第16课 4.3直流伺服电动机驱动控制
主要内容:
1.讲解课前的2个案例,了解直流电机是怎么产生的?认识有刷和无刷直流电机的原理
案例1有刷直流电动机的产生(7 : 18) .mp4
案例2无刷直流电动机的工作原理(4: 19) .mp4
2. 观看视频,教师在线答疑
4.3.1有刷直流伺服电动机(24:56) .mp4
4.3.2无刷直流伺服电动机(33:11) .mp4
3. 指导学生:
4.3.3直流伺服电动机的接线(4: 48) .mp44.3 [任务实施]直流伺服电动机及其驱动器接线.doc
4.完成课后作业
【任务描述】
直流伺服电动机实质是直流电动机,通过调节转子绕组的电流和电压很容易实现电动机转角、转速和转矩的控制。在机电一体化系统中,直流伺服电动机,常用作半闭环和全闭环伺服系统的伺服驱动执行元件。位置和速度检测传感器常装于电动机内部尾端同轴上。按有无电刷结构,直流伺服电动机分为有刷直流伺服电动机和无刷直流伺服电动机两类。本任务介绍有刷直流伺服电动机和无刷直流伺服电动机的工作原理、结构、特点以及驱动控制等,完成本任务,可实现以下任务目标。
【任务目标】
技能目标
会直流伺服电动机驱动控制接线。
知识目标
(1)掌握有刷直流伺服电动机的工作原理、结构、特点以及驱动控制方法;
(2)掌握无刷直流伺服电动机的工作原理、结构、特点以及驱动控制原理。
建议学时:2个学时
在开始学习本节知识之前,同学们观看以下视频,了解直流电机是怎么产生的?认识有刷和无刷直流电机的原理。
(注:本部分所有视频只用于辅助教学,不产生任何经济效益,如有侵权,请告知)
观看视频: 案例1 有刷直流电机的产生(7:18)
观看视频: 案例2 (中文)无刷直流伺服电动机原理(4:19)
观看完视频,大家都看懂了吗?如有疑问,咱们到“知识要点”部分找答案吧。
4.3.1有刷直流伺服电动机
直流伺服电动机按励磁方式分为他励式和永磁式两种。
1.直流电动机的工作原理
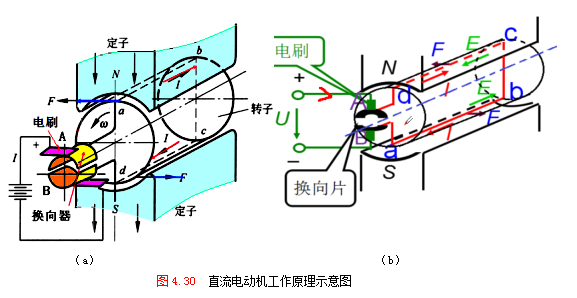
如图4.30所示是一台最简单直流电动机的模型。
此模型作为直流电动机运行时,将直流电源加于电刷A和B上,如图4.30(a)所示,将直流电源正极加于电刷A,电源负极加于电刷B,则线圈abcd中流过电流,在导体ab中,电流由a流向b,在导体cd中,电流由c流向d。载流导体ab和cd均处于N、S极之间的磁场当中,受到电磁力的作用,电磁力的方向用左手定则确定,可知这一对电磁力形成一个转矩,称为电磁转矩,转矩的方向为逆时针方向,使整个电枢逆时针方向旋转。当电枢旋转180°,导体cd转到N极下,ab转到S极下,如图4.30(b)所示,由于电流仍从电刷A流入,使cd中的电流变为由d流向c,而ab中的电流由b流向a,从电刷B流出,用左手定则判断可知,电磁转矩的方向仍是逆时针方向。
