
【角色扮演】
场景:
某港口集装箱码头
元素:
某夏令营团长、若干高中夏令营成员、负责接待夏令营的港口专门人员
过程:
1、某学生:(望着高高的集装箱正在装卸)这么重的集装箱是怎么升上去的啊?
2、接待人员:集装箱的装卸靠的是这精密的港口机械驱动完成,当然离不开吊具。
3、某学生:吊具是什么?
接待人员:(开始介绍吊具理论知识)
内容详见所编教材4.2,此时可配合出现常用的吊具图片
【学习目标】
设汁集装箱装卸工艺的目的是对不同的集装箱船舶、不同的集装箱箱型采用不同的机械组合和作业程序,使装卸集装箱的时间最短、效率最高、成本最低、集装箱码头和堆场的通过能力最大、经济效益最好。
通过集装箱码头工艺的认知与学习,应了解集装箱机械与装卸工艺的发展;了解集装箱的吊具,了解集装箱典型装卸工艺方案。
【典型案例】
1966年,美国Paceca公司为原西德不来梅港建造了西欧第一台岸边集装箱装卸;1967年,日本石川岛播磨重工业公司在日本大阪港建造了亚洲第一台岸边集装箱起重机,该机起重量为30t,外伸距为34m,轨距23m。
为适应和推动世界集装箱运输的发展,1973年国际标准化组织(ISO)正式颁布了第一部集装箱标准:ISO 668一1973《第一系列货物集装箱外部尺寸、公差和重量》,现行的标准为ISO 668—1979。这项国际标准所规定的集装箱规格,即为目前世界上流通使用的集装箱的标准规格。这一国际标准的颁布,其意义在于为集装箱装卸机械的选型提供了依据.并使集装箱装卸机械形成了标准化设计,例如,岸边集装箱起重机的最大额定起重量按此规定.发展到了30.5t。
我国从1975年开始开展国际集装箱海上运输,并同时开始了集装箱装卸机械的研制工 作。1979年前后,研制出了第一批岸边集装箱起重机等集装箱装卸机械。进入20世纪80年代以后,由于集装箱运输的飞速发展.现有的集装箱装卸机械无论是对船型适应能力还是生产效率上均不能满足时代的需要,为此,集装箱装卸机械的发展进入了改进和提高阶段。实现这一目标可分为两个阶段进行,首先是实现集装箱运输管理的自动化,然后,在此基础上,根据集装箱运输管理的要求,对各种集装箱装卸机械进行自动化控制。除了上述二个目标之外,集装箱装卸机械也正朝着采用新的设计计算方法(CAD,优化设计等)、提高可靠性、节能、操作简便舒适、提高机械完好率等方向不断加以改进和提高。
【知识储备】
(一)集装箱吊具与装卸机械
1.集装箱吊具
集装箱吊具是供集装箱装卸机械吊运集装箱时使用的专用属具。在专业作业场所用于集装箱吊运的专用属具称为集装箱专用吊具。如图4-5所示。
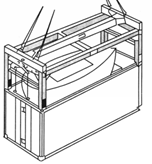
图4-5 集装箱吊具
(1)集装箱的吊运方式。按集装箱吊具与装卸机械联接方式的不同,即按吊运方式的不同,集装箱吊具的吊运方式主要有四吊点吊运方式和单吊点吊运。
1)四吊点吊运四吊点吊运方式在吊运集装箱时有四个吊运点,吊具从四个吊点联接集装箱,通过吊具上的钢丝绳滑轮系统,卷绕在装卸机械起升机构的起升卷筒上进行吊运集装箱。集装箱专用装卸机械,如岸边集装箱起重机(集装箱装卸桥)、集装箱跨运车、集装箱龙门起重机等均采用这类集装箱吊具。
2)单吊点吊运。利用门座起重机或船舶吊杆等吊运集装箱时,吊具的吊运点只有一个。吊具用四根绳索吊起后,集中在吊钩一点上,吊具与集装箱角件的联接可以有电动、电动液压或手动的操作方式。用卸扣、钢丝绳和吊钩等吊运集装箱的吊具称索具。简易式集装箱吊具,其结构主要由吊具机架和手动旋锁机构等组成。
