以“前飞”为主的飞行器,无论大小,其升力与阻力特性决定了飞行器的基本性能。
极曲线是飞行器升力系数对阻力系数的曲线,反映升力与阻力的相互关系。极曲线是飞行器设计十分重要的依据,特别是对于“固定翼”无人机设计极为重要。
固定翼无人机的极曲线通常可由升力特性曲线CL-α和阻力特性曲线CD-α得到,每一特定飞行速度下可得到一族极曲线CL-CD。因此,同一架固定翼无人机的不同极曲线主要与飞行速度有关。

需要注意的是,微型无人机的极曲线随飞行速度的变化与常规飞行器不一样。
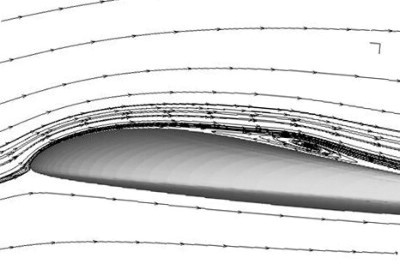
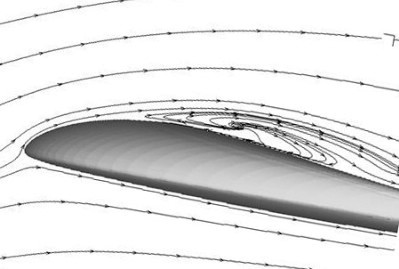
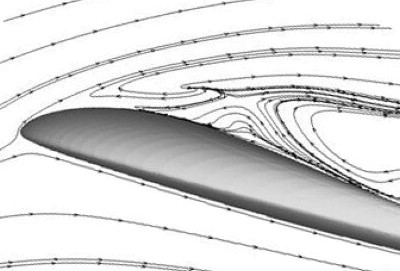
在很低雷诺数下,极曲线随速度变小而向右移,而常规飞行器极曲线随速度变小而向左移,即阻力变小。这是因为,低雷诺数微型无人机的升力系数随着雷诺数而减小,并且层流附面层发生分离或产生“分离泡”,导致阻力增大。


巡航是固定翼无人机的主要设计状态,而极曲线通常是无人机巡航速度设计的依据。
极曲线上与过原点直线相切的切点A就是最大升阻比点。
在给定起飞重量情况下,无人机巡航状态的升力与重量平衡:
通常希望巡航状态接近最大升阻比状态最为有利,因此最有利的巡航速度为:
其中,(CL)A为极曲线最大升阻比点处的升力系数,时也决定了巡航状态时无人机的承载能力。