第21-1课 任务5.1 单片机控制及接口技术
主要内容:
1.讲解课前的2个案例,了解单片机的应用,认识什么是单片机。
案例1单片机的应用(3 : 32 ) .mp4
案例2什么是单片机(2: 54) .mp4
2. 观看视频,教师在线答疑
5.1单片机控制及接口技术( 19:55 ) .mp4
3. 指导学生:
5.1 [任务实施] 用运动控制卡控制步进电动机.doc
4.完成课后作业
【任务描述】
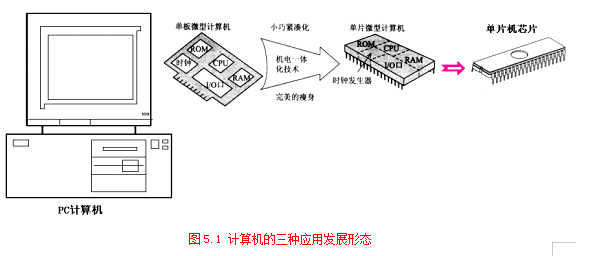
单片机是指一个集成在一块芯片上的完整计算机系统。它具有一个完整计算机所需要的大部分部件:CPU、内存、内部和外部总线系统,同时集成诸如通讯接口、定时器,实时时钟等外围设备。由于该系统是由单一芯片构成的,所以简称单片机(singlechip)。计算机的三种应用发展形态如图5.1所示。
本任务介绍单片机的应用,了解以ARM单片机为微控器组成的控制系统及其接口技术。完成本任务,可实现以下任务目标。
【任务目标】
技能目标
会以ARM单片机为微控器组成的控制系统的接线。
知识目标
(1)了解单片机的应用;
(2)了解以ARM单片机为微控器组成的控制系统的接口。
建议学时:1个学时
在开始学习本节知识之前,同学们观看以下视频,了解单片机的应用,认识什么是单片机。
(注:本部分所有视频只用于辅助教学,不产生任何经济效益,如有侵权,请告知)
观看视频: 案例1 单片机的应用(3:32)
观看视频: 案例2 什么是单片机(2:54)
观看完视频,大家都看懂了吗?如有疑问,咱们到“知识要点”部分找答案吧。
一、单片机的应用及种类
目前单片机渗透到我们生活的各个领域,几乎很难找到哪个领域没有单片机的踪迹。
飞机上各种仪表的控制,计算机的网络通讯与数据传输,工业自动化过程的实时控制和数据处理,广泛使用的各种智能IC卡,民用豪华轿车的安全保障系统,录像机、摄像机、全自动洗衣机的控制,以及程控玩具、电子宠物、自动控制领域的机器人、智能仪表、医疗器械以及各种智能机械等等,都离不开单片机。此外,单片机在工商,金融,科研、教育,国防航空航天等领域都有着十分广泛的用途。
按单片机处理的字长,即每次能够处理的二进制的位数,有4位,8位,16位,32位单片机,位数越多,处理速度越快,运算能力越高,价格也越高。单片机的选用不是位数越多,功能越多就越好,他们各自有自己的应用领域,各有专长。
二、ARM单片机
ARM单片机是以ARM处理器为核心的一种单片微型计算机,如图5.2所示。是近年来随着电子设备智能化和网络化程度不断提高而出现的新兴产物。

三、单片机控制系统接口技术(以ARM单片机为微控器组成的控制系统为例)
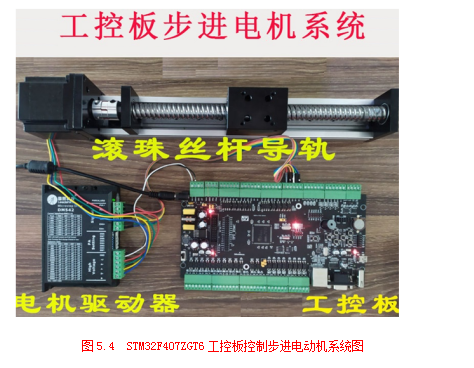
以ARM单片机为微控器组成的STM32F407ZGT6工控板控制步进电动机系统如图5.4所示。STM32F407ZGT6工控板的接口如图5.5所示。

(1)USB接口技术
(2)RS-232串行通信接口技术
(3)RS-485串行通信接口技术