(2)集装箱专用吊具。集装箱专用吊具的结构主要由吊具机架,吊具旋锁驱动装置、导向板驱动装置、吊具前后倾斜装置、伸缩机架驱动装置等组成。
按集装箱吊具的结构和吊具动作过程的不同,集装箱专用吊具的种类主要有固定式集装箱专用吊具、组合式集装箱专用吊具、伸缩式吊具三种。
1)固定式集装箱专用吊具。这类吊具属于直接吊装式吊具。常用的有20 ft吊具和40 ft吊具,分别用于20ft箱型和40 ft箱型,它们之间不能互用,吊运不同箱型需更换吊具。这类吊具具有结构简单、重量轻等优点。简易式集装箱专用吊架也属这类吊具。由于不能同时适用于多种箱型,使得操作过程中更换吊具所花费的时间较长,使用不够方便,所以,在专业化集装箱装卸作业中使用较少。
2)组合式集装箱专用吊具。组合式集装箱专用吊具是通过几种不同尺寸的固定式集装箱专用吊具组合来实现吊运集装箱的。组合式集装箱专用吊具主要有:
①吊梁式组合吊具;
②主从式组合吊具;
③双吊式吊具。
3)伸缩式吊具。伸缩式吊具具有伸缩吊架,能同时适用于不同箱型,适应20ft~40 ft国际标准集装箱的运吊作业,这种吊具,其最大自重约8~10t。是目前集装箱装卸机械采用最为广泛的一种吊具
4)旋转式吊具。这类吊具是为旋转类的门座起重机作业或船舶吊机作业而设计的一种专用吊具。通常采用岸边集装箱装卸桥吊运集装箱时,由于集装箱运行轨迹与岸上起重机轨道作平行移动,吊运集装箱过程吊具不需旋转;当使用门座起重机作业或船舶吊机作业时,集装箱由船到岸或岸到船的吊运过程中,集装箱要发生旋转,如果这时吊具不作相应的旋转,则会发生集装箱不能停放在与岸边集装箱装卸桥轨道成平行的作业线内,从而影响集装箱吊运作业的正常进行。为了能够使集装箱卸到与岸边集装箱装卸桥轨道平行的作业线位置内,在使用门座起重机或船舶吊机吊运集装箱时,吊具也要作相应的旋转,其旋转角度与起重机旋转速度相同,但方向相反。
5)顶吊和底吊两用式集装箱吊具。这种吊具既能顶吊装卸又能兜底起吊集装箱,这种吊运方式是一种比较安全的装卸方式。顶吊方式是用四个旋锁与集装箱的四个顶部角件联接;底吊方式是用抓臂将集装箱从底部吊起。采用抓臂时,集装箱应采用设有抓臂吊槽的集装箱。顶吊和底吊两用式集装箱吊具能够吊运20ft~40ft的集装箱。
【拓展提高】
集装箱吊具对位:集装箱专用吊具为了方便吊运作业,缩短吊具与集装箱的对位时间,一般都配有导向板装置。当集装箱吊具中心线和集装箱中心线的偏差小于200mm时,可通过放下吊具导向板迅速与集装箱对位,使集装箱吊具的旋锁快速插入集装箱的顶角件的孔中。吊具完成与集装箱联接后,吊具导向板全部翻转向上,这时,集装箱吊具的外廓尺寸和集装箱外型尺寸一致,因此可以畅通地进出集装箱船舶舱内集装箱箱格和堆场箱堆之间。
在装卸过程中,如果集装箱出现横倾或纵倾等水平面上的误差时,就要求集装箱吊具具有横倾或纵倾的功能来适应这种误差。集装箱吊具的横倾或纵倾是由集装箱吊具的倾斜装置来实现的,其倾斜角度通常按±5°来考虑。
集装箱吊具减摇:对岸边集装箱装卸桥和堆场集装箱龙门起重机,当集装箱装卸机械的行走小车以一定的速度行走后制动停车时,集装箱吊具与其所吊运的集装箱将会产生摇摆。随着高速型机械的出现,集装箱装卸机械运行小车的行走速度得以大幅度提高,由此而产生的吊具与集装箱的摇摆也随之增大,这种摇摆会使集装箱吊具对位花费更长的时间,从而严重影响装卸效率。
