第17课 4.4交流伺服电动机驱动控制
主要内容:
1.讲解课前的4个案例,理解旋转磁场的产生,了解异步电动机和同步电动机的原理。
案例1旋转磁场的产生(2:29 ) .mp4
案例2步电动机原理中文字幕(6:36 ) .mp4
案例3单相交流异步电动机工作原理( 4 :00) .mp4
案例4交流永磁同步电动机的生产过程(2:19) .mp4
2. 观看视频,教师在线答疑
4.4.1感应型交流伺服电动机( 29 : 04 ) .mp4
4.4.2交流永磁同步伺服电动机(06 : 25 ) .mp4
4.4.3交流伺服电动机的特点与应用( 06 : 22 ) .mp4
3. 指导学生:
4.4 [任务实施] 交流伺服电动机JOG (空载)模式运行.doc
4.完成课后作业
【任务描述】
近年来随着交流驱动技术的飞速发展,交流伺服电动机的转速和转矩控制性能,已经达到了可以与直流伺服电动机相当的水平。交流伺服电动机与直流伺服电动机相比有以下特点:
(1)没有炭刷与换向器,不易产生火花,因而维护少、寿命长;
(2)转子重量轻体积小,转动惯量小、响应快;
(3)适宜高速度、高精度、频繁起动场合。
交流伺服电动机分为感应型交流伺服电动机(异步电动机)和同步型交流伺服电动机(交流永磁同步电动机)。
本任务介绍感应型交流伺服电动机和交流永磁同步伺服电电动机的结构、工作原理及驱动控制原理,完成本任务,可实现以下任务目标:
【任务目标】
技能目标
会交流伺服电动机驱动控制接线。
知识目标
(1)掌握感应型交流伺服电动机的结构、工作原理及驱动控制原理;
(2)掌握交流永磁同步伺服电动机的结构、工作原理及驱动控制原理。
(3)了解交流伺服电动机的特点及应用
建议学时:2个学时
在开始学习本节知识之前,同学们观看以下视频,理解旋转磁场的产生,了解异步电动机和同步电动机的原理。
(注:本部分所有视频只用于辅助教学,不产生任何经济效益,如有侵权,请告知)
观看视频: 案例1 旋转磁场的产生(2:29)
观看视频: 案例2 异步电动机原理(中文字幕)(6:36)
观看视频: 案例3 交流永磁同步电机的生产过程(2:19)
观看视频: 案例4 单相交流伺服电动机工作原理(4:00)
观看完视频,大家都看懂了吗?如有疑问,咱们到“知识要点”部分找答案吧。
4.4.1 感应型交流伺服电动机(异步电动机)
随着电力电子技术、微处理器技术与磁场定向控制技术的快速发展,使感应电动机可以达到与他励式直流电动机相同的转矩控制特性,另外感应电动机本身价格低廉、结构坚固及维护简单,因此感应电动机逐渐在高精密速度及位置控制系统中得到越来越广泛的应用。
1.感应型交流伺服电动机结构与工作原理
结构 感应型交流伺服电动机一般是单相交流电动机,主要由定子和转子构成。定子铁心通常用硅钢片叠压而成。定子铁心槽内嵌有两个绕组,一个绕组是励磁绕组f,另一个绕组是控制绕组k,两个绕组在空间位置上互差90°电角度。工作时励磁绕组 f 与交流励磁电源Uf相连,控制绕组k加控制信号电压Uk。感应型交流伺服电动机外型如图4.52(a)所示,工作原理如图4.52(b)所示。其转子一般分为鼠笼转子和杯形转子两种结构型式。鼠笼转子和三相鼠笼式电动机的转子结构相似,如图4.52(c)所示,杯形转子结构如图4.52(d)所示。杯形转子通常用铝合金或铜合金制成空心薄壁圆筒,为了减小磁阻,在空心杯形转子内放置固定的内定子。不同结构型式的转子都制成具有较小惯量的细长形。

