
案例6.3 全自动旋盖机系统
上一节
案例6.3 全自动旋盖机系统
早期旋盖机多采用人工包装,操作繁琐、单调、重复,工人劳动强度大,包装质量不高。有些材料长期与人接触还会影响身体健康。包装自动化能改善工作条件,特别是对有毒性、刺激性、低温潮湿性、飞扬扩散性等危害人体健康的物品的包装尤为重要。企业采用全自动旋盖机还能大大减少人工成本、提高生产效率、实现企业的自动化生产。
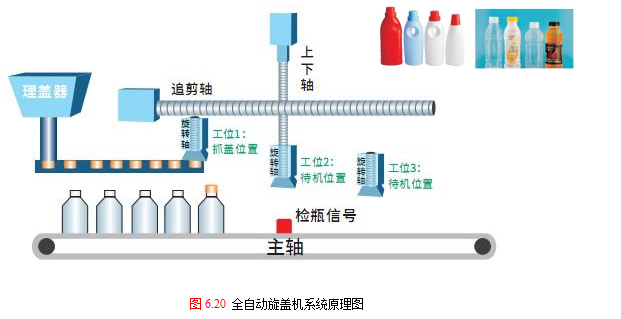
全自动旋盖机系统原理如图6.20所示。 首先系统启动后复位;自动运行时,如果夹爪里没有瓶盖则去工位1抓盖位置抓取瓶盖,再回到工位2待机处,如果有瓶盖则等待检瓶信号。当检瓶信号到达,追剪轴追赶瓶子,达到同步时开始向下旋瓶盖,当到达工位3旋瓶最低位置时松夹爪,返回工位1抓盖位置,继续下一个循环。
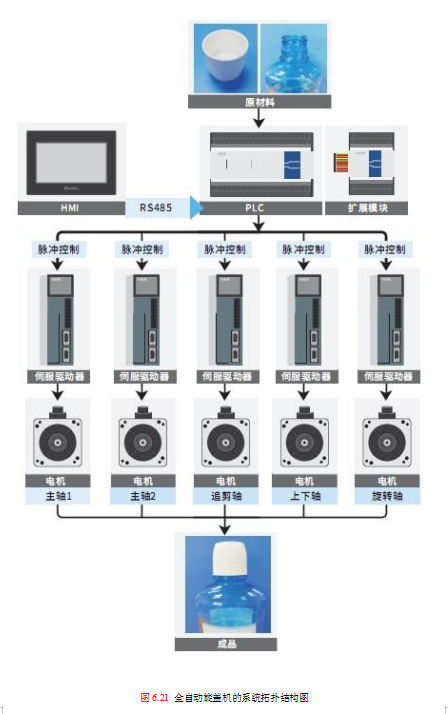
全自动旋盖机的系统拓扑结构如图6.21所示。
实际应用的现场设备入如6.22所示。

此设备采用信捷自行开发的自定义跳转凸轮功能,曲线柔和,运行平稳; 参数开放度高,各部分速度可调节,保证各种宽度的瓶灌不漏瓶; 瓶盖之间的距离可设,增加了旋盖的种类; 曲线柔和,伺服负载消耗小; 跳转自定义凸轮,各轴配合度高,速度快,提升效率。

