引导飞机、船舶、车辆以及个人(总称作运载体)安全、准确地沿着选定的路线,准时到达目的地的技术手段。(广义)
导航的基本功能:
①我现在在哪里? 随时给出飞机准确的即时位置(狭义)
②我要去哪里?
③如何去?

无人机姿态、空间位置、飞行速度等导航状态信息的准确获得是实现其自主飞行的必要条件,也是无人机自主飞行所涉及的关键技术之一。
无人机导航特点:
①导航系统任务复杂:剧烈的姿态、位置变化
②系统硬件最优组合 : 尺寸与有效载荷的限制
③系统精度、可靠性:微型MEMS电子元器件

无人机导航技术的研究主要集中在捷联惯性导航、卫星定位导航以及视觉导航等几个方面。
常用的无人机导航系统可由捷联惯导、GPS以及各类气压传感器系统组合而成。
实例:集GPS、微型加速度计、微型角速率陀螺和微型高度计,微型空速计于一体的组合导航系统结构。
● 组和导航系统主要包括组和传感器测量模块、信号调理电路、DSP和电源管理模块等组成。
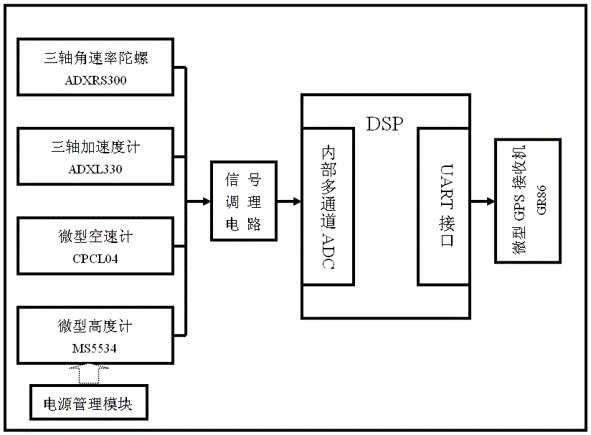