根据当前的机型以及作业条件表明,当集装箱装卸机械运行小车的运行速度在130 m/min以上时,应在集装箱吊具上加装减摇装置。集装箱吊具减摇装置的性能指标是:当集装箱起吊离地10m、运行小车以额定速度行驶一段距离并制动停车后10s内,集装箱吊具的摇摆幅度应控制在土250px以内。应当指出,集装箱吊具与集装箱的摇摆量与操作人员的操作水平有很大的关系。
2.集装箱码头装卸机械
随着集装箱运输的发展,集装箱码头装卸搬运机械也得到了相应的发展。集装箱的标准化和集装箱船的专用化,为港口码头装卸高效率化和自动化提供了良好的条件。集装箱码头的机械设备主要分为码头岸边装卸机械、水平运输机械、场地装卸机械。
(1)岸边装卸机械。岸边装卸机械是指承担货物在码头前沿与船舶之间的装卸作业或船上货物翻动移位作业的机械。岸边装卸机械主要有岸壁集装箱装卸桥、多用途门座起重机、高架轮胎式起重机、轨道式龙门起重机等。
①岸壁集装箱装卸桥。在现代化的集装箱码头上,目前从事码头前沿集装箱起落舱作业的设备普遍采用岸壁式集装箱装卸桥来进行船舶的装卸作业。岸壁集装箱装卸桥,简称“集装箱装卸桥”或“桥吊”,它是集装箱码头装卸集装箱的专用机械。如图4-6所示。

图4-6 岸壁集装箱装卸桥
集装箱装卸桥沿着与码头岸线平行的轨道行走。它主要由带行走机构的门架、承担臂架机构的拉杆和臂架等部分组成。臂架又可分为海侧臂架、陆侧臂架以及门中臂架3部分。海侧臂架和陆侧臂架由门中臂架连接。臂架的主要作用是承受装卸桥小车的重量,小车带有升降机构,而升降机构又用来承受集装箱吊具和集装箱的重量。海侧臂架一般设计成可变幅式(可以俯仰),当集装箱装卸桥移动时,为了船舶或航道的安全,一般将海侧臂架仰起,以便集装箱装卸桥移动时不会与船舶的上层建筑发生碰撞。
【拓展提高】
岸边集装箱装卸桥按外形结构分类主要有“A”型框架式、“H”型框架式等结构,这两种装卸桥的海侧臂架都可用铰链将悬臂俯仰。根据特殊作业要求,岸边集装箱装卸桥的外形与结构还有滑动式低门架型、前臂折叠型等。
为了提高集装箱桥吊的装卸效率,并降低集装箱桥吊的自重,集装箱桥吊的起升机构多采用简单钢丝绳卷绕系统,小车行走机构多采用全绳索牵引式卷绕系统,司机室多采用具有良好视野的独立移动式司机室。
②多用途门座起重机。多用途门座起重机是港口通用件杂货门座起重机的一种变形,它是为了适应船舶混装运输的需要而发展起来的,主要增加了装卸集装箱的功能。和通用门座起重机一样,它一般也是由起升机构、变幅机构、旋转机构和大车行走机构组成。如图4-7所示。

图4-7 多用途门座起重机
多用途门座起重机可按不同的需要,配装不同的装卸工具(如集装箱专用吊具、吊钩、抓斗等),设置相应的附加装置,可进行集装箱、件杂货、重大件、散货的装卸作业。多用途门座起重机是多用途码头的一种理想的作业机型。
多用途门座起重机的工作覆盖面积大,与岸边集装箱装卸桥比,多用途门座起重机的自重较轻,轮压较低,对码头的负荷要求低,从而可安装在原有的门机码头上使用。集装箱吊具有自动旋转装置,以保持装卸作业过程中,集装箱的纵轴线与码头岸线平行。它具有吊具水平补偿装置,以保持变幅过程中,吊具与集装箱的水平状态。吊具还装有偏重心调节装置,以防止集装箱偏载所产生的箱体倾斜。