工作原理 交流伺服电动机在没有控制电压时,气隙中只有励磁绕组产生的脉动磁场,转子上没有启动转矩,转子静止不动。当有控制电压且控制绕组电流和励磁绕组电流不同相时,则在气隙中产生一个旋转磁场,转子导体切割这个旋转磁场的磁力线产生感应电动势,由于转子绕组是短路的,转子导体中便有电流流过。转子载流导体在磁场中受到电磁力f的作用,并产生电磁转矩,使转子沿着旋转磁场的方向旋转。当励磁绕组和控制绕组所加的交流电压幅值相等、相位互差90°时,在气隙中形成的是圆型旋转磁场。幅值不相等或者相位互差不等于90°时,在气隙中形成的是椭圆型旋转磁场。
对伺服电动机要求不仅是在控制电压作用下就能启动,且电压消失后电动机应能立即停转。如果伺服电动机控制电压消失后,像一般的单相异步电动机那样继续转动,则出现失控现象,我们把这种因失控而自行旋转的现象称为自转。
2. 感应型交流伺服电动机的控制方式
感应型交流伺服电动机的控制方式有3种,分别是幅值控制、相位控制和幅相控制。
(1)幅值控制
(2)相位控制
(3)幅相控制
观看视频:4.4.4 单相交流伺服电动机(08:50)
观看视频:4.4.1 感应型交流伺服电动机(29:04)
4.4.2交流永磁同步伺服电动机(Permanent Magnet Synchronous Motor, PMSM)
1. 交流永磁同步伺服电动机的结构
交流伺服电动机中最为普及的是同步型交流伺服电动机,其结构主要由定子,转子和检测元件(转子位置传感器和测速发电动机等)三部分组成,如图4.53所示。在定子与转子之间的气隙比异步电动机宽。使用在重力轴场合的电动机还包括制动器部分,另外较大型电动机还含有冷却风扇,辅助散热来提高电动机的使用性能。

2.交流永磁同步伺服电动机的工作原理
当交流永磁同步电动机定子三相绕组通以三相对称交流电流时,在气隙中建立一个旋转磁场,旋转磁场的转速称为同步转速,用n1表示。同步转速 ,其中P是磁极对数,f1是定子电流频率,同步转速n1的单位是r / min。当极对数为1时,此旋转磁场可以看成是由一对等效旋转磁极所产生,如图4.57所示。假设气隙磁场逆时针方向旋转,定子绕组产生的旋转磁场与转子永磁磁铁产生的磁场相互作用产生转矩,旋转磁场吸引转子的磁极随其一起旋转,转子的转速与同步转速相同,故称为同步电动机。改变定子交流电流的频率,可改变同步电动机的转速大小。磁场的旋转方向取决于定子绕组电流的相序,改变定子绕组通以交流电的相序就可以改变电动机的转向。
,其中P是磁极对数,f1是定子电流频率,同步转速n1的单位是r / min。当极对数为1时,此旋转磁场可以看成是由一对等效旋转磁极所产生,如图4.57所示。假设气隙磁场逆时针方向旋转,定子绕组产生的旋转磁场与转子永磁磁铁产生的磁场相互作用产生转矩,旋转磁场吸引转子的磁极随其一起旋转,转子的转速与同步转速相同,故称为同步电动机。改变定子交流电流的频率,可改变同步电动机的转速大小。磁场的旋转方向取决于定子绕组电流的相序,改变定子绕组通以交流电的相序就可以改变电动机的转向。

3.交流永磁同步伺服电动机的驱动控制
