
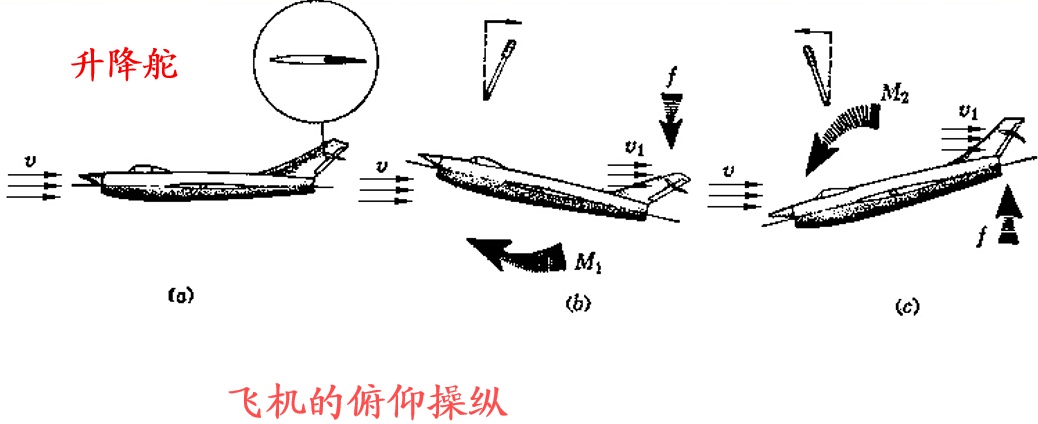
使飞机绕横轴(z 轴)作俯仰(纵向)运动的操纵叫俯仰操纵,也称纵向操纵。
通过推、拉驾驶杆,使飞机的升降舵(或全动平尾)向下或向上偏转,产生俯仰力矩,从而使飞机低头或抬头作俯仰运动。

纵向力矩系数导数:
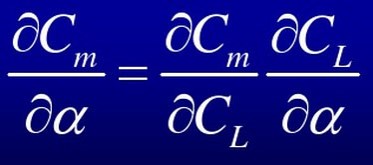
纵向静稳定裕度:焦点与重心的距离除以平均气动弦长。


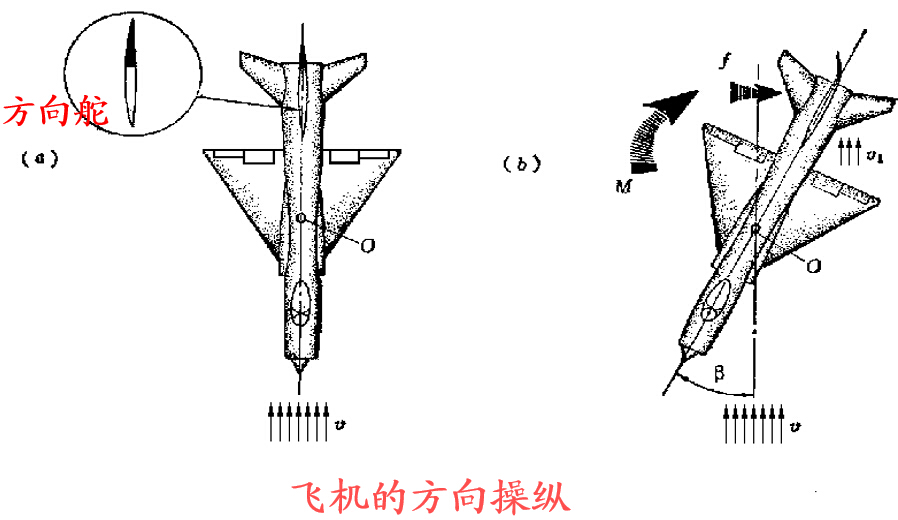
使飞机绕立轴(y 轴)作偏航运动的操纵叫方向操纵,也称航向操纵。
通过蹬脚蹬,使飞机的方向舵向左或向右偏转,产生偏航力矩,从而使飞机向左或向右作偏航运动。