③高架集装箱轮胎式起重机。高架集装箱轮胎式起重机是在轮胎式起重机的基础上发展起来的一种码头前沿集装箱起重机械。它既有轮胎式起重机的机动性强、对场地要求不高的特点,又具有门座起重机的货物能水平移动、驾驶室离地面较高、操作方便、臂架铰点高、方便卸船作业的特点。如图4-8所示。

图4-8 高架集装箱轮胎式起重机
(2)水平运输机械。水平运输机械是指承担货物平地移位作业的机械。水平运输机械主要有牵引车、挂车和跨运车。
①集装箱牵引车与挂车。牵引车又称“拖头”,其本身不具备装货平台,必须和集装箱挂车连接在一起,才能拖带集装箱进行码头内或公路上的运输。挂车又称为“拖车”或“平板”,其本身没有动力,仅仅是一个载箱的平台。随着集装箱运输的发展,其专业化和标准化程度不断提高,出现了各种能满足不同需要的挂车。如图4-9所示。

图4-9 集装箱牵引车
②跨运车。集装箱跨运车是在20世纪60年代中期,随着集装箱运输的发展,为了与码头前沿的岸边集装箱起重机相配合,在搬运长大件和钢铁制品的基础上发展起来的,用于集装箱码头、集装箱中转站,从事集装箱的搬运、堆码等工作。如图4-10所示。

图4-10 集装箱跨运车
跨运车是以门型车架跨在集装箱上,由吊具的液压升降系统吊起集装箱进行搬运和堆码。它采用旋锁机构与集装箱结合或脱开,吊具能升降,以适应装卸堆码要求,吊具还能侧移、倾斜和微动,以满足对箱位的要求。
(3)场地装卸机械。场地装卸机械是指承担货物在场地上堆码作业的机械。场地装卸机械主要有叉车、轮胎式龙门起重机、轨道式龙门起重机、正面吊运机。
①集装箱叉车。集装箱叉车(又称叉式装卸车)是集装箱码头上常用的一种装卸机械,主要用于吞吐量不大的综合性码头进行集装箱的装卸、堆垛、短距离搬运、车辆的装卸作业,也有用于大型集装箱码头堆场的辅助作业。它是一种多功能机械,是从普通的叉车为适应集装箱作业的需要而发展起来的。集装箱叉车有正面叉和侧面叉两种。叉车除了配备标准的货叉以外,还配备有顶部起吊和侧面起吊的专用属具。另外,为了便于在装卸过程中对准集装箱,货架还具有侧移和左右摆动的功能。如图4-11所示。

如图4-11 集装箱叉车
②轮胎式龙门起重机。轮胎式龙门起重机是集装箱码头堆场进行装卸、搬运、堆垛作业的专用机械。轮胎式龙门起重机由前后两片门框和底梁组成门架,支撑在橡胶轮胎上,装有集装箱吊具的行走小车沿着门框横梁上的轨道运行,配合底盘车进行集装箱的堆码和装卸作业。轮胎式龙门起重机主要特点是机动灵活、通用性强。它不仅能前进、后退还设有转向装置,通过轮子的900旋转,能从一个箱区转移到另一个箱区进行作业。如图4-12所示。

图4-12轮胎式龙门起重机
③轨道式龙门起重机。轨道式龙门起重机是集装箱码头和集装箱中转站堆场进行装卸、搬运和堆码集装箱的专用机械。该机由两片悬臂的门架组成,两侧门腿用下横梁连接,门架支承在行走台上,并在轨道上运行。轨道式龙门起重机一般比轮胎式龙门起重机大,堆垛层数多。轨道式龙门起重机是沿着场地上铺设的轨道行走的,所以只能限制在所设轨道的某一场地范围内进行作业。轨道式龙门起重机自身定位能力较强,较易实现全自动化装卸,是自动化集装箱码头比较理想的一种机械。如图4-13所示。

图4-13 轨道式龙门起重机
(二)集装箱装卸桥的装卸船作业过程
集装箱装卸桥在装卸船作业时,沿着与码头岸线平行的轨道行走,完成集装箱船舶的装船与卸船作业。通常集装箱装卸桥装卸船作业时的一个工作循环耗时约需120s左右。卸船作业步骤:
(1)船靠码头前,将集装箱装卸桥运行至码头岸线的大致作业位置;