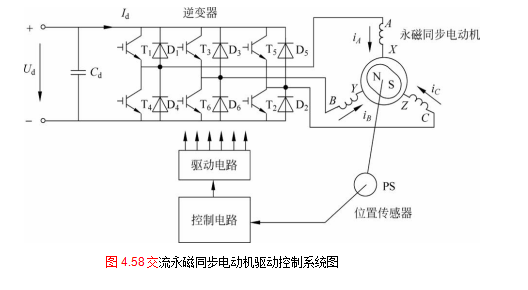
交流永磁同步电动机驱动控制系统图如图4.58所示。由三相逆变器给定子三相绕组提供三相对称交流电流在气隙中产生旋转磁场,拖动永磁转子同步旋转;定子绕组的通电频率以及旋转磁场的转速取决于转子的实际位置和转速;转子的实际位置和转速由光电式编码器或旋转变压器获得;为了实现对交流永磁同步电动机的准确控制,需要确定电动机转子的位置。除了在电动机中嵌入真正的轴编码器外,还有两个主要选择:
一是使用霍尔效应传感器,称为传感器控制,
二是检测电动机的反电动势(电动势),称为无传感器控制。
无传感器由于成本较低而成为最常见的,但两者都需要电动机转动才能感应真实位置。
观看视频:4.4.2 交流永磁同步伺服电动机(06:21)
4.4.3交流伺服电动机的特点及应用
交流伺服电动机的速度控制特性良好,在整个速度区内可实现平滑控制,几乎无振荡,效率高达90%以上,发热少,高精确度位置控制(取决于编码器精度),额定运行区域内,可实现恒力矩,惯量低,低噪音,无电刷磨损,免维护(适用于无尘、易爆环境)。
目前运动控制中一般用交流永磁同步伺服电动机,其功率范围大,惯量大,最高转速低,转速随功率增大而匀速下降,适用于低速平稳运行场合。
交流伺服电动机的缺点是控制较复杂,驱动器参数需要现场调整参数确定,而且需要更多的连线来支持其运行工作。
凡是对位置,速度和力矩的控制精度要求比较高的场合,都可以采用交流伺服电动机。
观看视频:4.4.3 交流伺服电动机的特点及应用(6:21)
观看视频:案例1 交流伺服电动机及驱动器接线(1:05)
【任务实施】 交流伺服电动机JOG(空载)模式运行
一.实训目标
熟悉交流伺服电动机的接线方法;了解JOG模式;熟悉参数设置的方法;运用信号发生器控制伺服电动机的运行。
二.实训内容
组装一台交流伺服电动机驱动控制系统,并由信号发生器控制交流伺服电动机的运行。
伺服电动机需要配合伺服驱动器共同使用,接线的关键主要在于驱动器与控制器和电
机的连接。如图4.65所示为台达伺服系统配线图。

一般情况下,伺服电动机与对应的驱动器均有生产厂商给出的标准接线,伺服电动机的
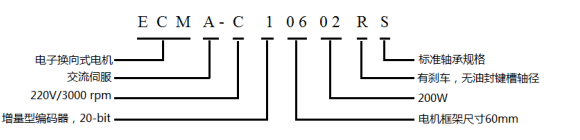
引线有两种,一种是由伺服驱动器供应的动力线,另外一种是伺服电动机内部的编码器将检测信号反馈给伺服驱动器。这两类引线在一般情况下都由厂商给出标准引线,只要认准接头。并使用其中的螺钉固定即可。本任务的电机型号是ECMA-C10602RS台达伺服电动机,其个符号意义是:
伺服驱动器与电源的连接见图4.65,主要依据电动机容量和工作载荷。通常情况下,使用接触器和断路器即可,而在大容量电动机和有刹车的情况下,采用回升电阻则能够保护电路避免产生电流过大的现象。
现代伺服电动机的控制方式有多种,其中最常用的是采用如图4.66所示的CNI端口,
即输入和输出端口,并且可以利用此端口和其他控制器(如PLC或者运动控制器)相连接。
图4.66为位置模式下的标准接线图(台达ASDAA2系列)。在CN1端,36、37、41 和43引脚定义了两路差分信号(相互反相的信号)进行脉冲输入,伺服电动机的转速取决于PULSE信号的频率,伺服电动机的旋转方向取决于SIGN信号。