使飞机绕纵轴(x 轴)作滚转(倾侧)运动的操纵叫侧向操纵。
通过左压或右压驾驶杆(左转或右转手轮)使飞机的左、右副翼一侧向下另一侧向上偏转,产生滚转(倾侧)力矩,从而使飞机向左或向右作滚转(倾侧)运动。
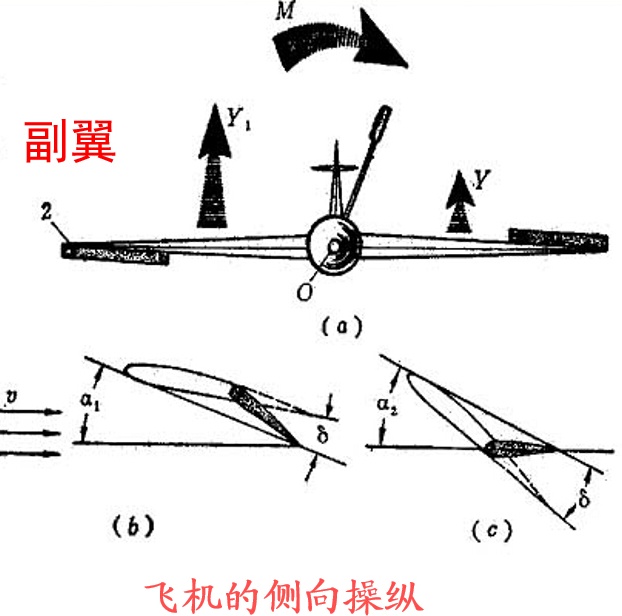

同样,在实际飞行中,方向操纵和侧向操纵也是不可分的,经常是相互配合、协调进行,因此方向操纵和航向操纵也常合称为“横侧向操纵”。

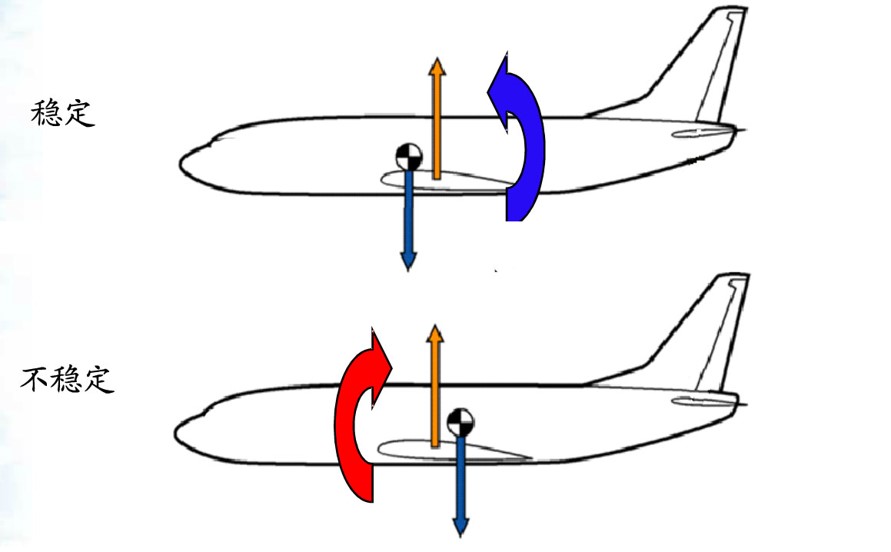
无人机的操纵性与飞机的稳定性:
无人机的操纵性与稳定性之间是一对矛盾关系,操纵性好------- 放宽稳定性;稳定性好------- 放低操纵性。
因此在飞无人机设计时必须统筹考虑,协调处理,根据不同需要协调操纵性与稳定性的指标(如长航时高空无人机更强调稳定性,无人作战机必须有教好的机动性)。

主要的无人机速度性能指标包括:最大平飞速度;巡航速度;最小平飞速度。。
1、最大平飞速度
最大平飞速度是指无人机在某一高度上作水平飞行时,发动机以最大可用推力工作而飞无人机所能达到的最大飞行速度,通常简称为最大速度,以Vmax表示。
对于喷气式发动机:
H < 11000(M) 时

H > 11000(M)时

对于螺旋浆发动机:

其中P/W的单位是kW/kg,
△=ρ/ρ0
ξ= Pv/Pv=0 是发动机速度特性系数;
ξ= 1-0.32M + 0.40M2- 0.01M3;
CD是阻力系数。
2、巡航速度
巡航速度是指发动机在每公里消耗燃油最少的情况下飞机的飞行速度。
3、最小平飞速度
最小平飞速度是指无人机在某一飞行高度上维持定常水平飞行的最小速度,通常以Vmin表示。
无人机的最小平飞速度的大小,对无人机的起降性能有很大影响。

