在无人机飞行动力学研究中,需要用到许多坐标系,因此,理解各个坐标系的含义以及各个坐标系之间的关系就十分重要。
无人机一般飞行速度较小、高度较低,在建立其运动方程时,可以将大地假设为平面,不考虑大地的曲率和旋转影响。
与其他学科相比,无人机等飞行器飞行动力学研究中使用的坐标系数目相对较多,这是因为所涉及到的力、力矩和运动变量多,而且规律复杂。
无人机飞行动力学研究中,一般采用直角坐标系,并遵循右手法则。在定义直角坐标系时,需要明确规定:
1)原点O的位置;
2)基准平面,即包含两个坐标轴(如轴x和y)的平面的取向;
3)其中一个轴(如轴x)在基准平面中的取向。

在研究无人机飞行运动中,常用的坐标系有以下几种:
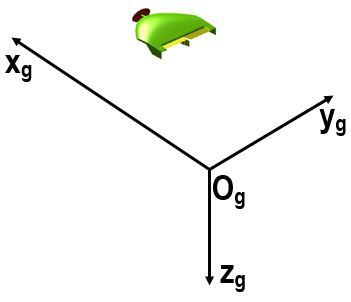
1、地面坐标系(Sg)
地面坐标系与大地固联。
原点Og选择在大地中的某点,通常(但不一定)是地球表面上的点;轴zg铅垂向下;轴xg在水平面内,其方向可任意选择,通常与飞行任务相关;轴yg按右手法则确定。
地面坐标系的主要作用,是衡量飞行器位置和姿态的基准。
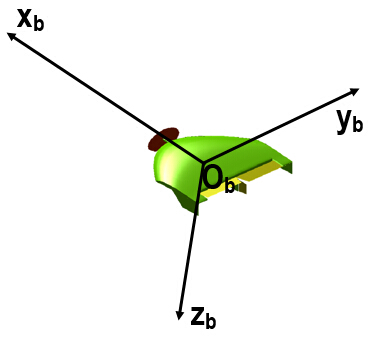
2、本体坐标系(Sb)
本体坐标系与飞行器本体固联。
原点Ob取飞行器质心;纵向轴xb沿飞行器结构纵轴向前;竖向轴zb在对称平面内,垂直于纵轴,指向下;横向轴yb垂直于对称平面,指向右方。
本体坐标系与飞行器的姿态密切相关。
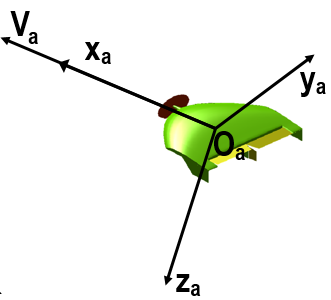
3、气流坐标系(Sa)
气流坐标系与飞行器空速矢量Va和飞行器本体相联系。
原点Oa取飞行器质心;纵向轴xa沿空速矢量Va,指向前;竖向轴za在对称平面内,垂直于空速矢量Va;ya垂直于xa和za ,指向右方。
气流坐标系一般在涉及到飞行器空气动力学建模时使用。
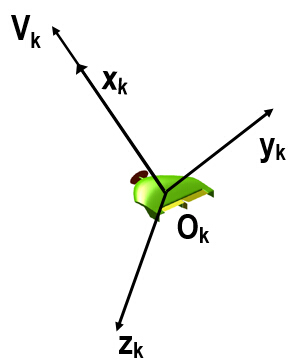
4、航迹坐标系(Sk)
航迹坐标系由飞行器航迹速度矢量Vk决定。
原点Ok取飞行器质心;纵向轴xk沿飞行器航迹速度矢量Vk;轴zk在通过于航迹速度矢量的铅垂平面内,垂直于航迹速度矢量,指向下;yk垂直于xk和zk,指向右方。
航迹坐标系一般在描述飞行器飞行轨迹运动建模时使用。

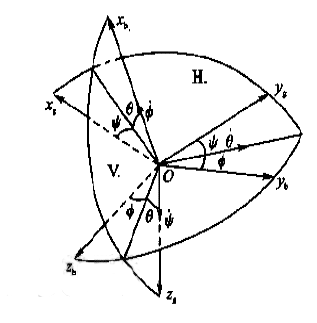
本体坐标系与地面坐标系可由飞行器的三个欧拉姿态角相联系。
偏航角:xb在水平面xgyg上的投影与xg的夹角;
俯仰角:xb与水平面xgyg之间的角度;
滚转角:飞行器对称平面xbyb与通过xb的铅垂平面的夹角;

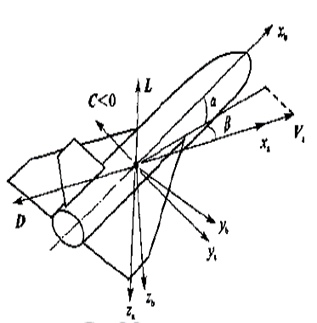
气流坐标系与本体坐标系可由迎角和侧滑角相联系。
迎角:空速矢量Va在飞行器对称平面xbzb上的投影与xb的夹角;
侧滑角:空速矢量Va与飞行器对称平面xbzb之间的夹角。

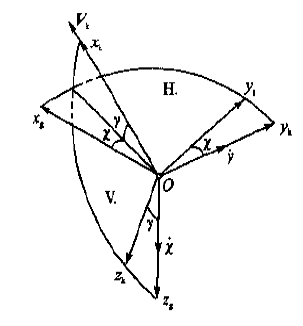
航迹坐标系与地面坐标系之间的关系可由航迹方位角和航迹倾斜角(爬升角)相联系。
航迹方位角:航迹速度矢量Vk在水平面xgyg内的投影与xg的夹角;
航迹倾斜角:航迹速度矢量Vk与水平面xgzg之间的夹角。

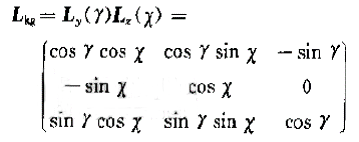
任何两个坐标系Sa、Sb之间的转换关系可以通过坐标系转换矩阵Lba或Lab来描述。
对于任意矢量U=[Ux,Uy,Uz]’,有如下关系:
(U)a=Lab(U)b
(U)b=Lba(U)a
其中,Lab为坐标系Sb到Sa的转换矩阵,Lba为坐标系Sa到Sb的转换矩阵。
地面坐标系Sg到本体坐标系Sb的转换矩阵Lbg

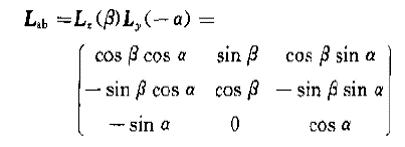
本体坐标系Sb到气流坐标系Sa的转换矩阵Lab
地面坐标系Sg到航迹坐标系Sk的转换矩阵Lkg