较为先进的控制方式是采用网络总线形式进行连接,如图4.66中的CAN总线和485/232总线形式连接,这些应用均可以通过伺服驱动器的显示窗口进行设定使用。
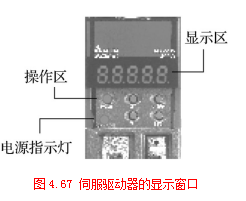
伺服驱动器的显示窗口如图4.67所示,台达伺服驱动器上方有一个显示窗口,在其下方的按钮可用于设置各种性能参数,具体可以参照台达伺服驱动器的说明书,各个生产厂家的显示窗口大同小异,只要掌握一种伺服驱动器性能参数的设置方法就可很方便地应用其他厂家的驱动器。
参照CN1接线,驱动器的R、S、T、L1C、L2C接交流电源,驱动器的U、V、W接伺服电动机。驱动器的CN2接伺服电动机的编码器的信号端。为此完成硬件上的连接。
设置伺服驱动器的性能参数需要从显示窗口入手。进行空载 JOG 点动(寸动)测试,
用 JOG方式来试转电动机及驱动器,用户可不需要接额外配线这是非常方便的。为了安全起见,JOG方式速度建议在低速度下进行。
三.需用器材 试验需用器材如表4.12所示。
表4.12 试验需用器材清单
器材 | 选型建议 |
交流伺服电动机以及驱动器 | ECMA-C10602RS台达伺服电动机 220V、3000r/min、400W,台达ASDA-A2R驱动器 |
信号发生器 | 60Hz~128KHz |
5 V、12 V、24 V开关电源 | 50 W |
万用表 | 1台,连接线路时使用 |
多股导线和电线 | 多股导线在25芯以上 |
磁力表架 | 含杠杆百分表 |
螺钉、螺母 | 若干 |
电烙铁、焊锡 | 若干 |
四、操作步骤
(1)连接交流伺服电动机。首先连接伺服驱动器和伺服电动机,使用伺服电动机本身配置的引线连接相应的接口,包括动力线和编码线,然后连接伺服驱动器的外接电源,由于没有载荷,为了方便起见,可以不使用接触器和断路器,直接将电源接至R、S、T和相应的L1、L2端口。
(2)通电测试,如果没有报警并在显示窗口中显示0000,则为正常,否则查询报警信号,如AL013,并按照厂家提供的解决问题方法逐一解决。
(3)设置性能参数。将P1-01的值设置成00,即位置模式;
(4)空载 JOG 测试,参数设置说明,如图4.68所示。
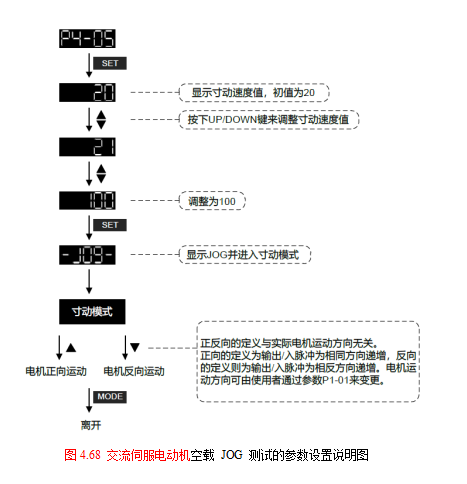
STEP 1:使用软件设定伺服启动,设定参数 P2-30 辅助机能设为 1,此设定为软件强制伺服启动(此时电动机轴就不能转动了)
STEP 2:设定参数 P4-05 为寸动速度,将欲寸动速度设定后(假设设置为50r/min),按下 SET 键后,驱动器将进入 JOG 模式。
STEP 3:按下 MODE 键时,即可脱离 JOG 模式。
(5)用外部脉冲控制电动机的转速和方向
根据图4.66中的引脚定义,连接CN1端口。将信号发生器的脉冲输出端引脚与CN1中41 和43引脚接在一起。
调节信号发生器输出脉冲的频率,观察电动机转速的变化,信号频率高,电动机转速高;信号频率低,电动机转速低。注意不要超过电动机的最高转速3000r/min。
给CN1端口的36、37引脚接一个直流电源,观察电动机的转向。接通这个直流电源相当于给驱动器一个正转信号,电动机正转,断开这个直流电源,电动机反转。
