固定翼无人机的操纵性
上一节
下一节
固定翼无人机操纵性
自学任务
电子教材
固定翼无人机的操纵性
★重点内容:固定翼无人机操纵性的定义:
固定翼无人机的操纵性是指固定翼无人机在自动驾驶仪操纵指令下,由操纵伺服机构系统操纵各种舵面机构,改变其飞行状态的特性。
(自动驾驶仪是依靠开源飞控平台搭建的,在飞行过程中根据自动调整无人机的飞行姿态。
伺服机构是一种系统,其中被控量为机械位置。)

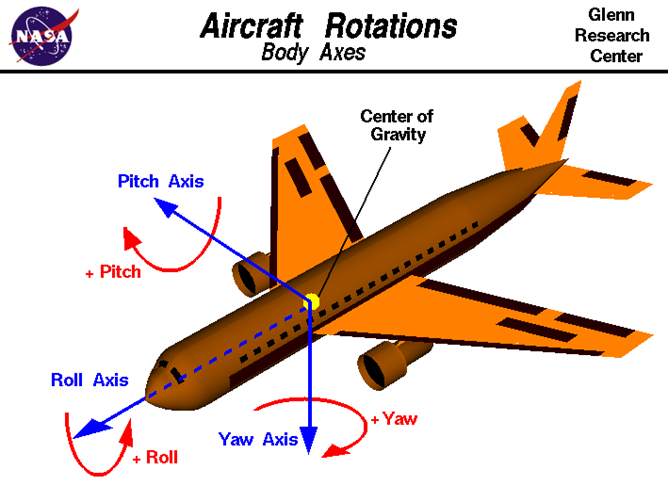
固定翼无人机的三个操纵面★重点内容