由此可见,加于直流电动机的直流电源,借助于换向器和电刷的作用,使直流电动机电枢线圈中流过的电流方向是交变的,从而使电枢产生的电磁转矩的方向恒定不变,确保直流电动机朝确定的方向连续旋转。这就是直流电动机的基本工作原理。
2.有刷直流伺服电动机的结构
由直流电动机的工作原理示意图4.30可知,直流电动机的结构由定子和转子两大部分组成。直流电动机运行时静止不动的部分称为定子,定子的主要作用是产生磁场,由机座、主磁极、换向极、端盖、轴承和电刷装置等组成。运行时转动的部分称为转子,其主要作用是产生电磁转矩和感应电动势,是直流电动机进行能量转换的枢纽,所以通常又称为电枢,由转轴、电枢铁心、电枢绕组、换向器和风扇等组成。直流电动机结构图如图4.31所示。

3.直流伺服电动机的驱动控制
一般用电压信号控制直流伺服电动机的转向与转速大小。改变电枢绕组电压的方向与大小的控制方式,称为电枢控制;改变电磁式直流伺服电动机励磁绕组电压的方向与大小的控制方式,称为磁场控制。后者性能不如前者,很少采用。 目前常用的驱动控制电路有两种方法:
(1)线性驱动方式
(2)晶体管脉宽调制(PWM)开关驱动方式
观看视频: 4.3.1 有刷直流伺服电动机(24:12)
4.3.2 无刷直流伺服电动机( brushless DC motor简称BLDCM )
无刷直流伺服电动机是指无电刷和换向器(或集电环),电动机的控制需要位置信息反馈,又称无换向器电动机。
1.无刷直流伺服电动机结构与原理
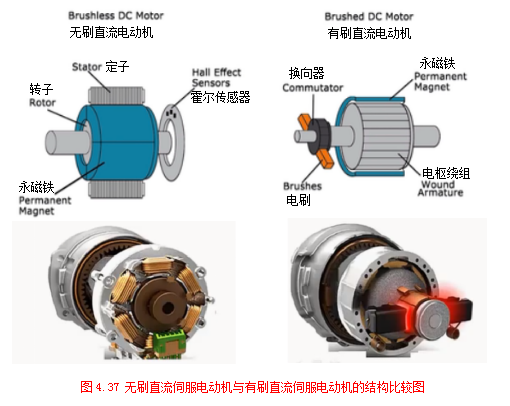
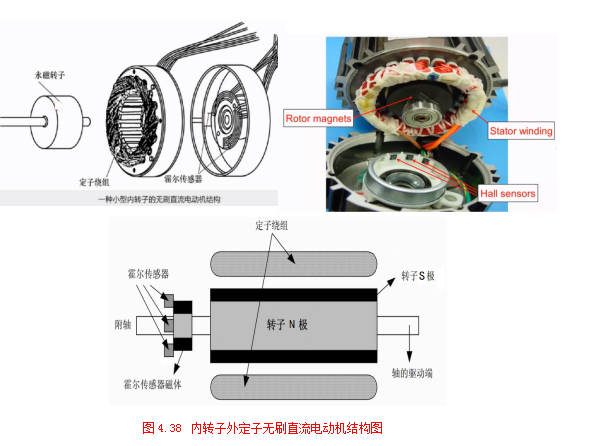
无刷直流伺服电动机为了去掉电刷,将电枢放到定子上去,而转子制成永磁体,称为永磁无刷直流电动机,这样的结构正好和普通直流电动机相反,如图4.37所示。无刷直流伺服电动机有两种结构形式,一种是内转子外定子结构形式,如图4.38所示,霍尔传感器的磁体分布与转子磁极的分布一致;另一种是外转子内定子结构形式,如图4.39所示。

2.永磁无刷直流电动机伺服系统构成及工作原理
永磁无刷直流电动机伺服控制系统图如图4.41所示。
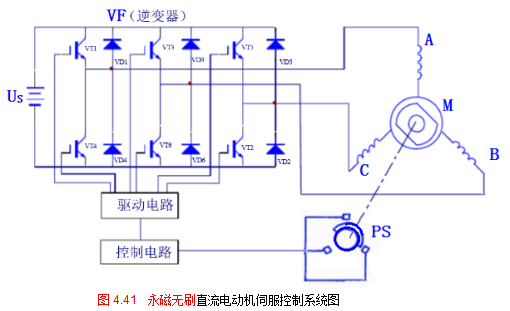
图4.41中,开关管的导通顺序共有6种导通状态,如图4.42所示,间隔60°电角度改变一次导通状态,每个状态有两相绕组导通。每改变一次状态更换一个开关管,每个开关管导通120°电角度(称逆变器为120°导通型),每相绕组导通120°。例如,当VT1、VT2导通时,电流的线路为:
电源正极 → VT1 → A相绕组 → C相绕组 → VT2 → 电源负极
其中A相绕组和C相绕组相当于串联,同时定义三相绕组星形连接点为中点,当电流从绕组的端点流向中点时,电流为正(也可说电压为正);当电流从中点流向绕组的端点时,电流为负(也可说电压为负)。这种工作形式称为二相导通星形三相六状态通电方式。
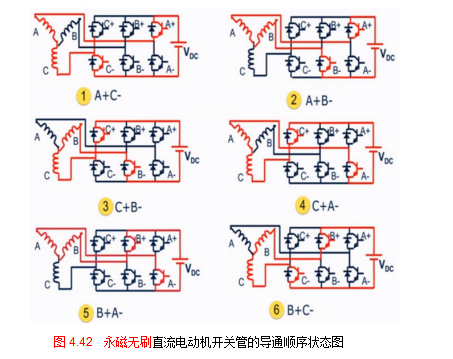