五.注意事项
(1)伺服驱动器与手摇轮焊接时需要注意它们的电压使用型号要相互匹配,否则可能烧坏伺服驱动器的输入端。
(2)伺服驱动器在通电前要检查R、S、T相是否有短路现象。
(3)电源一般为三相220V的交流电,必要时需要使用变压器。
(4)如果出现报警现象,需要记下报警信息,然后对照出错信息表进行排查和修复。
参考接线视频: 视频1 交流伺服电动机与驱动器接线视频(5:44)
(视频只用于教学,不产生其他经济效益)
简答题
1.叙述交流感应型交流伺服电动机(异步电动机)的结构和工作原理。
2.叙述交流永磁同步伺服电动(Permanent Magnet Synchronous Motor, PMSM)的结构和工作原理。
3.叙述交流伺服电动机的应用。
教师根据学生阅读记录结果及接线情况给予评价,见表4.13。
表4.13 任务评价表
实训项目 |
项目内容 | 配分 | 得分 |
熟悉交流伺服电动机的接线方法; | 10 |
|
熟悉伺服驱动器的接线方法; | 10 |
|
了解JOG模式; | 10 |
|
熟悉参数设置的方法; | 10 |
|
运用信号发生器控制伺服电动机的运行。 | 10 |
|
交流伺服电动机与驱动器的接线 | 会正确接线,通电试运行。 | 30 |
|
其他 | 安全操作规程遵守情况;纪律遵守情况; | 10 |
|
工具的整理与环境清洁 | 10 |
|
工时:1学时 | 教师签字: | 总分 |
|
理论项目 |
项目内容 | 配分 | 得分 |
叙述交流感应型交流伺服电动机(异步电动机),交流永磁同步伺服电动(Permanent Magnet Synchronous Motor, PMSM)的结构和工作原理; | 60 |
|
叙述交流伺服电动机的应用。 | 40 |
|
时间:1学时 | 教师签字: | 总分 |
|
“理论项目”参考答案
1.叙述交流感应型交流伺服电动机(异步电动机)的结构和工作原理。
结构 感应型交流伺服电动机一般是单相交流电动机,主要由定子和转子构成。定子铁心通常用硅钢片叠压而成。定子铁心槽内嵌有两个绕组,一个绕组是励磁绕组f,另一个绕组是控制绕组k,两个绕组在空间位置上互差90°电角度。
工作原理 交流伺服电动机在没有控制电压时,气隙中只有励磁绕组产生的脉动磁场,转子上没有启动转矩,转子静止不动。当有控制电压且控制绕组电流和励磁绕组电流不同相时,则在气隙中产生一个旋转磁场,转子导体切割这个旋转磁场的磁力线产生感应电动势,由于转子绕组是短路的,转子导体中便有电流流过。转子载流导体在磁场中受到电磁力f的作用,并产生电磁转矩,使转子沿着旋转磁场的方向旋转。
2.叙述交流永磁同步伺服电动(Permanent Magnet Synchronous Motor, PMSM)的结构和工作原理。
交流伺服电动机中最为普及的是同步型交流伺服电动机,其结构主要由定子,转子和检测元件(转子位置传感器和测速发电动机等)三部分组成,在定子与转子之间的气隙比异步电动机宽。使用在重力轴场合的电动机还包括制动器部分,另外较大型电动机还含有冷却风扇,辅助散热来提高电动机的使用性能。
3.叙述交流伺服电动机的应用。
凡是对位置,速度和力矩的控制精度要求比较高的场合,都可以采用交流伺服电动机


