重量是飞行器设计的重要参数,对飞行器飞行动力学性能有重要影响。
无人机相对常规有人飞行器而言,尺寸更小,承载能力也更为有限。因此,重量设计更是无人机设计中的关键环节。

由于地面装置重量要求相对比较宽松,重量设计通常主要计算无人机空中飞行平台的重量。
按照重量来源,无人机重量可分为:机体结构重量;动力装置重量;能源重量;系统设备重量;有效载荷(任务设备)重量。
上述各项重量之和,即无人机的起飞重量,是无人机重量设计中的重要参数:

起飞重量又可分为“空机重量”和“有效载荷”两部分。

对于油动无人机,常把“能源重量/燃油重量”从“空机重量”中分出单独列出。
对于电动无人机,因为电池在使用过程中其重量几乎不变,因此“空机重量”一般包括“能源重量”。
有时为了考虑续航时间,也有把“电池重量”单独列出。需要说明的是,微小型无人机为了减重,往往动力能源和系统设备供电共用一组电池。

重量设计是决定无人机设计成败的重要因素。重量设计首先要进行重量分析,其次对无人机各部分进行重量分配,然后需对无人机各分系统的具体设计和制造进行严格的重量控制。
 1、重量分析
1、重量分析
重量分析最基础的任务是确定起飞重量,这主要受制于飞行器最大尺寸约束。
对于固定翼无人机而言,实际约束为机翼面积所能产生的升力。 根据升力公式,升力与速度平方成正比:
因此,起飞重量同时与起飞速度和巡航速度要求密切相关。
2、重量分配
在起飞重量的限制下,对无人机各部分进行重量分配是设计的关键。
由于无人机的形式多变和技术成熟度,尚没有可供各分系统重量的估算公式和分配比例。
尤其在微小型无人机中,普遍使用微型动力装置和微机电系统,这些都依赖于在不断发展中的微系统技术。可以说现时微系统技术的水平决定了微小型无人机内部系统的重量。
在起飞总量下如何分配和平衡各分系统的重量,一方面取决于微机电元器件的重量,另一方面与飞行性能的要求(主要是“续航时间”)关系极大。
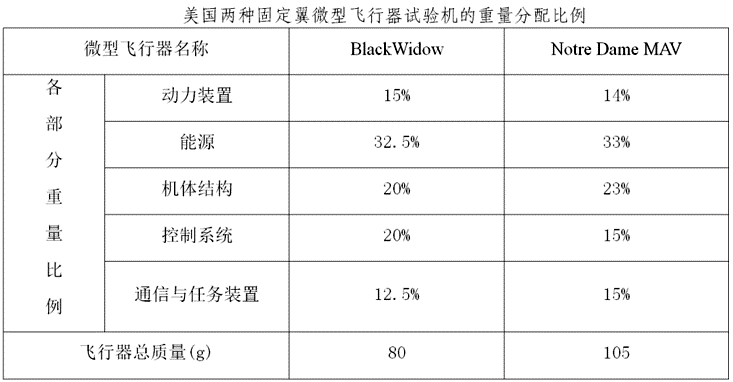
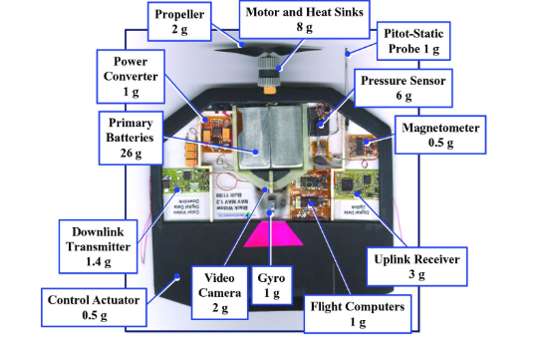
以电动微小型无人机为例,在一定的续航时间要求下,其中的能源重量要占到飞行器总重量的三分之一以上,再减去“有效载荷”重量,为此留给控制、传输和结构的重量就十分苛刻。因此,为了保证“有效载荷”和提高“续航时间”,还需要对重量设计进行反复优化。
从目前设计初步试飞成功的微型无人机试验机数据,可以了解各部分所占重量比例情况:


3、重量控制
不但在设计中要严格限制重量,在制造、装配过程中也要层层加强重量控制:
①制定总体设计减小质量的措施计划;
②采用轻型材料,研究最佳的结构,减轻机体重量;
③系统集成化设计,减小接头、连杆、连线的重量;
④对各元器件、各部件、各分系统执行重量极限控制;
⑤严格制造和装配过程的重量控制;
⑥建立飞行器设计制造过程中产生质量变化的应变措施等。

1、重心计算
无人机的重心即指无人机整体的质心位置,通常将无人机设计为左右对称,因此主要确定重心在飞行器纵轴上的位置(xG)。
重心的计算原则上与常规飞行器一样,先计算出各部件的重量及其重心,再计算出各部件对X原点的重力矩,然后求出整个飞行器的重心:

2、重心位置确定
实际上,单纯的重心计算并没有意义,重要的是如何让确定无人机的重心“应在的”位置,也就是说如何安排各部件的位置。
重心位置确定(以固定翼无人机为例)
①确保左右平衡:
虽然飞行器的外形是左右对称的,但是其内部系统设备一般难于对称布置的。因此,首先布置内部系统部件时要确保重量左右平衡,使得重心在飞行器的中轴线上。
②确定xG:
更重要的是确定重心在纵轴上的X坐标位置,以保证无人机的飞行纵向静稳定性。
为了保证无人机的空气动力纵向静稳定性,则需要将重心设计在“焦点”(XF)之前。
所谓“焦点”是指当无人机的迎角角发生变化时,气动力对该点的力矩始终不变,因此可以理解为气动力增量的作用点。
对于焦点在重心之后的情况,当飞行器迎角增加而升力增大时,空气动力会产生恢复低头力矩。
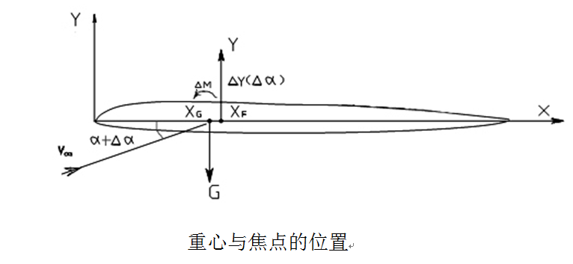
衡量飞行器纵向静稳定性的大小是用“纵向静稳定裕度”来表示:
当重心与焦点垂直方向的距离小到可忽略时,纵向静稳定裕度可以近似用重心与焦点的相对距离值来计算:
对于无尾式固定翼无人机,纵向静稳定裕度的绝对值通常可小于10-15%,对正常有尾布局固定翼无人机,纵向静稳定裕度的绝对值可稍大一些。