(4)CAN接口技术
观看视频: 5.1 单片机控制及接口技术(19:52)
【任务实施】 用运动控制卡控制步进电动机
实训目的:采用3D打印机32位主板 MKS Robin Nano V1.2控制板(配置 TFT35显示屏触)作为控制器,控制步进电动机。
实训设备:实训设备如表5.1所示。
表5.1 实训设备表
实训设备名称 | 规格 | 数量 |
步进电动机 | 42系列两相四线步进电动机 | 1 |
单片机控制器 | 32位主板 MKS Robin Nano V1.2控制板(配置 TFT35显示屏触) | 1 |
步进电动机驱动器 | 数字式DM542驱动器 | 1 |
直流电源 | 输入AC220V,输出DC24V | 1 |
导线 |
| 若干 |
实训步骤:
(1)阅读控制器、步进电动机及其驱动器使用说明书,认识各自的接口及功能。
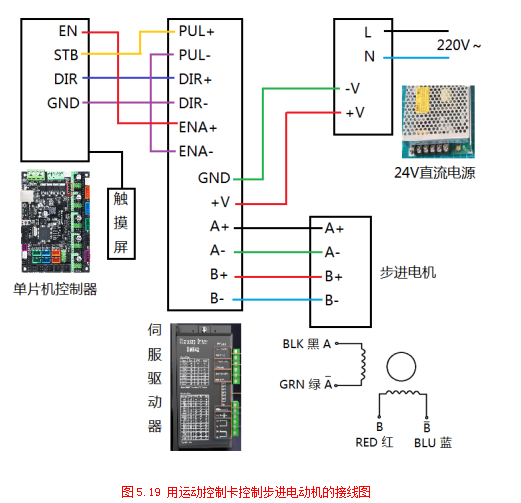
(2)按照图5.19连接直流电源/控制器、驱动器和步进电动机。接线完成的实物如图5.20所示。
(3)通电调试,按触摸屏上面的“正转”按键或“反转”按键观察电动机的转向和转速。

实训设备网址(参考):
1.单片机控制 网址:
https://detail.tmall.com/item.htm?ali_trackid=2:mm_119871216_18360754_111380096:1679124335_086_1480894474&bxsign=tbkHpv7FOWR6nr-djOI2IqVmuzYrQDjlknyc5drnH8k_cLKDXLN7vzGohqr424tMjQ20IF8Zi4q4iJoWRcnAEwJdG7G1yM2xZAraVH1WRf6-v-tkA6KhukS8LGey0S92FdAaLLVWeh5k7phtcPJ9nG57A&id=685182986259&skuId=4896991033905&spm=a2e1u.27655827.d1661933647166.112&union_lens=lensId:OPT@1679124204@2127e808_0a11_186f39a0c74_5335@01@eyJmbG9vcklkIjo2MTc4NH0ie;recoveryid:201_33.7.200.130_12489976_1679110224927;prepvid:201_33.54.90.255_10043883_1679124114724适用3D打印机32位主板 MKS Robin Nano V1.2控制板 TFT35显示屏触
2. 24V直流电源 网址
3. 两相4线步进电动机 网址
4. 驱动器 网址
https://detail.tmall.com/item.htm?abbucket=20&id=704541673419&ns=1&spm=a230r.1.14.1.729b2f615srbBy
【任务评价】
简答题
1.叙述单片机的编程软件有哪两种;按单片机处理的字长分为哪几种,各有什么特点?应用最为广泛的是哪种?