三个转动轴
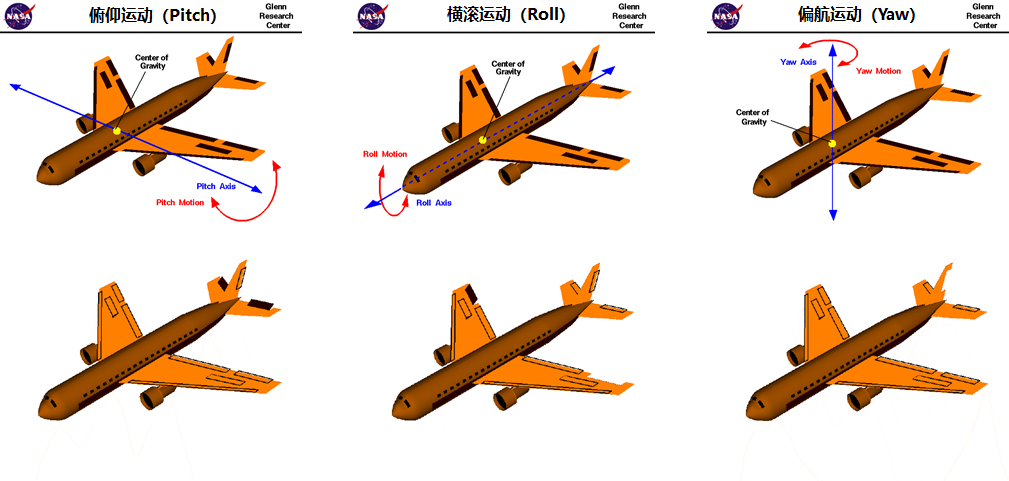
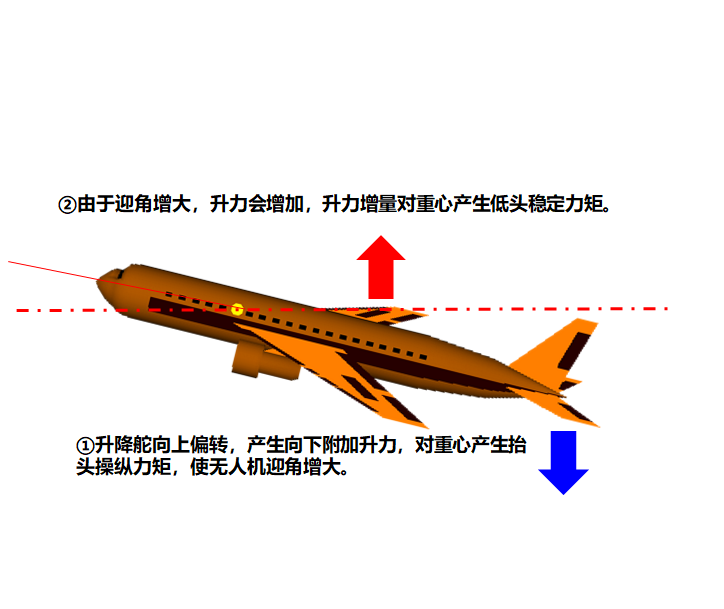
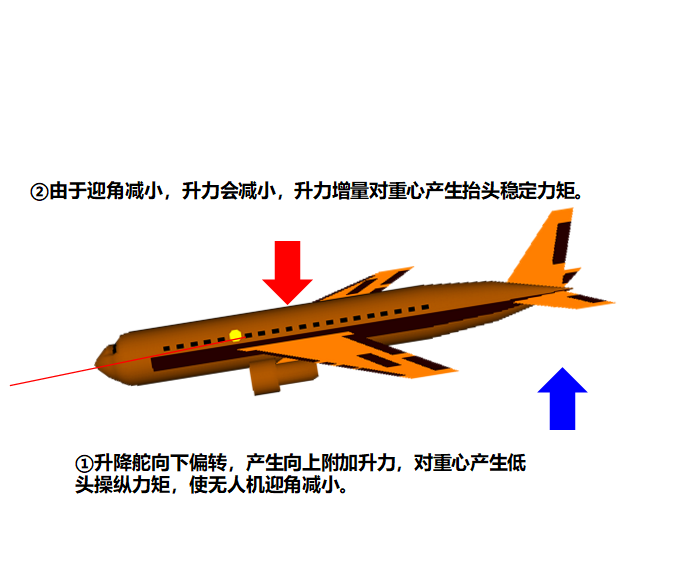
固定翼无人机的纵向操纵性★重点内容
固定翼无人机的方向操纵性★重点内容
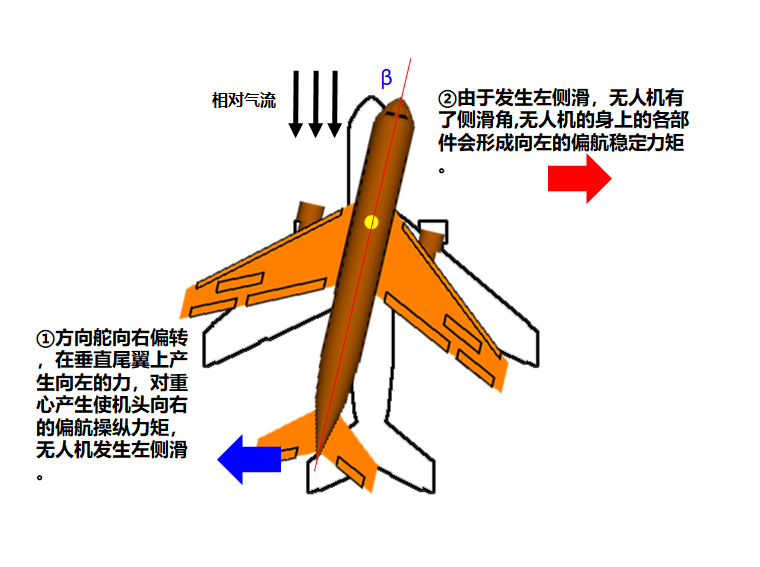
固定翼无人机的方向操纵性★重点内容
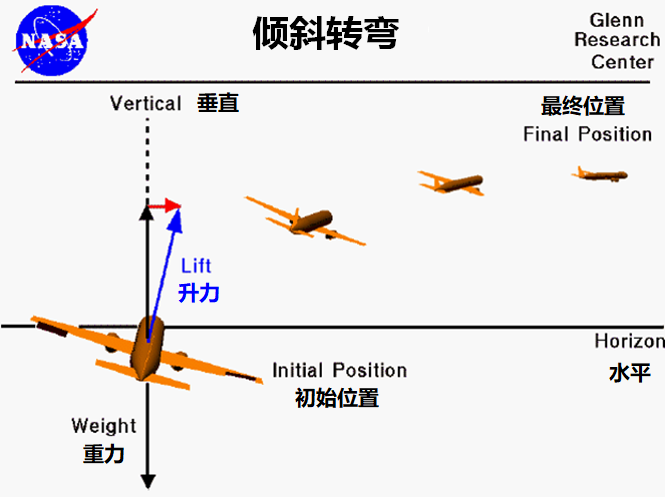
