
传感器数据处理途径
传感器的输出类型有电压型和电流型,对应的输出信号类型分为0-5V\0-10V\4-20mA,采集数据如何转换成实际环境值呢?接下来,以温度传感器为例叙述。
1.电压型输出信号转换计算
例如量程-40~+80摄氏度,0-10V输出,当输出信号为5V时,计算当前温度值。此温度量程的跨度为120度,用10V电压信号来表达,120度/10V=12度/V,即电压1V代表温度变化12度.测量值5V-0V=5V.5V12度/V=60度。60+(-40)=20度,当前温度为20度。
2.电流型输出信号转换计算
例如量程-40~+80摄氏度,4~20mA输出,当输出信号为12mA时,计算当前温度值。此温度量程的跨度为120度,用16mA电流信号来表达,120度/16mA=7.5度/mA,即电流1mA代表温度变化7.5度.测量值12mA-4mA=8mA.8mA7.5度/mA=60度。60+(-40)=20度,当前温度为20度。
对于输出 0~20mA 的传感器,在电路设计上我们只需选择合适的降压电阻,通过 A/D 转换器直接将电阻上的电压转换为数字信号即可,电路调试及数据处理都比较简单。对于输出 4~20mA 的传感器,电路调试及数据处理上都比较烦琐。但这种传感器能够在传感器线路不通时,通过是否能检测到正常范围内的电流,判断电路是否出现故障,因此使用更为普遍。
常用的传感器
由于传感器涉及技术领域宽泛,学科交叉复杂,并且关于传感器原理、技术、设计、产品等介绍的书籍也很多,所以本节不再对传感器原理、技术和设计等做详细的介绍,而是从不同角度选择一部分常用的传感器,简要介绍其相关知识。
霍尔传感器
霍尔传感器是根据霍尔效应制作的一种磁场传感器,广泛地应用于工业自动化技术、检测技术及信息处理等方面。霍尔效应是研究半导体材料性能的基本方法,通过霍尔效应实验测定的霍尔系数,能够判断半导体材料的导电类型、载流子浓度及载流子迁移率等重要参数。
霍尔传感器分为线性型霍尔传感器和开关型霍尔传感器两种。
1、线性型霍尔传感器由霍尔元件、线性放大器和射极跟随器组成,输出模拟量。
2、开关型霍尔传感器由稳压器、霍尔元件、差分放大器,斯密特触发器和输出级组成,输出数字量。

霍尔传感器
激光传感器
激光传感器是利用激光技术进行测量的传感器,它由激光器、激光检测器和测量电路组成。激光传感器是新型测量设备,它的优点是能实现无接触远距离测量,速度快、精度高、量程大、抗光、电干扰能力强等。
激光传感器工作时,先由激光发射二极管对准目标发射激光脉冲,经目标反射后激光向各方向散射,部分散射光返回到传感器接收器,被光学系统接收后成像到雪崩光电二极管上。雪崩光电二极管是一种内部具有放大功能的光学传感器,它能检测极其微弱的光信号,并将其转化为相应的电信号。利用激光的高方向性、高单色性和高亮度等特点可实现无接触远距离测量。激光传感器常用于长度、距离、振动、速度、方位等物理量的测量。


激光传感器 谷歌无人车配备激光传感器
陀螺仪传感器
陀螺仪是用来固定一个方向的。就像旋转的陀螺放在一个平面上,不论将这个平面如何倾斜,陀螺的中心轴的方向总是会保持不变。陀螺仪的原理是,一个旋转物体的旋转轴所指的方向在不受外力影响时,是不会改变的。人们根据这个道理,用它来保持方向,制造出来的东西就叫陀螺仪。陀螺仪在工作时要给它一个力,使它快速旋转起来,一般能达到每分钟几十万转,可以工作很长时间。然后用多种方法读取轴所指示的方向,并自动将数据信号传给控制系统。
在手机里装陀螺仪传感器,就能凭空固定一个方向,无论手机如果移动,这个方向总是保持不变。例如在一些手机射击游戏中,射击准心就是不变的,然后手机使用者可以通过移动手机位置,来瞄准目标。陀螺仪传感器原本是运用到直升机模型上的,现在已经被广泛运用于手机这类移动便携设备上。最先将陀螺仪传感器引入手机的是苹果公司,后续各大手机厂商才纷纷跟进,陀螺仪传感器一定程度上也为苹果的骄人战绩做了赫赫战功。陀螺仪传感器也是现代航空、航海、航天和国防工业应用中的必不可少的控制装置。
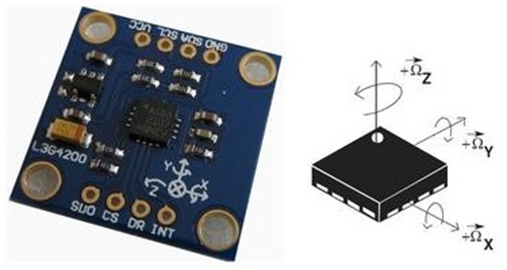
陀螺仪传感器
热红外人体感应器和热释电红外传感器
热红外人体感应器好像一只猫的眼睛,只要人接近到一定的距离,就能开启灯光或打开防盗报警。热红外人体感应器是一种可探测静止人体的红外热释感应器,由透镜,感光元件,感光电路,机械部分和机械控制部分组成。通过机械控制部分和机械部分,带动红外感应部分做微小的左右或圆周运动,移动位置,使感应器和人体之间能形成相对的移动。所以无论人体是移动还是静止,感光元件都可产生极化压差,感光电路发出有人的识别信号,达到探测移动或静止人体的目的。


热红外人体感应器 热释电红外传感器
由探测元件将探测并接收到的红外辐射转变成微弱的电压信号,经装在探头内的场效应管放大后向外输出。为了提高探测器的探测灵敏度以增大探测距离,一般在探测器的前方装设一个菲涅尔透镜,该透镜用透明塑料制成,将透镜的上、下两部分各分成若干等份,制成一种具有特殊光学系统的透镜,它和放大电路相配合,这样就可以测出20米范围内人的行动。菲涅尔透镜利用透镜的特殊光学原理,在探测器前方产生一个交替变化的“盲区”和“高灵敏区”,以提高它的探测接收灵敏度。当有人从透镜前走过时,人体发出的红外线就不断地交替从“盲区”进入“高灵敏区”,这样就使接收到的红外信号以忽强忽弱的脉冲形式输入,从而强其能量幅度。人体辐射的红外线中心波长为9~10um,而探测元件的波长灵敏度在0.2~20um范围内几乎稳定不变。在传感器顶端开设了一个装有滤光镜片的窗口,这个滤光片可通过光的波长范围为7~10um,正好适合于人体红外辐射的探测,而对其它波长的红外线由滤光片予以吸收,这样便形成了一种专门用作探测人体辐射的红外线传感器。
超声波测距离传感器
超声波测距离传感器采用超声波回波测距原理,运用精确的时差测量技术,检测传感器与目标物之间的距离。采用小角度,小盲区超声波传感器,具有测量准确、无接触、防水、防腐蚀、低成本等优点,可应于液位、物位检测,工业过程控制等。


超声波测距传感器 超声波测距技术在智能停车场的应用