2.叙述USB接口类型;
3.简述RS-232串行通信接口技术;
4.简述RS- 485串行通信方式;
5.简述CAN接口技术。
教师根据学生阅读记录结果及接线情况给予评价,见表5.2。
表5.2 任务评价表
实训项目 |
项目内容 | 配分 | 得分 |
步进电动机的观察 | 认识各个接线端子 | 10 |
|
步进电动机驱动器的观察 | 认识各个接线端子 | 10 |
|
单片机控制器的观 | 认识各个接线端子 | 10 |
|
24V直流开关电源的观察 | 认识各个接线端子 | 10 |
|
直流电源、控制器、步进电动机、驱动器的接线 | 会正确接线 | 40 |
|
其他 | 安全操作规程遵守情况;纪律遵守情况; | 10 |
|
工具的整理与环境清洁 | 10 |
|
工时:1学时 | 教师签字: | 总分 |
|
理论项目 |
项目内容 | 配分 | 得分 |
叙述单片机的工作原理及应用; | 20 |
|
叙述USB接口类型; | 20 |
|
简述RS-232串行通信接口技术; | 20 |
|
简述RS-485串行通信方式; | 20 |
|
简述CAN接口技术。 | 20 |
|
时间:1学时 | 教师签字: | 总分 |
|
“理论项目”参考答案
1.叙述单片机的编程软件有哪两种;按单片机处理的字长分为哪几种,各有什么特点?应用最为广泛的是哪种?
(1)单片机的编程软件有汇编语言,C语言。
(2)按单片机处理的字长,即每次能够处理的二进制的位数,有4位,8位,16位,32位单片机,位数越多,处理速度越快,运算能力越高,价格也越高。单片机的选用不是位数越多,功能越多就越好
4位单片机主要应用在计算器、家用电器上。
8位单片机控制功能较强,品种最为齐全,应用最广,主要应用在工业控制,智能仪表,家用电器,办公自动化等。
16位单片机的运算速度高于8位机,主要用在过程控制,智能仪表,家用电器等。主其中以MSP430性能优越,应用广泛。
32位单片机是单片机的顶级产品,具有极高的运算速度。主要应用于汽车,航空航天,高级机器人,军事装备等方面。
(3)ARM单片机占了绝大部分的市场,应用最广泛。
2.叙述USB接口类型;
USB是通用串行总线(Universal Serial Bus)的缩写。是一种串口总线标准,也是一种输入输出接口的技术规范,被广泛地应用于个人电脑和移动设备等信息通讯产品,并扩展至摄影器材、数字电视(机顶盒)、游戏机等其它相关领域。最新一代是USB4,传输速度为40Gbit/s,三段式电压5V/12V/20V,最大供电100W ,新型Type C接口允许正反盲插。
3.简述RS-232串行通信接口技术;
RS-232接口,是现在主流的计算机通用串行接口之一,是符合美国电子工业联盟(EIA)制定的串行数据通信的接口标准;原始编号全称是EIA-RS-232(简称232,RS232),也就是通常我们所说的com口,主要用于计算机与外部设备之间的通讯连接。RS是推荐标准的简称。RS232电缆的两端,一端为公头( DB9针式),一端为母头( DB9孔式),如图5.12所示。
RS-232接口有DB25接口和DB9接口两种,现在普通使用的基本上都是DB9接口,DB25接口基本上不再使用。
4.简述RS- 485串行通信方式;
为改进RS-232通信距离短、速率低的缺点,EIA在基于RS-422的基础上制定了RS-485接口标准。RS485是平衡发送和差分接收,因此具有抑制共模干扰的能力,它的最大传输距离为1200米,实际可达3000米,传输速率最高可达10Mbit/s。所以,一般在要求通信距离为几十米到上千米时,会广泛采用RS-485串行通信。
RS-485有通信方式有两种,一种是半双工模式,只有DATA+和DATA-两线;另一种是全双工模式,有四线传输信号: T+ ,T- ,R+ , R-。全双工模式时可认为是RS-422。
5.简述CAN接口技术。
CAN是控制器局域网络(Controller Area Network, CAN)的简称,是由德国Bosch公司在1986年为汽车监测和控制而设计的。属于现场总线的范畴,是一种高性能、高可靠性、易于开发和低成本的串行总线。