(2)船靠码头后,将集装箱装卸桥移至具体的作业位置;
(3)按照装卸顺序,将小车移至船上待卸箱的正上方,放下吊具;
(4)吊具上的扭锁装置将集装箱锁定后,吊起船上的集装箱;
(5)小车沿悬臂向陆侧方向移动,将集装箱吊至码头前沿等待着的水平运输机械上;
(6)松开扭锁装置,吊具与集装箱分离;
(7)吊具起升,小车向海侧方向移动,进入下一个操作。
装船作业步骤:
(1)船靠码头前,将集装箱装卸桥运行至码头岸线的大致作业位置
(2)船靠码头后,将集装箱装卸桥移至具体的作业位置;
(3)按照装卸顺序,将小车移至水平运输机械上待装箱的正上方,放下吊具;
(4)吊具上的扭锁装置将集装箱锁定后,吊起水平运输机械上的集装箱;
(5)小车沿悬臂向海侧方向移动,将集装箱吊至船上的指定位置;
(6)松开扭锁装置,吊具与集装箱分离;
(7)吊具起升,小车向陆侧方向移动,进入下一个操作。
(三)集装箱装卸工艺概述
1.集装箱装卸工艺
所谓装卸工艺,是指港口装卸和搬运货物的方法和程序,按一定的操作过程,根据港口的条件,针对不同的货物、运输工具和装卸设备,以合理和经济的原则来完成装卸和搬运任务。
作业的高效性是集装箱码头最突出的优点,而装卸工艺是码头作业高效率的保证。其中,集装箱装卸作业应采用集装箱专用机械,而集装箱装卸所采用的程序则是指装卸工艺方案。集装箱装卸工艺是实现运输企业生产过程中集装箱位移的方法或程序,这种方法或程序是集装箱在整个搬运过程中所采用的工艺流程,是各种集装箱装卸机械之间相互配合作业的过程,也是运输企业集装箱装卸作业的基础。根据集装箱装卸作业的标准与集装箱装卸机械设备的组合形式,可产生不同的作业方式,这些方式就称为集装箱装卸工艺方案。因此,集装箱装卸工艺方案也是各种集装箱装卸机械、各种装卸作业方式的组合体。选择合理的工艺方案,可以提高集装箱运输企业的装卸作业效率,获得最佳的经济效益。
【温馨提示】
港口装卸工艺主要包括的内容:
(1)装卸机械设备类型的选择和吊索具的设计;
(2)工艺流程的合理化;
(3)货物在运输工具和库场上的合理配给和堆码;
(4)司机和工人的先进操作方法。
2.集装箱装卸工艺的发展
集装箱运输的产生,给集装箱装卸工艺带来深刻的变革。当美国海陆公司首先开展集装箱运输时,产生了一种新的作业方式,即底盘车工艺方案;当马托松公司首先采用岸边集装箱装卸桥时,又产生了另一种作业方式,即跨运车工艺方案;随着集装箱运输的发展,又相继产生了堆场龙门起重机工艺方案、叉车工艺方案、滚装作业方式等多种装卸工艺方案。
集装箱卸作业的生产效率,取决于装卸作业过程的作业机械化程度和管理水平,而这些又与集装箱装卸工艺方案的优劣有直接的联系。因此,要提高集装箱装卸作业的生产效率,就必须首先认真选择装卸机械和工艺方案。随着集装箱装卸作业的专业化和集装箱装卸工艺现代化的不断发展和完善,集装箱跨运车工艺方案和集装箱龙门起重机工艺方案,正成为当前最典型最成熟的工艺方案。
但是,随着集装箱运输的进一步发展、集装箱运量的日益增加和船舶的大型化,集装箱运输体系继续在探索新的集装箱装卸工艺方案,以适应当前集装箱运输的发展。
3.集装箱装卸工艺方案制定的目标
作为现代化的集装箱装卸工艺方案,它所追求的目标主要有:
(1)进一步提高船舶装卸效率。提高船舶装卸效率不仅能提高昂贵的集装箱船舶的营运效率.还能为货主减少货物流通所占用的时间(加速货物的流通),并且能为港口赢得更多的利润。
