实验二 线性系统串联校正的数字仿真
上一节
下一节
一、实验目的
1、 熟悉串联校正装置对线性系统稳定性和动态特性的影响。
2、 熟悉SIMULNK仿真环境。
3、 掌握串联校正装置的设计方法和参数调试技术。
二、实验内容
1、 对未校正系统的稳定性和动态特性进行数字仿真。
2、 按照动态特性要求设计串联校正装置。
3、对加串联校正装置后系统的稳定性和动态特性进行数字仿真,并观察校正装置参数改变对系统性能的影响。
三、实验步骤
1、在SIMULINK仿真环境中建立一个未加校正的二阶闭环系统的模型,完成该系统在阶跃信号输入时的动态特性仿真和稳定性分析;
2、按动态要求设计串联校正装置传递函数  ;
;
3、在SIMULINK仿真环境中建立一个加串联校正后的二阶闭环系统的模型,完成该系统在阶跃信号输入时的动态特性仿真和稳定性分析;
4、改变串联校正装置传递函数的参数,对加校正后的二阶闭环系统进行调试,使其性能指标满足预定要求;
5、分析实验结果,完成实验报告。
四、实验思考
1、 根据附录中的系统框图写出校正前后系统的传递函数,并通过计算机仿真画出其伯德图;
2、进行计算机仿真,并记录校正前后系统的阶跃响应曲线,并根据曲线求得系统的最大超调量和调整时间,判断校正后系统是否满足附录中对校正后系统性能指标的要求。
五、附录
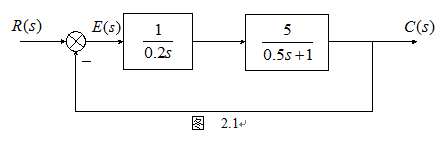
1、仿真实验用未加校正的二阶闭环系统的方框图如图2.1所示。其动态指标为: 。
。
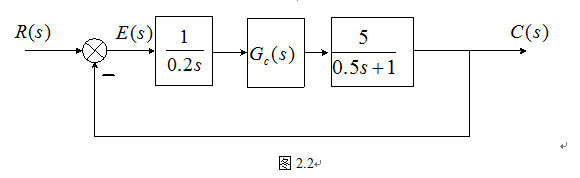
2、 要求加串联校正装置后系统满足以下性能指标:
3、加入串联校正装置后的系统方框图如图2.2所示,其中,