无人机飞行时,不仅需要具有一定的稳定性,还要求具有良好的操纵性。
所谓操纵性,是指无人机对操纵指令做出反应、改变其飞行状态的特性,也就是无人机按照飞行指令的意图做各种动作的能力。
操纵性的好坏与稳定性的大小密切相关。
稳定性太大,也就是说无人机保持原有平衡状态的能力越强,则要改变它也就越不容易,操纵起来也就越费劲。
若稳定性过小,则较小的操纵就能引起较大的状态变化,很难把握操纵量的大小,容易造成操纵过量。
因此,要正确处理好稳定性与操纵性之间的关系。
无人机的操纵性---以固定翼无人机为例
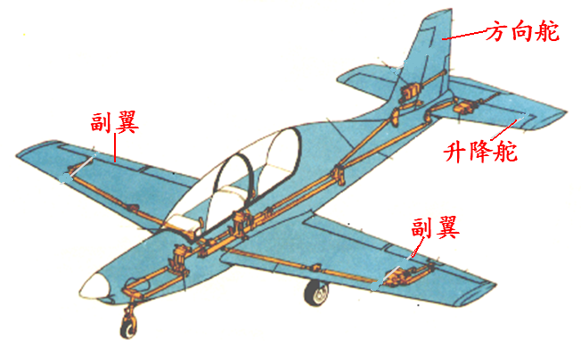
固定翼无人机飞行时的操纵,主要通过三个主操纵面——升降舵、方向舵和副翼来实现的。
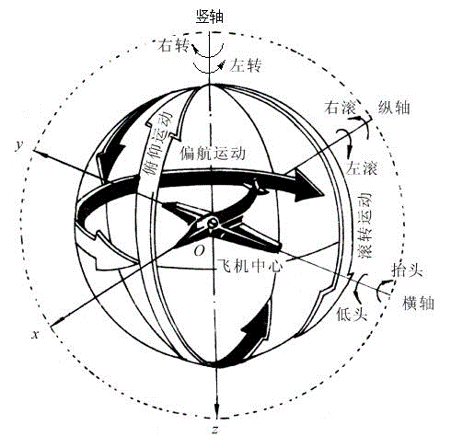
操纵手或者自动驾驶仪给出操纵指令,对操纵面进行偏转,使无人机绕其纵轴、横轴和竖轴转动,从而改变无人机的飞行姿态。
如果操纵手或者自动驾驶仪给出适当的操纵指令使操纵面偏转,无人机很快做出反应,按指令的意图改变飞行姿态,那么,无人机就具有良好的操纵性。如果反应迟钝,那就是操纵性不好。
固定翼无人机由于布局设计的不同,使用的操纵面有所差异,但其操纵的基本原理都相同,即通过操纵面的偏转改变升力面上的空气动力,增加或减少的空气动力相对于无人机重心产生一个使其按需要改变飞行姿态的附加力矩。


同稳定性一样,操纵性同样可分为:纵向操纵性;航向操纵性;横向操纵性;纵向操纵。
1、纵向操纵
当操纵手或者自动驾驶仪给出指令偏转升降舵(或全动平尾、升降副翼)之后,无人机绕横轴转动而改变其迎角、速度等飞行状态的特性,称为纵向操纵性。
固定翼无人机的纵向操纵,依靠升降舵或者全动平尾、升降副翼来进行。
在稳定飞行的情况下,操纵手或者自动驾驶仪给出指令,通过传动机构使升降舵或全动平尾向上偏转,使之产生一个向下的附加力ΔL1,ΔL1相对无人机重心O产生一个使无人机抬头的力矩ΔM1;在ΔM1作用下无人机绕横轴Oy转动并抬头,迎角增大,导致无人机的升力系数CL加大,升力随之增加并大于无人机重力,无人机开始爬升。
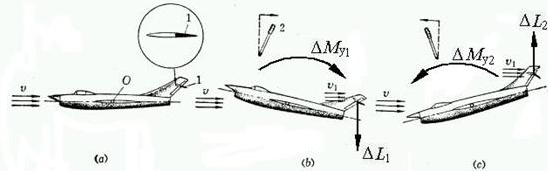
如果想让无人机低头下降,可以指令使升降舵向下偏转,从而改变尾翼的弯度(向上供起),使之产生一个向上的附加力ΔL2,ΔL2相对无人机重心O产生一个使无人机低头的力矩ΔM2,在ΔM2作用下无人机绕横轴Oy转动并低头,迎角减小导致无人机的升力系数CL减小,升力随之减小并小于无人机的重力,无人机开始下降。
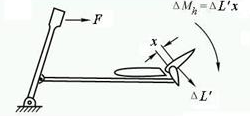
当舵面向上偏转时,舵面上产生的附加升力ΔL’对升降舵的旋转轴亦形成力矩ΔMh,通常称为铰链力矩。
对于有人驾驶飞机,为了保持舵面向上的偏角不变,驾驶员必须对驾驶杆作用一定的向后的拉力F,通常称为驾驶杆力。杆力的大小及其随速度的变化规律是衡量和评定操纵性好坏的一个最重要指标。
对于无人机,可使用舵面偏角对操纵指令的响应特性来衡量其操纵性优劣。
稳定性和操纵性是无人机飞行品质的重要组成。在无人机设计时,一方面要保证稳定飞行时,无人机能保持所希望的稳定平衡状态;另一方面,在需要改变飞行状态时,操纵指令能快速、准确的使无人机产生所期望的飞行状态变化。