7.2.1线性系统的表示方法
1. 连续时间系统
线性时不变系统(LTI系统)的典型表达式有常系数微分方程、传递函数、状态方程等。
(1)常系数微分方程

向量 是连续系统常系数微分方程的系数向量,可以用向量表示该系统。
是连续系统常系数微分方程的系数向量,可以用向量表示该系统。
(2)传递函数模型
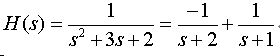
传递函数模型零初始条件下,输出量的拉普拉斯变换与输入量的拉普拉斯变换之比。

在Matlab中,传递函数用分子、分母两个多项式的系数向量b、a表示,系数是降幂排列,缺项用0补齐,或用sys=tf(b,a)函数表示。
(3)零极点增益模型
对传递函数进行因式分解,可将传递函数模型改写为零极点增益模型。


此外,还有极点留数模型、二次分式模型、状态空间模型表示。

程序如下:
num=1;
den=[1 3 2];
sys=tf(num,den)
执行后输出:
sys =
1
-------------
s^2 + 3 s + 2
Continuous-time transfer function.
z=roots(num);
p=roots(den);k=1;
sys=zpk(z,p,k)
执行后输出:
sys =
1
-----------
(s+2) (s+1)
Continuous-time zero/pole/gain model.
[r,p,k]=residue(num,den) %极点留数模型
执行后输出:
r =
-1
1
p =
-2
-1
k =
[]
结果表示:
2. 离散时间系统
离散时间系统可以用时域和频域两种方法描述。线性时不变系统(LTI系统)的典型表达式有差分方程、传递函数、零极点增益模型等等。
(1)差分方程
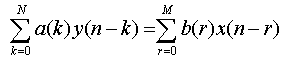
在时域,LTI系统的输入输出关系可以用差分方程表示。即
2. 离散时间系统
离散时间系统可以用时域和频域两种方法描述。线性时不变系统(LTI系统)的典型表达式有差分方程、传递函数、零极点增益模型等等。
(1)差分方程
在时域,LTI系统的输入输出关系可以用差分方程表示。即
2)传递函数
离散LTI系统的传递函数定义为系统输出的Z变换与系统输入的Z变换之比。

在Matlab中,零极点增益模型用增益系数、零点向量、极点向量来表示。
此外,还有极点留数模型、二次分式模型、状态空间模型表示。
7.2.2系统模型的转换
应用系统模型的转换函数可以实现传递函数模型、零极点增益模型、状态空间模型、二次分式模型的相互转化。具体的系统模型的转换函数见表7-1。
表7-1 系统模型的转换函数
| 函数名 | 功能说明 |
| ss2tf | 状态方程模型转换为传递函数模型 |
| ss2zp | 状态方程模型转换为零极点增益模型 |
| ss2sos | 状态方程模型转换为二次分式模型 |
| tf2ss | 传递函数模型转换为状态方程模型 |
| tf2zp | 传递函数模型转换为零极点增益模型 |
| tf2sos | 传递函数模型转换为二次分式模型 |
| zp2tf | 零极点增益模型转换为传递函数模型 |
| zp2ss | 零极点增益模型转换为状态方程模型 |
| zp2sos | 零极点增益模型转换为二次分式模型 |
| sos2tf | 二次分式模型转换为传递函数模型 |
| sos2zp | 二次分式模型转换为零极点增益模型 |
| sos2ss | 二次分式模型转换为状态方程模型 |

>> num=[1];den=[1,3,2];
>> [num,den]=eqtflength(num,den) ;
>> [z,p,k]=tf2zp(num,den)
z =
0
0
p =
-2
-1
k =
1