空气动力学计算是无人机气动外形设计的基础。
无人机气动计算原则上与有人飞行器没有区别,但是根据不同无人机的要求,以及无人机设计周期短的特点,其对气动计算的方法的选择与应用也有所区别。


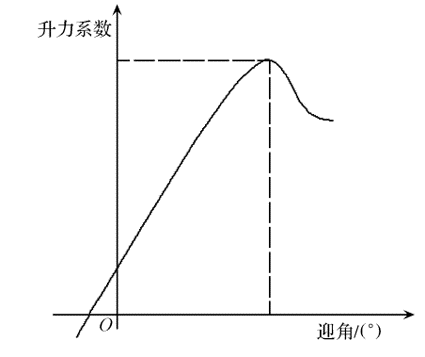
1、升力系数

L 为升力,ρ为大气密度,V∞为来流速度,S为参考面积
2、阻力系数


1、翼型升力系数导数:
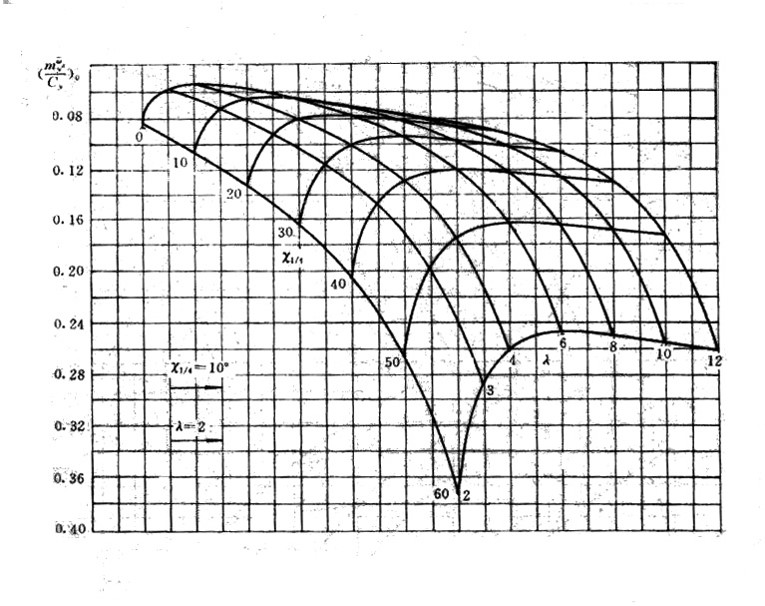
2、全机升力系数导数:
其中:
cmax,t为翼型最大厚度线的后掠角,λ为展弦比,若有翼尖小翼,则:λ有效=1.2λ
η=βCla/2π 或0.95
β2=1-M2
F为机身升力影响系数:F=1.07(1+d/l)2,其中d为机身当量直径,l为机翼展长。
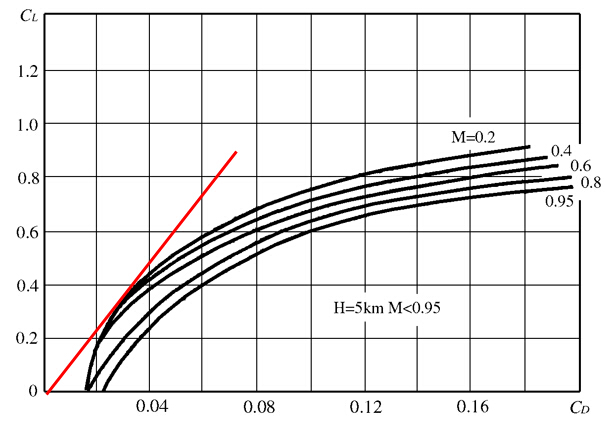
3、极曲线 (Drag Polar)
阻力系数:

通过《航空气动力手册》、《飞机设计手册》等书中飞机气动力计算的经验公式和大量的图表,可以计算出所设计无人机布局形状的基本气动特性,如升力系数、阻力系数、纵向、横向和航向力矩系统,以及相关气动导数。

面元法是基于流场速度位线性方程的基本解:

其中“涡格法”就是最常用的面元法。沿机翼表面弦向i和展向j方向将翼面划分为n个网格,每个网格上布置一涡环,涡环的前缘位于网格的1/4弦线处,取网格3/4弦线的中点为控制点,在该点处气流速度应该满足无穿透边界条件式。通过求出机翼表面的涡强分布,继而求出机翼压力差分布,翼获得升力系数。


对于具有后掠角翼脱体涡和其他非线性流场特征的无人机,可以采用流体动力学无粘“欧拉方程”数值解和附面层修正方法,来获得无人机表面压强分布。欧拉方程形式为:

附面层动量积分方程:

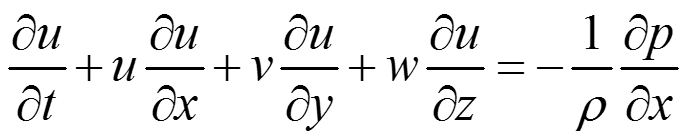
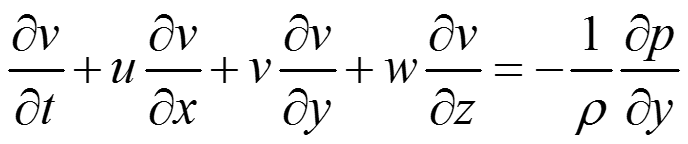
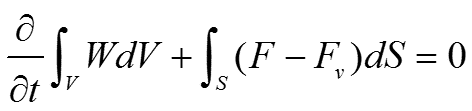
流体动力学N-S方程既可以解决非线性问题,也考虑到粘性流问题。通常完整的流体动力学方程组,包括质量方程(连续方程)、动量方程(N-S方程)和能量方程:


通常采用有限体积法对上述微型方程组离散化合数值求解。



对于旋翼类无人机,旋翼气动力学的计算是基础。由于旋翼气动力是“非定常”特性,所以不同于上述定常空气动力学问题。常见方法有
1、动量理论
旋转着的螺旋桨由无限多且无限窄的桨叶组成,这样可将螺旋桨看成是一个均匀作用于空气的无限薄的圆盘,流过桨盘的气流施加给螺旋桨的反作用力就是螺旋桨产生的拉力。

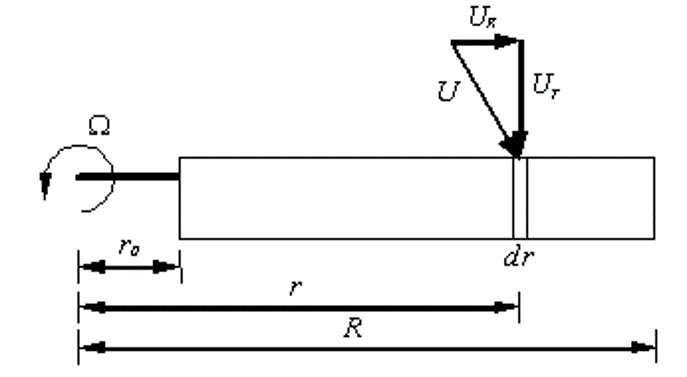
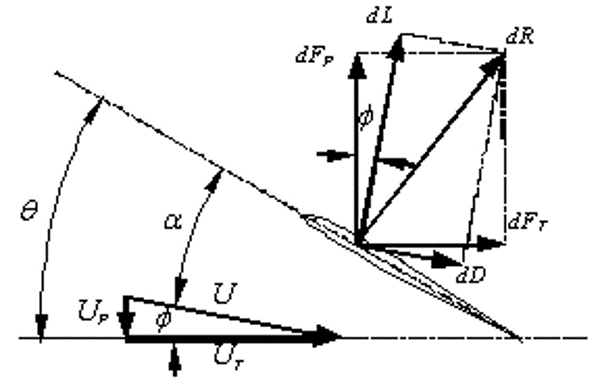
2、叶素理论
把每片桨叶看成由无限个桨叶微段(即叶素)组成,找出叶素的几何、运动特性和气动特性之间的关系,然后对一片桨叶进而对整个螺旋桨进行积分,得到螺旋桨的拉力和功率公式。
3、非定常N-S方程数值方法
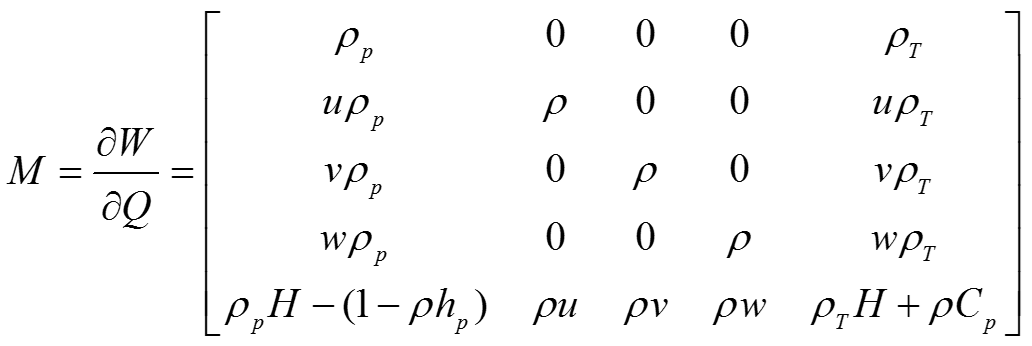
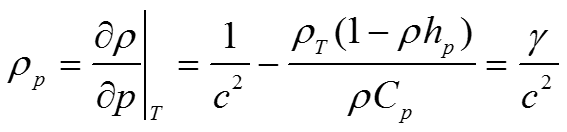
其中:
流场特性计算结果")
流场特性计算结果")
流场特性计算结果")

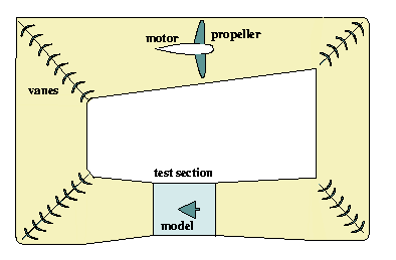
对无人机模型进行风洞试验,可以直接获得无人机气动特性。风洞试验适用于初步设计确定了无人机三维外形之后,验证和测试无人机各种空气动力系数。