改变功率开关管的导通顺序,就可以改变电动机的转向。
3.永磁无刷直流电动机伺服驱动控制原理
控制六个IGBT (Insulated Gate Bipolar Transistor)管的通断情况就可以让电动机旋转起来。一般通过获取当前转子所处位置信号,完成换相,控制电动机旋转。
4.永磁无刷直流电动机(BLDC)调速原理
无刷直流电动机的速度正比于电压,其控制特性和机械特性均与有刷直流电动机基本相同。通常用脉冲宽度调制技术( PWM)实现无刷直流电动机的速度控制,无刷直流电动机定子绕组上施加的电压波形如图4.46所示。

观看视频: 4.3.2 无刷直流伺服电动机(33:02)
4.3.3 直流伺服电动机的特点及主要应用领域
无刷直流电动机是一种利用电子换向的小功率电动机。既具有交流电动机结构简单、运行可靠、维护方便等一系列的优点,又具有直流电动机运行效率高(96%以上)、寿命长(2万小时以上)、噪音低、调速性能好等诸多的优点。
无刷直流电动机驱动器可以控制转子维持在一定的转速,性能更加的稳定。广泛应用于现代生产设备、仪器仪表、计算机外围设备和高级家用电器中。
现代化的数控机床精度及稳定性、耐磨性使用上要求更高,只有高质量的直流伺服电动机才能满足到数控机床领域的各种生产需求。
雕刻机采用的都是高速运转的电动机来进行,使用直流伺服电动机也是最佳选择,精密度越高转速越快所雕刻的质量也能达到最好。
医疗行业内很多仪器使用需要具有低噪音的特点,直流伺服电动机就能符合高静音运转的医院设备所使用,而且运转速也能达到更高要求,满足到各种不同设备操作。
地铁屏蔽门的开门、关门指令动作,也是由直流伺服电动机来实现。
另外在各种家用电器、高铁闸机控制、轮船汽车行业等都有用到这种电动机。
【任务实施】 直流伺服电动机及其驱动器接线
阅读无刷直流电动机及其驱动器说明书,认识无刷直流电动机及其驱动器接口及功能。连接无刷直流电动机及其驱动器。
市面上常见的直流伺服电动机有两种,一种是伺服电动机与控制器在结构上是各自独立的;一种是一体化无刷电动机,伺服电动机与控制器在结构上是一体的。本任务以北京时代超群的无刷直流伺服电动机及其驱动器为例,进行无刷直流伺服电动机与驱动器的接线。
如图4.47所示是无刷直流电动机及其驱动器外形图。

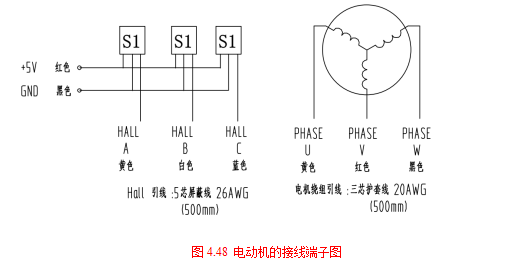
一.电动机主要技术参数如表4.8所示。电动机的接线端子如图4.48所示。
表4.8 电动机主要技术参数
电机型号 | 额定 电压 VDC | 额定 功率 W | 额定 转矩 N.M | 额定 转速 RPM | 空载 转速 RPM | 额定 电流 A | 空载 电流 A | 极对数 |
57BL95S06- -210 | 24 | 60 | 0.5 | 1000 | 2000 | 3.6 | 0.4 | 4 |
二.无刷电动机驱动器接线端子图如图4.49所示。
