飞行仿真是指通过计算机软件及外部硬件设备,对真实世界飞行中所遇到的各种元素,如空气动力,气象,地理环境,飞行操控系统,飞行电子系统等,综合的在计算机中进行仿真模拟,并通过外部硬件设备进行飞行仿真操控和飞行感官回馈的一种技术。
随着计算机技术的发展,依赖于数值计算的飞行仿真在飞行器设计中也越来越多的得到应用。

飞行器运动的仿真一般分为纯数值仿真与半物理仿真。
1、纯数值仿真
在纯数值仿真下,飞行器运动的所有环节和外界环境完全以数学模型来描述,仿真所需要的工具只是计算机硬件和软件;
2、半物理仿真
当系统内某些部分特性难以直接用数学模型加以准确描述时,这些部分则可以用实物(硬件)来体现,这就是所谓的半物理仿真。
实物的参与程度可以是不同的,但无论如何,飞行器的运动和空气动力、发动机推力等总是以数学模型来描述的。

由于无人机在自身特性、飞行环境、飞行方式等方面与常规飞行器存在许多差异,其飞行仿真也存在许多特殊之处:
①无人机相对大型有人飞行器①而言,一般具有较小的尺寸,特别是微小型无人机,尺寸上的限制使得其自主飞行系统在整体性能上表现出严重的不稳定性。系统各部分之间的相互干扰、剧烈的姿态变化影响机载部件的正常运行、系统不可靠性随运行时间增加的累积等等,这些因素都难以用正常的数学模型来加以描述,因此,需要将物理实物模型引入到无人机仿真系统;
②无人机一般尺寸小,飞行速度低,飞行性能极易受各类外界大气扰动的影响,对无人机飞行中的非定常大气模型仿真极为重要;
③微小型无人机具有较小的质量与转动惯量,这使得其对控制行为的作用反应非常灵敏。另一方面,控制机构中伺服电动机等机构在控制精度、灵敏度上的误差将带来较严重的控制误差,需要在飞行仿真中加以体现。
④某些无人机在起飞、降落等阶段可能仍需要进行大量的人工遥控,因此,将遥控信号引入仿真系统内,一方面可以有效地检验无人机遥控飞行性能,同时,还有利于遥控人员的操作训练。

以微小型无人机为例,结合微小型无人机飞行系统特点,给出一个无人机实物模型与数学模型相结合、自主控制与人员遥控相结合的飞行仿真系统方案,仿真系统结构图如下:
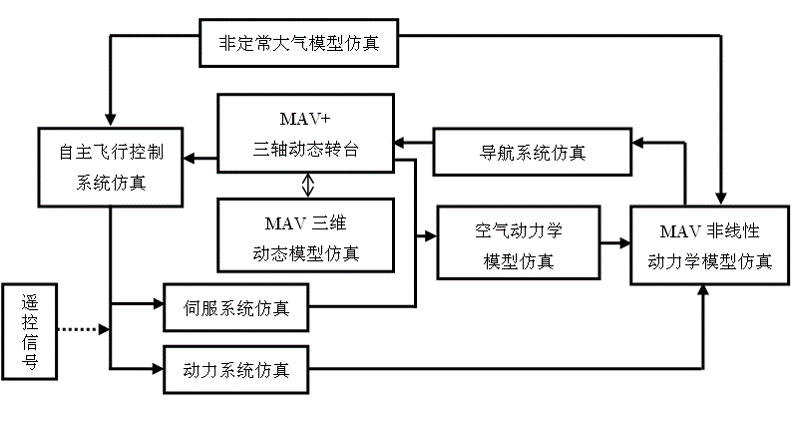
微小型无人机半物理飞行仿真系统采用如下设计:
1、无人机数学模型构成一个完整的仿真循环
无人机飞行运动、空气动力、发动机拉力、导航系统、伺服系统采用数学模型来描述。
采用合理的数学模型来对无人机系统进行仿真,不仅能正确反映各部分的工作特性,而且参数调节灵活,能够表现无人机系统存在的特性漂移以及个体差异。
无人机飞行仿真每个循环内步骤如下:
①在特定飞行状态与无人机控制状态下,由无人机空气动力学模型仿真得到相应的无人机气动力与气动力矩;
②结合无人机空气动力与动力系统仿真得到的拉力,作为无人机非线性运动模型的输入,获得相应的无人机反映,表现为无人机角速度、加速度等信息;
③无人机导航系统将对获得的角速度、加速度等信息进行相应处理,进一步得到无人机姿态、位置、速度等完整的导航定位信息;
④根据无人机导航信息,结合外界的非定常大气运动,无人机自主飞行系统做出合理的控制,最终给出对各控制操纵面、动力系统的控制指令;
⑤根据新的飞行状态与控制舵面情况,获得新的空气动力,开始下一循环
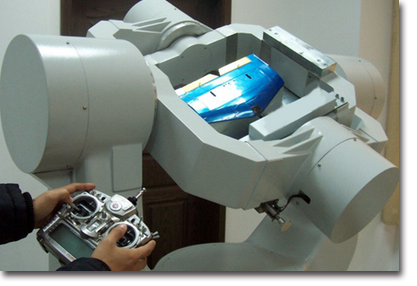
2、将无人机实物模型引入仿真系统
在无人机飞行仿真系统中,引入无人机实物模型。在仿真过程中,无人机固联于三轴动态转台,根据仿真得到的姿态信息,实时偏转。根据仿真得到的动力信息,给出真实的油门控制量。