(2)提高土地资源的利用率。土地对各国开展集装箱运输的企业而言都是相当宝贵的,因此,每一个集装箱装卸工艺方案都应尽量使每一平方米的土地得到高效的利用。
(3)进一步使作业省力、简单。从装卸作业的合理化原则来考虑,作业环节越少,并且能够充分使用机械,其作业过程就越简单,并且越省力。集装箱装卸作业是一个较复杂和繁重的作业过程,因此,怎样能使作业过程简单化,并降低劳动强度,是一项艰巨的研究课题。集装箱装卸作业的半自动化和自动化是解决这一课题主要途径。现代集装箱运输中的集装箱装卸工艺方案,正是朝着这一方向探索和发展。
4.选择集装箱装卸工艺方案的原则
选择集装箱装卸工艺方案是集装箱运输企业经营者的一项重要决策,它直接影响到集装箱装卸效率的高低、投资的大小、集装箱集疏运的快慢及集装箱运输的成本。选择集装箱装卸工艺方案应遵守以下基本原则:
(1)有效地利用区域;
(2)加快集装箱船舶的周转;
(3)堆场和通道的合理布置;
(4)装卸机械机型的合理选择与配套;
(5)合理、有效的堆场作业方式;
(6)快速的信息处理能力;
(7)工艺方案的有效性(应以减少作业环节、减少倒载次数、减少人力操作、降低劳动强度为前提)。
事实上要同时满足上述要求是相当困难的,有时甚至是相互抵触的。集装箱运输企业的经营者应研究集装箱运输过程中各项原则的主次,最终选择一个符合实际要求的集装箱装卸工艺方案。
(四)集装箱码头装卸工艺
1.装卸桥——跨运车方案
这种工艺方案是码头前沿采用装卸桥,水平搬运及堆场作业时采用跨运车。跨运车系统作业流程可描述为:卸船时,由装卸桥将集装箱从船上卸到码头前沿,再由跨运车将集装箱搬运至码头堆场的指定箱位;装船时,集装箱从码头外送进码头堆场后,由跨运车将集装箱从堆场拖到码头前沿,由岸边集装箱装卸桥将箱吊装上船。如图4-14所示。

图4-15装卸桥——轮胎式龙门起重机方案示意图
轮胎式龙门起重机方式的主要优点:场地面积利用率高,装卸效率高,灵活性比较大,能适应铁路、公路车辆的运输;轮胎式龙门起重机可以说是一种增大了自由弯度和宽度的跨运车,它可跨1~7排集装箱和一条底盘车通道,能堆码1~4层集装箱;操作简便,便于实现自动化和电子计算机的管理。它比较适合于年通过量8~10万标准箱的集装箱码头使用。它的主要缺点:轮压比较大,一般为50t,故对场地要求高;对驾驶员操作技术要求高。
3.装卸桥——轨道式龙门起重机方案
这种工艺方案是通过装卸桥把集装箱从船卸到码头后再搬放到底盘车上,通过底盘车把集装箱运到堆场,堆场作业采用轨道式龙门起重机。轨道式龙门起重机的主要特点是机械沿轨道运行,具有能实现自动化控制的优点。与轮胎式龙门起重机相比,堆场堆箱的自由空间和宽度更大,在所有集装箱堆场机械中场地面积利用率最高,单位面积堆箱数最多,它可跨14排或更多排集装箱,堆码高度可达4~5层集装箱。其机械机构简单,操作比较可靠,但初始投资大。轨道式龙门起重机方式适合于年吞吐量10万TEU以上或两个以上连续泊位的集装箱码头使用。如图4-15所示。

图4-15装卸桥——轨道式龙门起重机方案示意图
4.装卸桥——底盘车方案
这种工艺方案是码头前沿采用装卸桥,水平搬运及堆场作业均采用底盘车。底盘车又叫拖挂车,根据其使用场所不同,分为一般公路用的和货场用的两种。一般公路上用的其长、宽、高外廓尺寸、轮压和轴负荷均应符合围家标准规定;货场运输用的其外廓尺寸一般可不受国家对于车辆限界的规定限制,但挂车的全长和轴负荷要考虑到码头货场道路的技术条件。采用底盘车方式是把从船上卸下来的集装箱直接安放在底盘车上。集装箱上底盘车后,用牵引车把它拖到场地,在场地上集装箱存放在挂车上,当需要进行内陆运输时,很方便地用牵引车将其拖走。如图4-16所示。