BLD-300B直流无刷电动机驱动器是针对中功率低压直流无刷电动机的无刷驱动的高性能产品。该直流无刷驱动器采用高性价比的解决方案设计而成。BLD-300B适用于功率为48V、440W或24V、 300W的三相直流无刷电动机的转速调节。BLD-300B直流无刷电动机驱动器端口信号说明如表4.9所示。
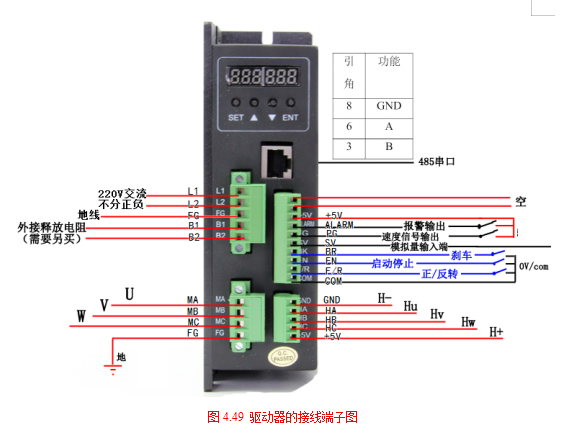
表4.9 BLD-300B直流无刷电动机驱动器端口信号
信号 | 端子 | 内容 |
电源输入 | L1 | 交流 220VAC |
L2 | 交流 220VAC |
电动机连接 | MA | 直流无刷电动机U相 |
MB | 直流无刷电动机V相 |
MC | 直流无刷电动机W相 |
霍尔信号 | GND | 直流无刷电动机霍尔信号接地线 |
HA | 直流无刷电动机霍尔信号HW |
HB | 直流无刷电动机霍尔信号HV |
HC | 直流无刷电动机霍尔信号HU |
+5V | 直流无刷电动机霍尔信号电源线 |
控制信号 | SV | 1.外接调速电位器 2.PWM调速信号输入 |
COM | 公共端口(0V参考电平) |
F/R | F/R端与COM端断开时电机顺时针运行(面对电机轴);短接时电机逆时针方向运转。 |
EN | EN端与COM端断开时电机自然停止;短接时电动机运行。 |
BRK | BRK端与COM端断开时电动机运行;短接时快速制动停止。 |
输出信号 | PG | 输出频率与电机转速成正比的固定脉宽(50uS)负脉冲串,可以计算出电机的转速。 电机每转的输出脉冲个数为3xN, N为电机的极数。例: 2对极即四极电机每转12个脉冲.当电机转速为500,转/分时端子PG的输出脉冲为6000个。 |
ALARM | 报警时该端与COM导通(低电平),同时驱动器自行停止工作处于报警状态 |
三.显示窗及键盘操作
显示窗及键盘按键位置如图4.50所示:
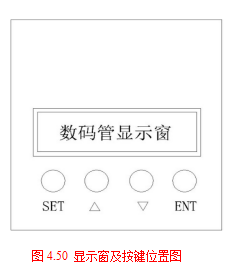
“SET”: 表示启动/停止(返回键)
“△”: 设置参数时参数数值加1
“▽”:设置参数时参数数值减1
“ENT”: “ENTER” 确认键 (调出系统参数)
1.系统参数设定方式:
(1)系统参数设定必须在电机停机状态,即面板模式时电机为停止状态或是外部端口模式时处于使能断开状态,在待机情况下,按“ENTER”键;会调出系统参数,再按 ENTER 键,会调出系统参数的设置值。
(2)按 “△”或“▽”键调到希望修改的参数。如果不想修改按“SET”键跳出设定,回到
待机状态。
(3)再按“ENTER”键会见到参数内容。如果不想修改按“SET”键跳出设定,回到待机状态。
(4)按 “△”或“▽”键调整希望修改的参数数值。
(5)按“ENTER”键存储参数,按 SET 键回到待机状态。
说明:在设置状态,如果一分钟没有按键按下会自动跳到转速显示界面。
2.保护模式:
当电机在运行过程中出现异常,数码管显示 Err×。
(1)Err1 表示电机堵转。
(2)Err2 表示过电流。
(3)Err3 表示霍尔故障。
(4)Err4 表示输入欠压。
(5)Err5 表示输入过压
五.驱动器工作模式
驱动器的工作模式有两种,可通过面板设置,其一是面板工作模式;其二是外部端口工作模式;电机按照设定方式工作,数码管显示电机运转转速。在面板工作模式下,按 SET 键启动、停止电机,长按住△、▽键增加、降低电机转速,按 ENTER 键确定电机转速。电机按设定转速运行。
接线时可参考:视频4.3.3 直流伺服电动机的接线(04:46)
任务实施接线时可参考:文件 新款ZM-7202 高压无刷驱动器
教师根据学生阅读记录结果及接线情况给予评价,见表4.10。
表4.10 任务评价表
实训项目 |
项目内容 | 配分 | 得分 |
无刷直流伺服电动机的观察 | 基本参数、接线端子 | 10 |
|
无刷直流伺服电动机驱动器的观察 | 基本参数、接线端子、功能选择设定与运行 | 10 |
|
无刷直流伺服电动机与驱动器的接线 | 会正确接线,通电调试。 | 60 |
|
其他 | 安全操作规程遵守情况;纪律遵守情况; | 10 |
|
工具的整理与环境清洁 | 10 |
|
工时:1学时 | 教师签字: | 总分 |
|
理论项目 |
项目内容 | 配分 | 得分 |
叙述有刷直流电动机的结构、工作原理; | 25 |
|
叙述无刷直流电动机的结构、工作原理; | 25 |
|
叙述有刷直流电动机的调速方法; | 25 |
|
叙述无刷直流电动机的调速方法。 | 25 |
|
时间:1学时 | 教师签字: | 总分 |
|
“理论项目”参考答案
1.叙述有刷直流电动机的结构、工作原理。
(1)结构
(2)工作原理
加于直流电动机的直流电源,借助于换向器和电刷的作用,使直流电动机电枢线圈中流过的电流方向是交变的,从而使电枢产生的电磁转矩的方向恒定不变,确保直流电动机朝确定的方向连续旋转。这就是直流电动机的基本工作原理。
2.叙述无刷直流电动机的结构、工作原理。
(1)无刷直流伺服电动机有两种结构形式,一种是内转子外定子结构形式,霍尔传感器的磁体分布与转子磁极的分布一致;另一种是外转子内定子结构形式。
(2)位置传感器,实时检测转子位置,控制电路把转子位置传感器检测到的信号进行逻辑变换后产生脉宽调制的PWM 信号,经过驱动电路放大后送到逆变器各功率开关管,控制电动机定子各相绕组通电顺序和时间,并在气隙中产生跳跃式旋转磁场,转子磁场受到气隙中旋转磁场的作用,转子将沿固定方向连续转动。
3.叙述有刷直流电动机的调速方法。
一般用电压信号控制直流伺服电动机的转向与转速大小。改变电枢绕组电压的方向与大小的控制方式,称为电枢控制;改变电磁式直流伺服电动机励磁绕组电压的方向与大小的控制方式,称为磁场控制。
4.叙述无刷直流电动机的调速方法。
无刷直流电动机的速度正比于电压,通常用脉冲宽度调制技术( PWM)实现无刷直流电动机的速度控制.