固定翼无人机的横向操纵性
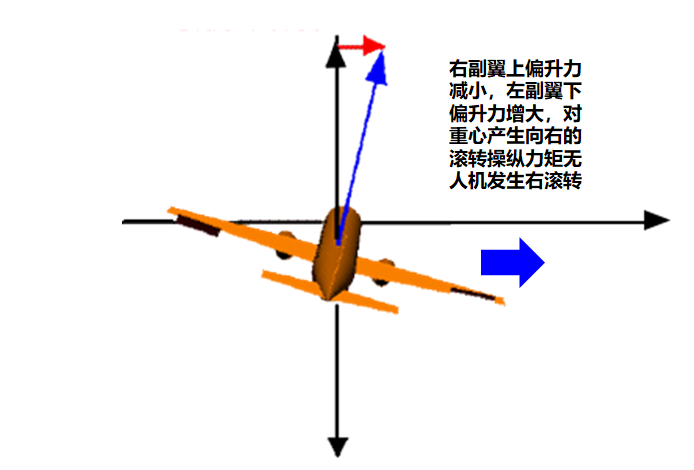
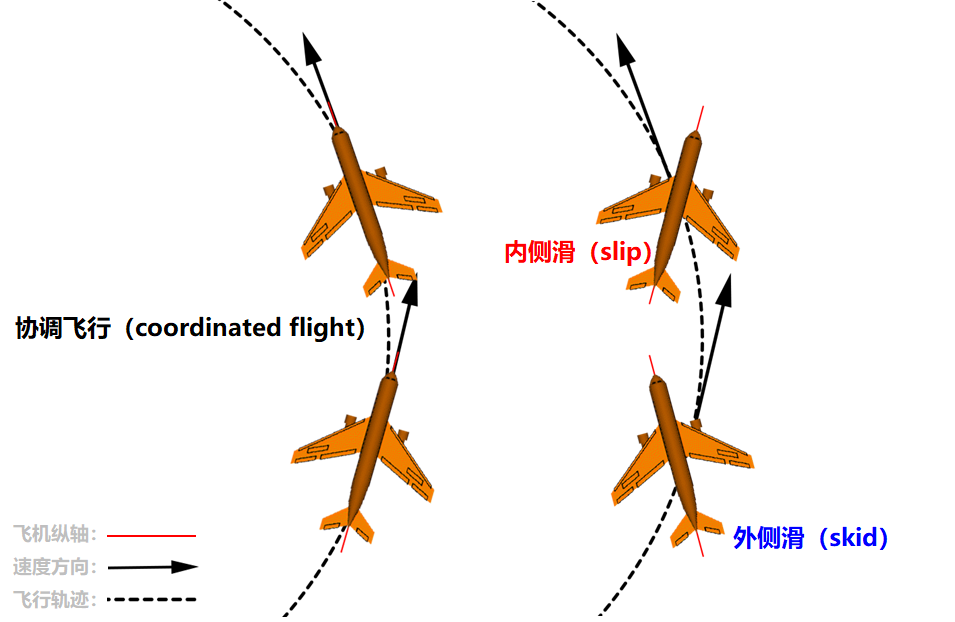
固定翼无人机的侧向(横向+方向)操纵性★重点内容
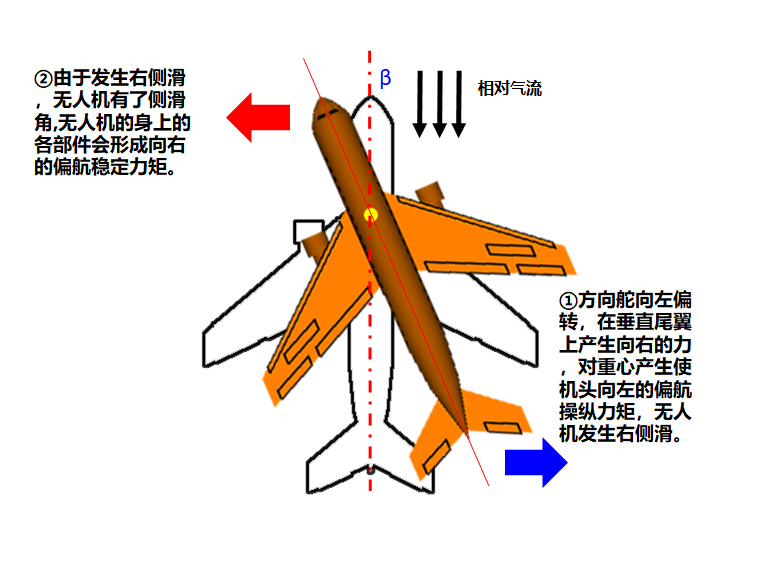
固定翼无人机的方向操纵性★重点内容
影响固定翼无人机操纵性的因素
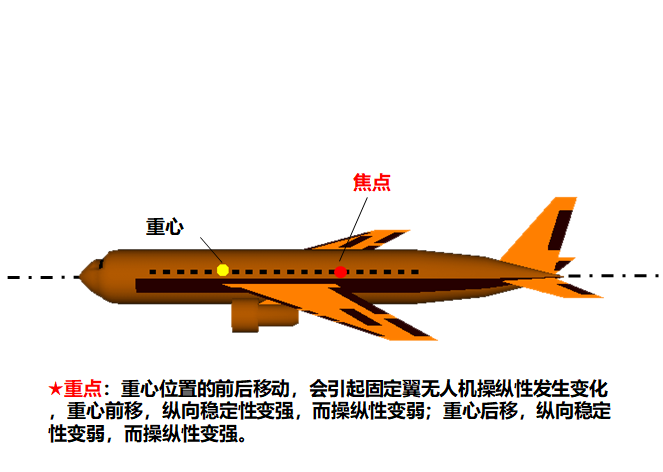
重心位置对固定翼无人机操纵性的影响
