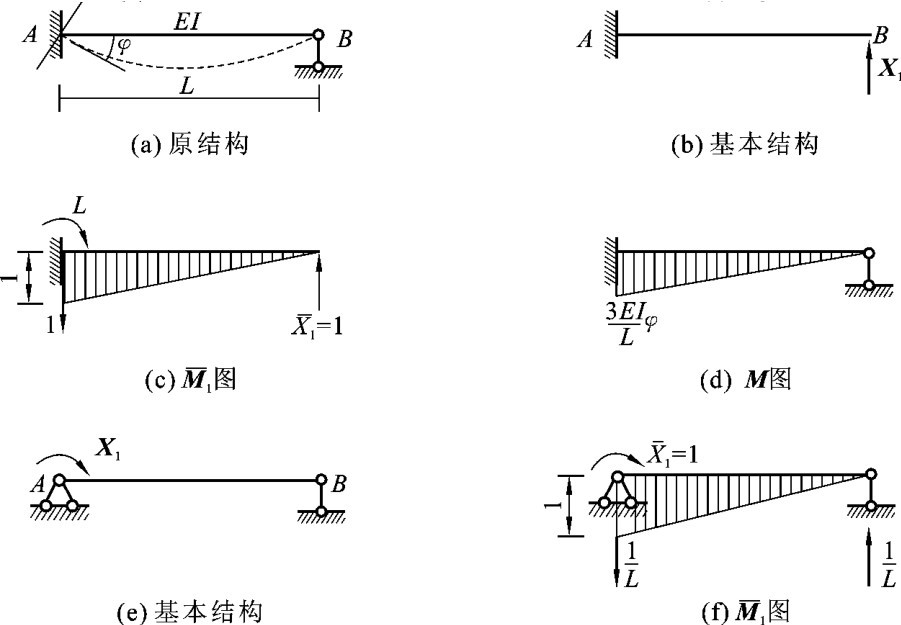
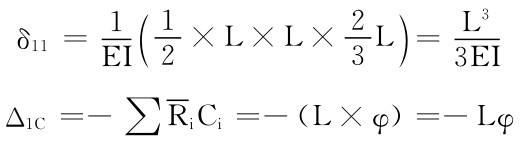
1.7.1.41.4 温度变化和支座移动时超静定结构的计算
-
1.7.1.51.5 超静定结构的位移计算和最后内力图的校核
-
1.7.1.61.6 超静定结构的特性
-
1.7.2模块2 位移法
-
1.7.2.12.1 概述
-
1.7.2.22.2 等截面直杆的转角位移方程
-
1.7.2.32.3 位移法基本未知量及基本结构
-
1.7.2.42.4 位移法典型方程及计算步骤
-
1.7.2.52.5 直接由平衡条件建立位移法基本方程
-
1.7.2.62.6 对称性的利用
-
1.7.3模块3 力矩分配法
-
1.7.3.13.1 基本概念
-
1.7.3.23.2 单结点力矩分配法——基本运算
-
1.7.3.33.3 多结点力矩分配法——渐进运算
-
1.8附录
-
1.8.1附录A 截面图形的几何性质
-
1.8.2附录B 常用型钢规格表
-
1.8.3附录C 简单荷载作用下简单梁的内力图
-
1.9参考文献




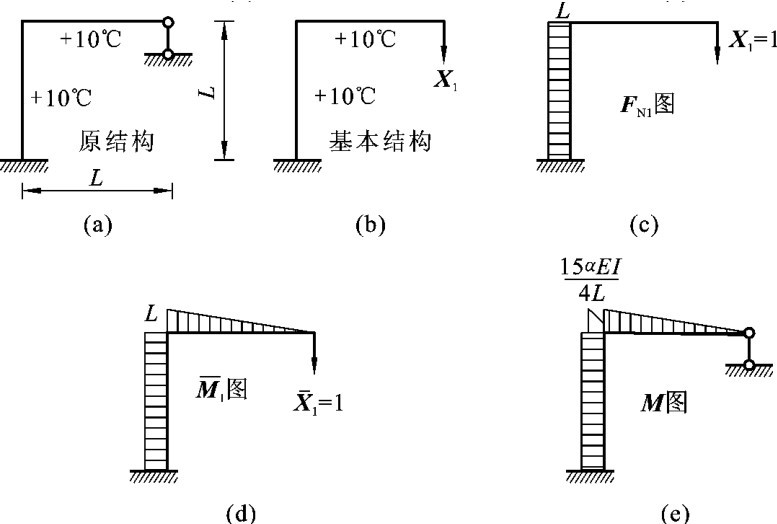
![δ=∫M21 ds=1 EIEI (L2×L+L22×23)L=4L33EI Δ1t=∑(±)αt0ωNt+∑(±)αΔt hωNt )h3L(=-5αt01+[=-α×5×t+ -α×10L2+1 h (L2 2)]](http://p.ananas.chaoxing.com/star3/origin/02ecfc09f6628df7584e4984cb80d772.jpg)


 φ
φ