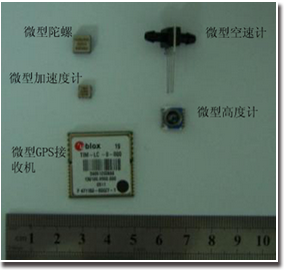 ● 组和传感器测量模块集成了三轴加速度传感器、三轴陀螺、微型空速计、微型高度计和微型GPS接收机。
● 组和传感器测量模块集成了三轴加速度传感器、三轴陀螺、微型空速计、微型高度计和微型GPS接收机。
● 角速率陀螺、加速度计分别实时测量无人机飞行过程中的角速率、加速度。
● 微型空速计、微型高度计分别测量空速与气压高度所需的空气压力。
● 微型GPS实时给出无人机三维空间坐标与速度等信息。
● 陀螺、加速度计、空速计和高度计输出的模拟信号经信号调理输入ADC模块,GPS接收机信号则可直接通过通用串行接口输入DSP。
● DSP将接收到的各类传感器数据融合后解算出无人机的飞行姿态、位置等导航信息。

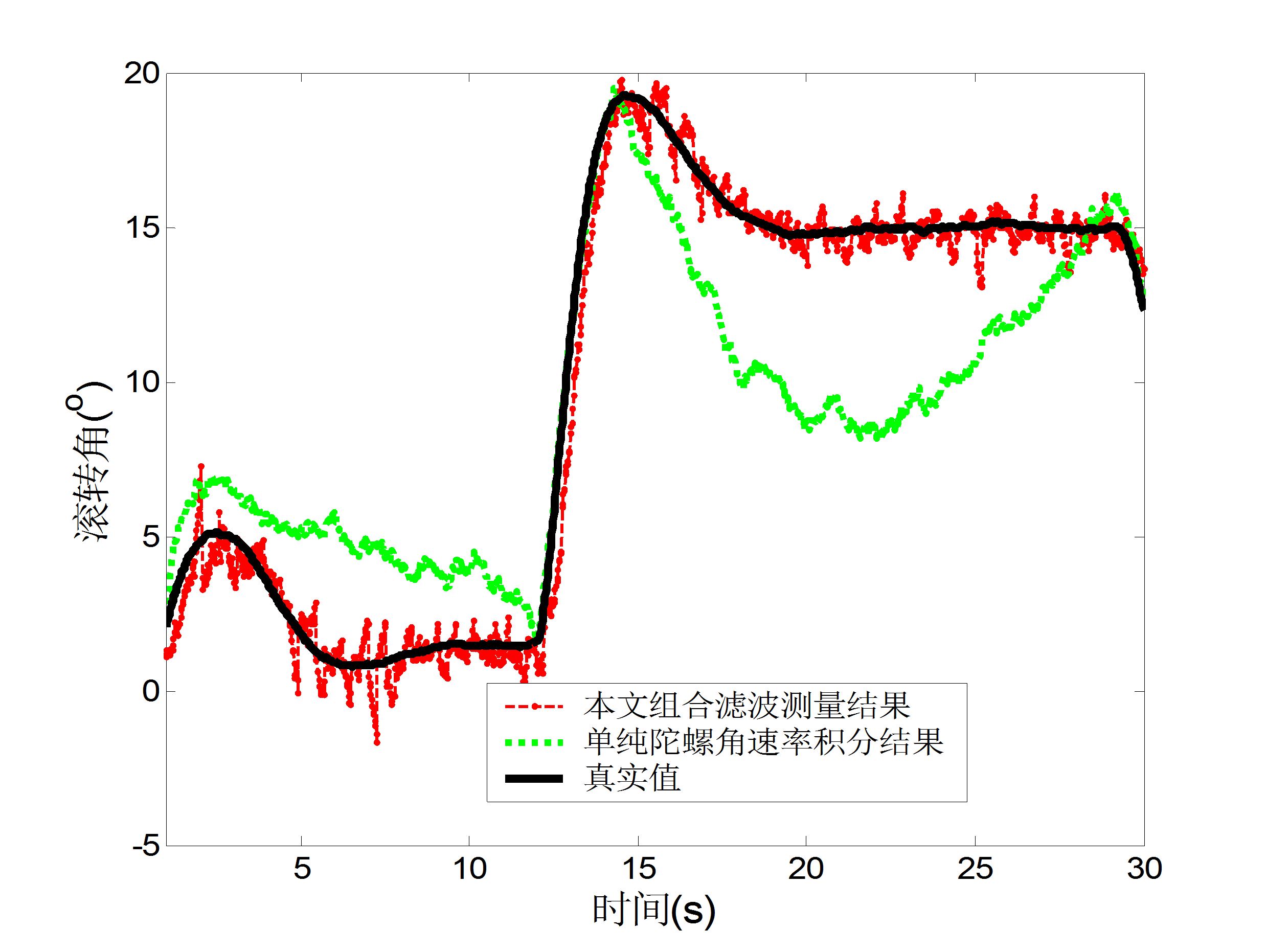
实例:基于卡尔曼滤波的多传感器组合姿态测量技术
1、状态空间模型
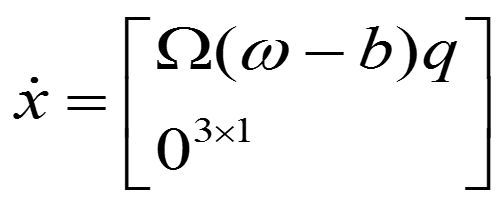
四元数结构下的姿态运动学方程
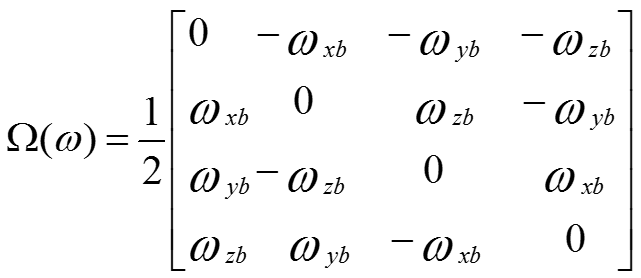