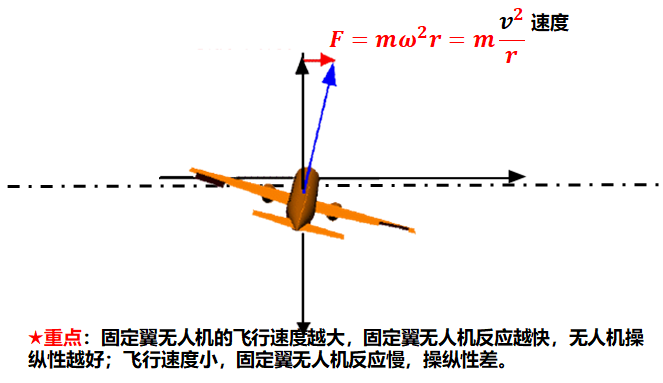
速度变化对固定翼无人机操纵性的影响
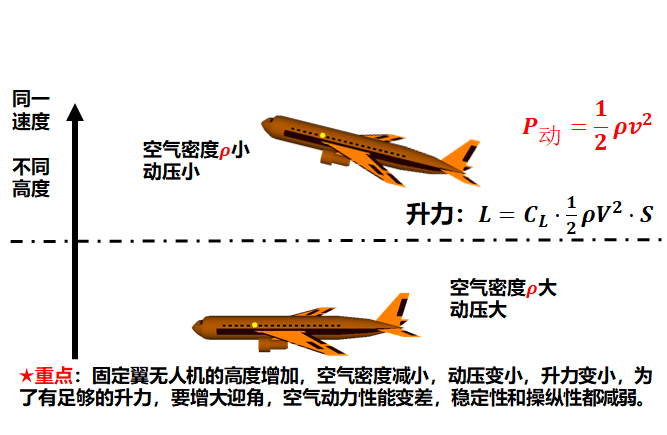
高度变化对固定翼无人机飞行操纵性的影响
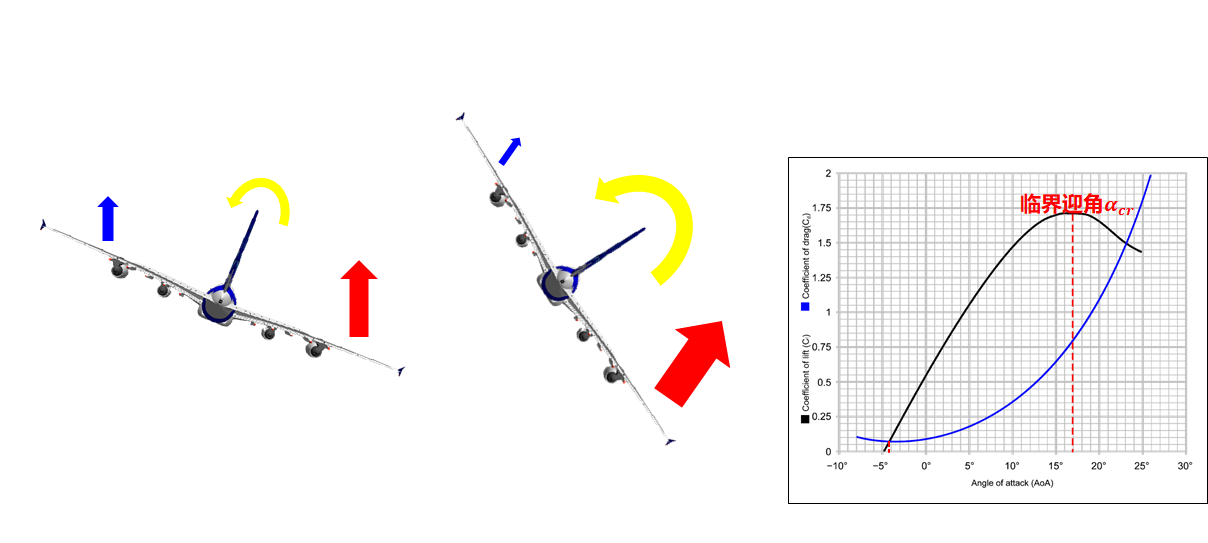
迎角变化对固定翼无人机横向操纵性的影响
小迎角两翼阻力之差小,向左的滚转力矩小,左侧滑角也小。
大迎角两翼阻力之差大,向左的滚转力矩大,左侧滑角也大。
滚转力矩越大,侧滑作用越强烈,操纵性越差。