图4-16 装卸桥——底盘车方案示意图
这一方式与前几种方式比较,集装箱不落地,特别适合于公路四通八达的“门到门”运输方式。主要缺点:占地面积大(一般一个泊位需要22~25万m:的陆域);投资大(一般每个泊位平均需配备2 000~3 000辆挂车);由于不能重叠堆放,故场地面积利用率很低。
5.装卸桥——集装箱叉车方案
该方案是码头前沿采用装卸桥,水平搬运及场地采用叉车。集装箱叉车是集装箱码头上常用的一种装卸机械。一般码头前沿利用船机或门机进行装卸,码头前沿和堆场上的作业都用叉车。叉车除了进行场地码垛作业和短距离的搬运作业外,还可用来进行装卸车辆作业。当水平运输距离比较远时,可采用拖挂车配合作业。叉车作业要求比较宽敞的通道及场地,因此,场地面积利用率比较低。这种工艺方式较适合于年吞吐量3万TEU以下沿海件杂货泊位兼作集装箱泊位使用,或兼作修理箱场地和空箱场地作业。如图4-17所示。
图4-17装卸桥——集装箱叉车方案示意图
【实际应用】
全自动化集装箱码头
2014年12月23日,国内首个全自动化集装箱码头-----上海洋山深水港区四期工程正式开工建设。工程建成后,不仅将提升上海港集装箱吞吐能力,同时,以港口“智能装卸”和“无人码头”为代表,将推动上海港实现“质”的飞跃。
洋山深水港区是上海国际航运中心的核心工程,四期工程是洋山深水港区一期至三期工程的续建工程。洋山四期工程项目总投资约139亿元,泊位岸线长近2800米。共建设5个5万吨级和2个7万吨级集装箱泊位,码头结构均按靠泊15万吨级集装箱船设计和建设,以及工作船码头及必要的配套设施。工程设计年通过能力为630万TEU,近期为400万TEU。港区陆域总用地面积223.16万平方米,包括集装箱码头生产作业区、工作船码头基地、港外道路及支持系统等。
洋山四期工程是贯彻国家“一带一路”和长江经济带战略部署,促进上海自贸试验区建设的一大举措,也是加快推进上海国际航运中心建设,发挥重要枢纽港作用,巩固国际竞争优势的迫切需要。与传统码头不同的是,洋山四期将首次采用最新一代自动化集装箱装卸设备和一流的自动化生产管理控制系统,港口作业采用“双小车集装箱装卸桥+自动导引运输车+自动轨道式龙门起重机”的装卸工艺方案。未来,整个码头运营管理现场将看不到人,集装箱从船舶装卸到集卡上,再从集卡装卸至堆场,整个过程都由智能操作和系统自动调度,无需司机操控。
据悉,洋山四期工程预计2017年建成。届时,上海港的年吞吐量将突破4000万标准箱,将是全美国所有港口加起来的吞吐总量,也是目前全球港口年吞吐量的十分之一。与此同时,洋山四期港区将采用国际上最新一代自动化集装箱装卸设备和一流的自动化生产管理控制系统,洋山四期工程建成后,将大大缓解洋山港吞吐能力紧张的现状。目前洋山港每座桥吊每年平均作业已达到25万箱,而按照国际行业规范,一座桥吊一年完成15万箱作业,已算满负荷运作,因此洋山港扩容,刻不容缓。与传统码头不同的是,洋山四期将大量采用自动化信息技术,打造一座“无人码头”,集装箱车辆进出关卡,集装箱堆场堆放,甚至桥吊装卸业务,都将在无人操作的情况下完成,上海自贸试验区口岸通关效率将进一步提升。