加入陀螺漂移量进行补偿,构成状态矢量
2、测量空间模型
GPS数据获得加速度ag:
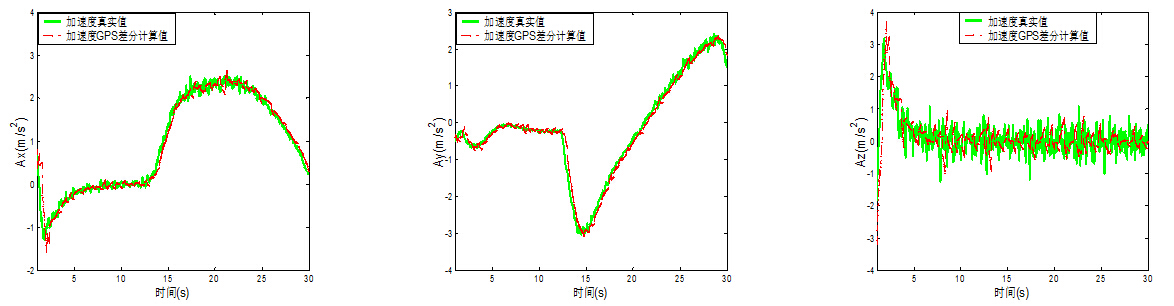
两个加速度之间的关系:
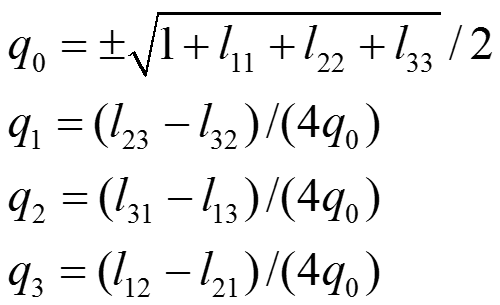
通过解算四元数各分量,可求解无人机实时姿态。
3、仿真结果

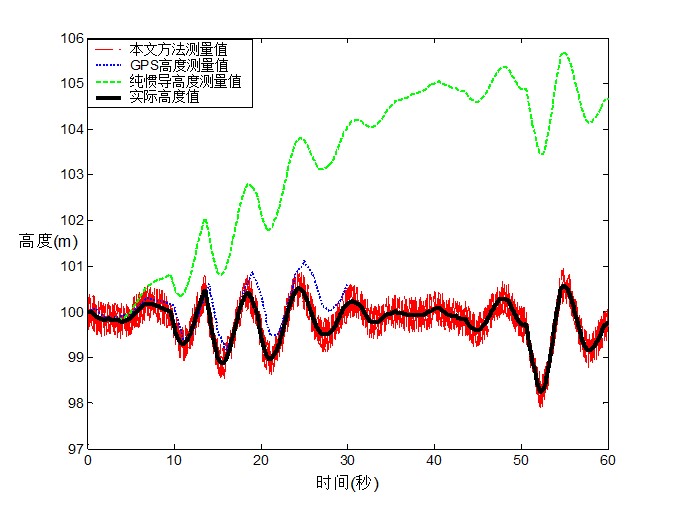
实例:多传感器导航信息优化。
无人机的位置、速度信息可由多种方法测得:
①基于GPS信号的无人机导航信息提取;
②基于纯惯导的无人机导航信息提取;
③基于气压传感器信息的无人机导航信息提取。
1、优化原理
在GPS信息有效的情况下,利用GPS定位与测速是最为直接简便的,测量精度也满足无人机导航要求。
纯惯导方式在组合导航中的权重也应随着工作时间的增加而不断减小。
基于空速计与高度计信息的导航算法有效性随着外界风速的增大而减小,飞行迎角与侧滑角的增大也会减小这一算法的精度。
2、质心位移速度优化
权重系数:
仿真结果: