
-
1 实施内容
-
2 项目评价
典型机电一体化系统机械技术的应用
一、项目内容
以MPS YL-335B的输送单元)为例,识别其机械组件并了解其功用,对机械部件进行规范拆装与调试。
二、实施内容与步骤
1. 了解输送单元功能及其组件
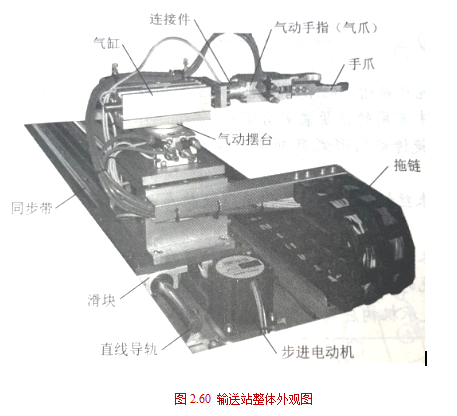
MPS是一种典型的机电一体化系统。在YL-335B中,输送单元尤为重要,是承担任务最为繁重的工作单元。该单元的基本功能是通过导轨上的直线运动传动机构,驱动机械手装置精确到达指定物料台上,抓取工件,然后将其输送到指定地点放下,实现传送工件的功能。同时,该单元在PPI网络系统中担任着主站的角色,它接收来自按钮/指示灯模块的系统主令信号,读取网络上各从站的状态信息,并加以综合后,向各从站发送控制要求,协调整个系统的工作。输送站整体外观如图2.60所示。
2 . 识别输送单元的机械传动系统及其组成
输送单元的机械结构由传动机构、执行机构和导向及支撑机构三部分组成。
(1)传动机构。传动机构是指把动力机产生的机械能传送到执行机构的中间装置,输送站的传动机构主要由伺服电动机和抓取机械手两部分组成。
伺服电动机由伺服电动机放大器驱动,通过同步轮和同步带带动滑动溜板沿直线导轨做往复直线运动,从而带动固定在滑动溜板上的抓取机械手装置做往复直线运动。
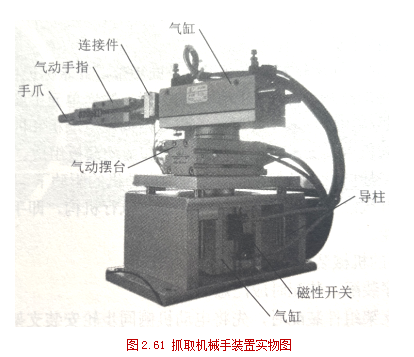
抓取机械手装置是一个能实现四自由度运动(即升降、伸缩、气动手指夹紧/松开和沿垂直轴旋转的四维运动)的工作单元,该装置整体安装在步进电动机传动组件的滑动溜板上,在传动组件带动下整体做直线往复运动,定位到其他各工作站的物料台,然后完成抓取和放下工件的操作。图2.61是抓取机械手装置实物图。
(2)执行机构。执行机构是用来完成操作任务的直接装置。其根据操作指令的要求在动力源的带动下完成预定的操作。输送站的执行机构采用气动手爪,实现工件的抓取与放下功能。
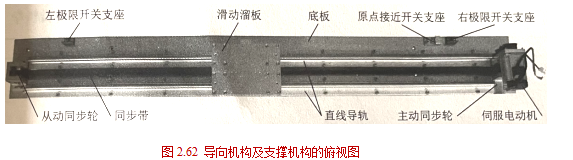
(3)导向机构及支撑机构。导向及支撑机构的作用是支撑和限制运动部件按给定的运动要求和规定的运动方向运动。输送单元采用圆柱形导轨作为导向机构及支撑机构,带动滑动溜板做直线运动,为安装在滑动溜板上的执行机构实现精确定位奠定基础。图2.62是导向机构及支撑机构的俯视图,它由直线导轨、底板、滑动溜板、同步带和原点接近开关支座,以及左、右极限开关支座等组成。
3. 输送单元的机械拆卸
(1)准备工作
①准备扳手、螺钉旋具、木槌等拆装工具,劳保手套、绝缘鞋、安全帽等安全保护装备,百分表、钢尺等检测装置。
②戴安全帽,穿绝缘鞋,戴劳保手套。
③切断电源开关,关闭气源装置。
(2)抓取机械手装置拆卸
①依次拆卸气管,并做标记按顺序摆放。
②依次拆卸传感器,并做标记按顺序摆放。
③依次拆卸气动手指、气动摆台、导柱、提升机构,并做标记按顺序摆放。
(3)导向机构及支撑机构拆卸①拆卸大溜板及四个滑块组件。
②依次拆卸传送带、同步轮安装支架组件及同步带,并做标记按顺序摆放。
(4)观察主要零件的结构,分析机械机构的作用。输送单元主要由传动机构、执行机构和导向机构及支撑机构组成,其中传动机构主要由伺服电动机和四自由度机械手组成,执行机构是手爪,导向机构及支撑机构主要由导轨和滑动溜板组成。
机械手整体安装在导向及支撑机构上,在伺服电动机的驱动下,定位到其他各工作站,再利用伸缩气缸、提升气缸和回转气缸将运动传递给执行机构,即手爪,以实现手爪在规定位置抓取工件的功能。
(四)完成输送站的机械装调
按拆卸的相反顺序装配,装配时应注意:
(1)同步轮安装支架组件装配时,先将电动机侧同步轮安装支架组件用螺栓固定在导轨安装底板上,再将调整端同步轮安装支架组件与底板连接。
(2)传送带的两端应在大溜板的反面进行固定。
(3)装配大溜板及四个滑块组件时,在拧紧固定螺栓的同时,应一边推动大溜板左右运动,一边拧紧螺栓,直到滑动顺畅为止,并且可以通过锁紧螺栓,调整传送带的张紧度。
(4)先将气动摆台固定在组装好的提升机构上,然后在气动摆台上固定导杆气缸安装板。安装时要先找好导杆气缸安装板与气动摆台连接的原始位置,以便有足够的回转角度。
(5)整理工作台、工具。
注:项目实施所用的设备可根据实验室条件,选取可替代的其他机电一体化设备,实训学时可根据实际情况随时调整。

