第15-1课 任务4.1 认识机电一体化伺服系统
主要内容:
1.讲解课前的3个案例,认识机电一体化伺服系统;
案例1什么是伺服系统(0: 36) .mp4
案例2伺服控制模式及优势( 12 : 01 ) .mp4
案例3伺服电机的应用实例(1 :45 ) .mp4
2. 观看视频,教师在线答疑
4.1认识机电体化伺服驱动系统( 14 : 26 ) .mp4
3. 指导学生:
4.1 [任务实施]认识机电体化伺服驱动系统.doc
4.完成课后作业
【任务描述】
伺服系统主要用于机械设备位置和速度的动态控制,加工中心的机械加工过程就是一个典型的伺服控制过程,位移传感器不断地将刀具进给的位移传送给计算机,通过与加工位置目标比较,计算机输出继续加工或停止加工的控制信号。本任务介绍伺服驱动系统的组成、分类及执行元件与负载之间的连接方式,完成本任务,可实现以下任务目标。
【任务目标】
技能目标
能区分开环伺服系统、半闭环伺服系统、全闭环伺服系统。
知识目标
(1)理解伺服驱动系统的组成及各组成部分的作用;
(2)了解伺服系统的分类;
(3)了解执行元件与负载之间的连接方式。
建议学时:1个学时
在开始学习本节知识之前,同学们观看以下视频,认识什么是伺服系统、伺服控制模式,了解伺服系统的应用。
(注:本部分所有视频只用于辅助教学,不产生任何经济效益,如有侵权,请告知)
观看视频: 案例1 什么是伺服系统(0:36)
观看视频:案例2 伺服控制模式及优势(12:01)
观看视频:案例3 伺服电机的应用实例(1:45)
观看完视频,接下来,我们看伺服系统具体的组成、分类、接口。
一、伺服驱动系统的组成
从自动控制理论的角度分析,机电一体化伺服控制系统一般由以下环节组成,如图4.1所示。
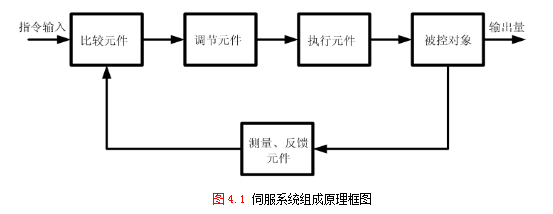
在实际的伺服控制系统中,上述的每个环节在硬件特征上并不独立,可能几个环节在一个硬件中,如测速直流电动机即是执行元件又是检测元件。
二、伺服系统分类
1)按伺服执行装置类型分类
伺服系统按伺服执行元件类型或其控制能源分,可分为电动伺服系统、液动伺服系统、气动伺服系统三类,伺服执行装置如图4.2所示。
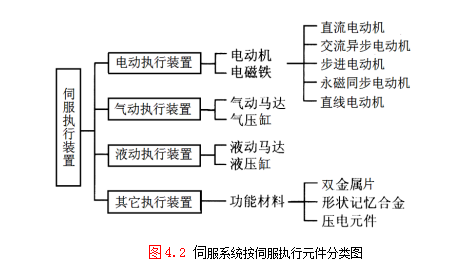
执行元件是将控制信号转换成机械运动和机械能量的转换元件。机电一体化伺服系统要求执行元件具有转动惯量小、输出动力大、便于控制、可靠性高和安装维护简便等特点。电气式、液压式和气动式执行元件是三种最常用的执行元件。
电气式、液动式和气动式执行元件的具体特点如表4.1所示。
表4.1 电气式、液压式和气动式执行元件的具体特点
种类 | 特点 | 优点 | 缺点 |
电动式 | 可用商业电源;信号与动力传送方向相同;有交流直流之分;注意使用电压和功率。 | 操作简便;编程容易;能实现定位伺服控制;响应快、易与计算机(CPU)连接;体积小、动力大、无污染。 | 瞬时输出功率大;过载差;一旦卡死,会引起烧毁事故;受外界噪音影响大。 |
液动式 | 液体压力源压力20~80×Mpa;要求操作人员技术熟练。 | 输出功率大,速度快、动作平稳,可实现定位伺服控制;易与计算机(CPU)连接。 | 设备难以小型化;液压源和液压油要求严格;易产生泄露而污染环境。 |
气动式 | 气体压力源压力5~7×Mpa;要求操作人员技术熟练。 | 气源方便、成本低;无因泄露而污染环境;速度快、操作简便。 | 功率小、体积大、难于小型化;动作不平稳、远距离传输困难;噪音大;难于伺服。 |
2)按检测反馈装置分类
伺服系统按有无检测传感器及传感器安装的位置可分为:开环伺服系统、半闭环伺服系统、全闭环伺服系统三种,如图所示
开环伺服系统如图4.9所示,未安装传感器,开环,步进电动机作为执行元件,系统简单、经济。

三、输出接口装置
执行元件与负载之间的连接方式一般有两种形式:一是直接驱动,与负载固连;二是通过不同的机械传动装置(如齿轮传动链、带传动)与负载相连,这些机械传动装置就是执行元件的输出接口装置。
观看视频:4.1 认识机电一体化伺服驱动系统(14:26)
【任务实施】 认识机电一体化伺服驱动系统
结合图1.6、图1.7、图1.8所示的机电一体化系统或其他机电一体化系统,并根据是否有反馈检测元件区分开环伺服系统、半闭环伺服系统、全闭环伺服系统。
简答题
1.叙述机电一体化伺服控制系统一般那些环节组成;并指出各环节的作用;
2.叙述伺服系统按伺服执行元件类型或其控制能源分为哪三类?并指出各自的特点。
3.叙述伺服系统按有无检测传感器及传感器安装的位置可分为哪三类?并指出各自的特点。
教师根据学生记录结果给予评价,见表4.2。
表4.2 任务评价表
实训项目 |
项目内容 | 配分 | 得分 |
认识机电一体化伺服驱动系统 | 基本情况的记录 | 100 |
|
工时:1学时 | 教师签字: | 总分 |
|
理论项目 |
项目内容 | 配分 | 得分 |
叙述机电一体化伺服控制系统一般那些环节组成;并指出各环节的作用; | 20 |
|
叙述伺服系统按伺服执行元件类型或其控制能源分为哪三类?并指出各自的特点。 | 40 |
|
叙述伺服系统按有无检测传感器及传感器安装的位置可分为哪三类?并指出各自的特点。 | 40 |
|
时间:1学时 | 教师签字: | 总分 |
|
“理论项目”参考答案
1. 从自动控制理论的角度来分析,机电一体化的伺服控制系统一般由以下环节组成,如图4.1所示。
(1)比较环节 是将输入的指令信号与系统的反馈信号进行比较,以获得输出与输入间的偏差信号的环节,通常由专门的电路或计算机来实现。
(2)控制器 通常是计算机或PID控制电路,主要任务是对比较元件输出的偏差信号进行变换处理,以控制执行元件按要求动作。
(3)执行元件 作用是按控制信号的要求,将输入的各种形式的能量转化成机械能,驱动被控对象工作。机电一体化系统中的执行元件一般指各种电动机或液压、气动伺服机构等。
(4)被控对象 是指被控制的机构或装置,是直接完成系统目的的主体。一般包括传动系统、执行装置和负载。
(5)检测环节 是指能够对输出进行测量,并转换成比较环节所需要的量纲的装置。一般包括传感器和转换电路。无论采用何种控制方案,系统的控制精度总是低于检测装置的精度。
2.伺服系统按伺服执行元件类型或其控制能源分,可分为电动伺服系统、液动伺服系统、气动伺服系统三类。
表4.1 电气式、液压式和气动式执行元件的具体特点
种类 | 特点 | 优点 | 缺点 |
电动式 | 可用商业电源;信号与动力传送方向相同;有交流直流之分;注意使用电压和功率。 | 操作简便;编程容易;能实现定位伺服控制;响应快、易与计算机(CPU)连接;体积小、动力大、无污染。 | 瞬时输出功率大;过载差;一旦卡死,会引起烧毁事故;受外界噪音影响大。 |
液动式 | 液体压力源压力20~80×Mpa;要求操作人员技术熟练。 | 输出功率大,速度快、动作平稳,可实现定位伺服控制;易与计算机(CPU)连接。 | 设备难以小型化;液压源和液压油要求严格;易产生泄露而污染环境。 |
气动式 | 气体压力源压力5~7×Mpa;要求操作人员技术熟练。 | 气源方便、成本低;无因泄露而污染环境;速度快、操作简便。 | 功率小、体积大、难于小型化;动作不平稳、远距离传输困难;噪音大;难于伺服。 |
3.伺服系统按有无检测传感器及传感器安装的位置可分为:开环伺服系统、半闭环伺服系统、全闭环伺服系统三种:
开环伺服系统,未安装传感器,开环,步进电动机作为执行元件,系统简单、经济。
半闭环伺服系统,在电动机同轴上安装传感器,间接反映执行机构运动状态,半闭环,使用交、直流伺服电动机,精度比开环高,系统稳定。
全闭环伺服系统,在执行机构上安装传感器,直接反映执行机构运动状态,全闭环,使用交、直流伺服电动机,精度最高。