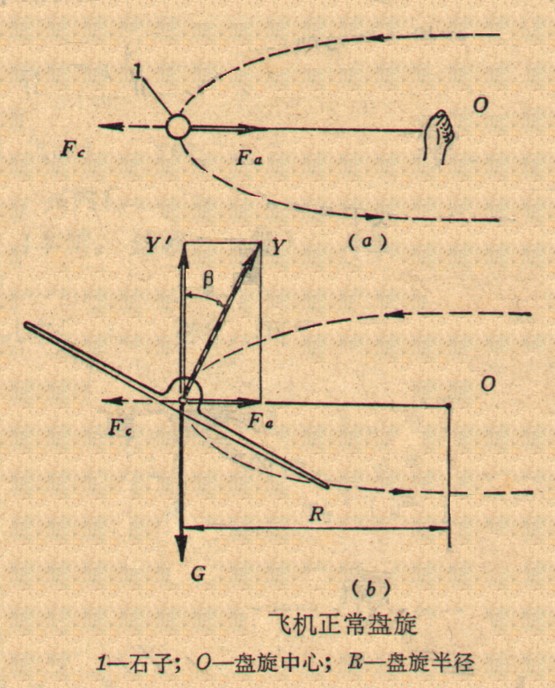
对于无人战斗机来说,水平盘旋飞行时半径大小是至关重要的。影响最小盘旋半径的因素很多,比较粗略地分析可以认为无人机的最大升力系数决定它的最小盘旋半径。

无人机的爬升性能主要包括:爬升率;升限。
1、爬升率
无人机的爬升率是指单位时间内无人机所上升的垂直高度,通常以Vy表示。
要提高最大爬升率Vymax,除设法减小阻力和降低无人机重量外,重要的措施是加大推力。

2、升限
无人机的升限指的是无人机的静升限,包括:
理论升限:是指无人机能进行平飞的最大飞行高度。此时的爬升率为零;
实用升限:是指无人机的最大爬升率为0.5m/s时所对应的飞行高度。
对于螺旋浆发动机:


飞机的续航性能又称耐航性能,对无人机而言,主要包括:航程(控制半径);续航时间。
1、航程
航程是指飞机在一次加油的情况下所能达到的最远水平飞行距离。
飞机在最大载油量及发动机单位飞行距离耗油率最小的情况下飞行所获得的航程就是飞机的最大航程Lmax。
2、控制半径
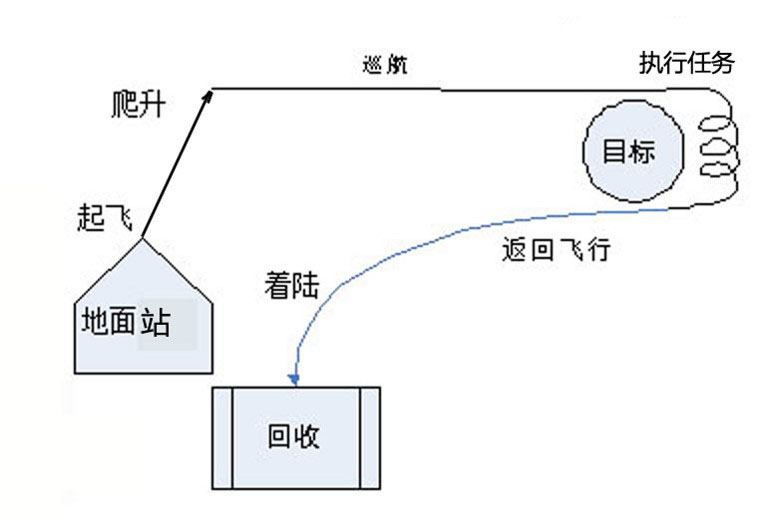
无人机通常要求为控制半径指标,它一方面与无人机航程能力有关,另一方面它与地面站与无人机之间的遥控、遥测能力有关。控制半径小于1/2“航程”,因为无人机航行能力除了航行距离还包括执行任务的盘旋能力。
无人机控制半径
续航时间
续航时间又称航时,指的是无人机在一次加油的情况下在空中所能持续的飞行时间。
无人机在最大载油量及发动机单位飞行时间耗油率最小的情况下飞行所获得的续航时间就是无人机的最大航时tmax。