通过真实的无人机旋转运动,能够获得系统的真实反映;同时,无人机发动机的正常工作,也能够真实仿真出因电动机转动引起的系统不稳定;此外,在仿真过程中无人机这个系统都处于正常开机工作状态,能够真实反映系统随运行时间的可靠性情况。
3、将自主飞行控制与人员遥控相结合
对于需要人员参与遥控的无人机,人员对无人机的遥控操作具有强烈的主观性、模糊性以及不确定性等,难以用数学模型加以描述,因此,将人员遥控引入到无人机仿真系统内。
操作人员根据无人机随转台的动态运动状态或无人机三维运动动画,实时的给出遥控指令,作为仿真系统内伺服系统和动力系统的输入。
在一定程度上,带遥控输入的无人机飞行仿真系统也起到了无人机飞行模拟器的作用。

1、无人机运动模型
无人机运动模型是其飞行仿真系统的基础。
运动模型反映了无人机在特定条件、特定输入下的运动输出。对于常见的固定翼、旋翼无人机,可将无人机运动分解为质心的线运动与机体绕质心旋转运动。
具体的运动建模方法,在无人机动力学建模一节中已有阐述,在这里不再赘述。
2、无人机空气动力学模型
无人机空气动力学模型表征无人机所受外部气动力、气动力矩与各飞行状态量的关系。
空气动力学模型可由CFD计算、风洞试验或飞行数据辨识等方法得到。
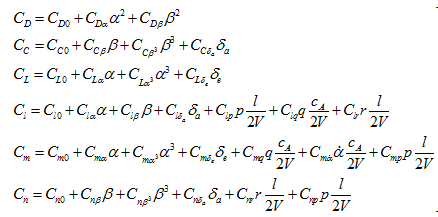
以固定翼无人机为例,其空气动力学模型主要表征升力系数、阻力系数、侧力系数、滚转力矩系数、俯仰力矩系数以及偏航力矩系数与无人机飞行状态以及控制状态之间的关系。
3、无人机导航系统仿真模型
在对导航系统仿真时,结合导航系统所用传感器的性能,可仿真系统的各类误差、延时,真实表现。
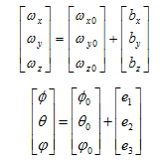
姿态测量仿真中,主要考虑因传感器测量白噪声引起的系统误差,即,在角速度、角度理想计算结果的基础上加入陀螺测量角速率误差与姿态角度测量误差,均采用白噪声模型仿真,根据所用传感器性能数据取一定强度。
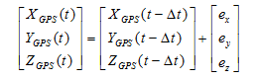
在对GPS测量数据进行仿真时,不仅需要考虑GPS固有的测量精度误差,还要考虑系统存在的延时效应:
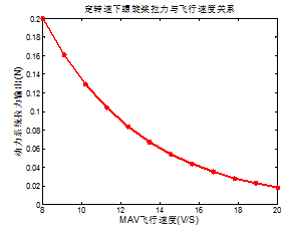
动力系统仿真中,主要需要考虑动力系统输出拉力随飞行速度的变化,并给定最大系统拉力输出最大限制。
4、无人机伺服系统仿真模型
无人机系统中控制机构如升降副翼、方向舵等都采用舵机控制。考虑机载舵机的性能特点,在对伺服系统仿真时,需要仿真系统伺服定位精度以及对控制信号的响应延时。

5、大气仿真模型
在无人机飞行仿真中,主要需要对大气环境中的外界风干扰加以考虑。可将大气环境中的风分为两种类型:
一类是速度与方向不变的常值风。
常值风对无人机飞行的相对速度造成一个恒定影响,从而对无人机飞行航程,飞行轨迹等产生影响。对常值风场的仿真较为简单,取:
另一类是随时间变化的非定常大气扰动。
非定常的大气扰动作用下,MAV空速、机体加速度以及飞行姿态都会在瞬间剧烈变化,严重时甚至引起失速。非定常大气扰动的建模比较复杂,在这里不作详细介绍。

无人机飞行仿真数学模型的基本形式是以其动力学和运动学方程为基础的一阶常微分方程组,可归纳成如下形式: