任务内容:I/O的应用
【实践内容】 :
(1)掌握I/O板的基本结构和接线形式,掌握电磁阀线圈与机器人I/O板的连接方式,测试I/O输出信号的点位。
(2)掌握输出控制指令SetOutp、等待delay指令的用法。
(3)完成规定轨迹和位置物料搬运的编程操作。
(4)结合前面所学的内容,根据现有设备,设计一个搬运码垛的工作流程并实操。
【注意事项】:
(1)安全第一,预防为主为原则
(2)手动示教时,外部速度勿超10%。
(3)当示教机器人时,机器人活动区域内切勿站人。
任务目标:I/O的应用
【知识技能目标】:
1. 熟悉工业机器人I/O板,了解其功能和基本应用方法。
2. 物料搬运的相关指令,能够编写程序实现机器人物料搬运的功能。
3. 掌握工业机器人工作流程设计与编程一般方法,并能够拓展应用。
【素养目标】:
1. 培养安全操作意识和良好的职业素养。
2. 培养科学严谨的工作态度,精益求精的工作作风。提升学生指令运用能力和逻辑思维能力。
3. 培养查找文献和各类资源、获取信息并利用信息的能力,获取信息和评估、分析并能合理利用和支配运用于课程学习。
4. 培养良好的团队协作能力,正确处理人际关系的能力。虚心求教,班集体成员共同进步。
FOXBOT工业机器人I/O板
一、I/O板的定义
I/O是input/output的缩写。即输入输出端口。每个设备都会有一个专用的I/O地址﹐用来处理自己的输入输出信息。其中输出及输入埠各分为4组(Port A-D),每组有16个输出输入点(Bit 0-15),共有64点输出点(output)和64点输入点(input)。
二、I/O板的作用
工业机器人I/O板,作为机器人系统中的一个关键组件,其作用不可忽视。以下是对其作用的详细阐述:
1. 实现信号传输与交互
工业机器人I/O板主要负责机器人与外部设备(如传感器、执行器等)之间的信号传输与交互。这些信号包括输入信号(如来自传感器、按钮等的信号)和输出信号(如控制执行器动作的指令)。通过I/O板,机器人能够实时感知外部环境的变化,并根据这些变化做出相应的反应,从而实现与外部设备的协同工作。
2. 扩展机器人功能
I/O板为工业机器人提供了丰富的接口资源,使得机器人能够连接更多的外部设备。这些外部设备可以执行各种复杂的任务,如夹取、搬运、焊接等。通过扩展机器人的功能,I/O板使得机器人能够适应更多的应用场景,提高生产效率和自动化水平。
3. 实现精确控制
工业机器人I/O板支持多种类型的信号输入和输出,包括数字量输入/输出(DI/DO)和模拟量输入/输出(AI/AO)。这些不同类型的信号能够满足机器人对精确控制的需求。例如,在焊接作业中,机器人需要通过AI/AO接口接收焊接电流和电压的模拟量信号,并根据这些信号调整焊接参数,以实现高质量的焊接效果。
4. 保障系统稳定运行
I/O板还具备过载保护、短路保护等安全功能,能够在机器人运行过程中及时检测并处理异常情况,防止系统损坏或事故发生。这些保护功能对于保障工业机器人系统的稳定运行具有重要意义。
5. 支持灵活配置
工业机器人I/O板支持灵活的配置方式,用户可以根据实际需求选择合适的I/O模块和接口类型。同时,用户还可以通过编程软件对I/O板进行编程和调试,以实现对机器人行为的精确控制。这种灵活性使得I/O板能够适用于不同品牌和型号的工业机器人,为用户提供更多的选择和便利。
工业机器人I/O板在机器人系统中发挥着至关重要的作用。它不仅实现了机器人与外部设备之间的信号传输与交互,还扩展了机器人的功能、实现了精确控制、保障了系统的稳定运行,并支持灵活的配置方式。随着工业自动化技术的不断发展,工业机器人I/O板的功能和性能将不断提升,为工业自动化领域带来更多的创新和突破。
三、FOXBOT工业机器人I/O板的接线
I/O板外形见图6-1-1。I/O信号连接板实物见图6-1-2。I/O输入、输出接线示意图见图6-1-3。
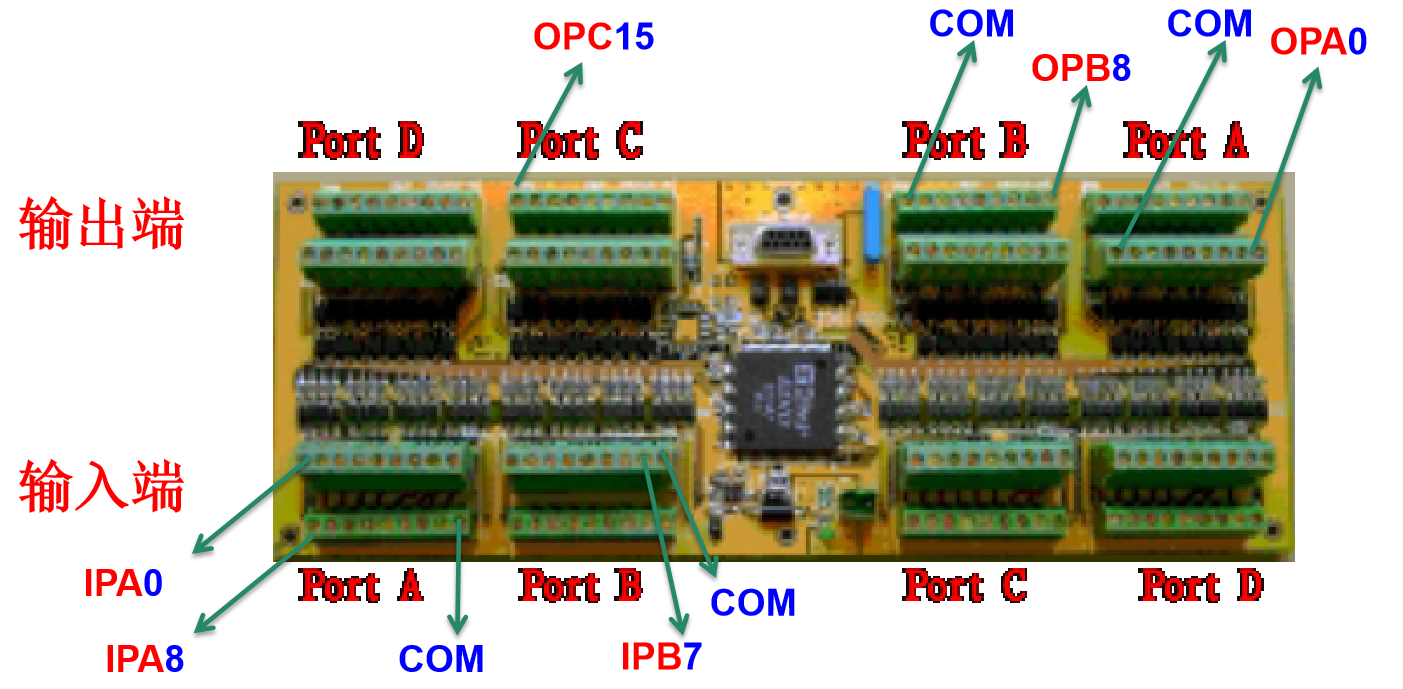
图6-1-1 I/O板硬件
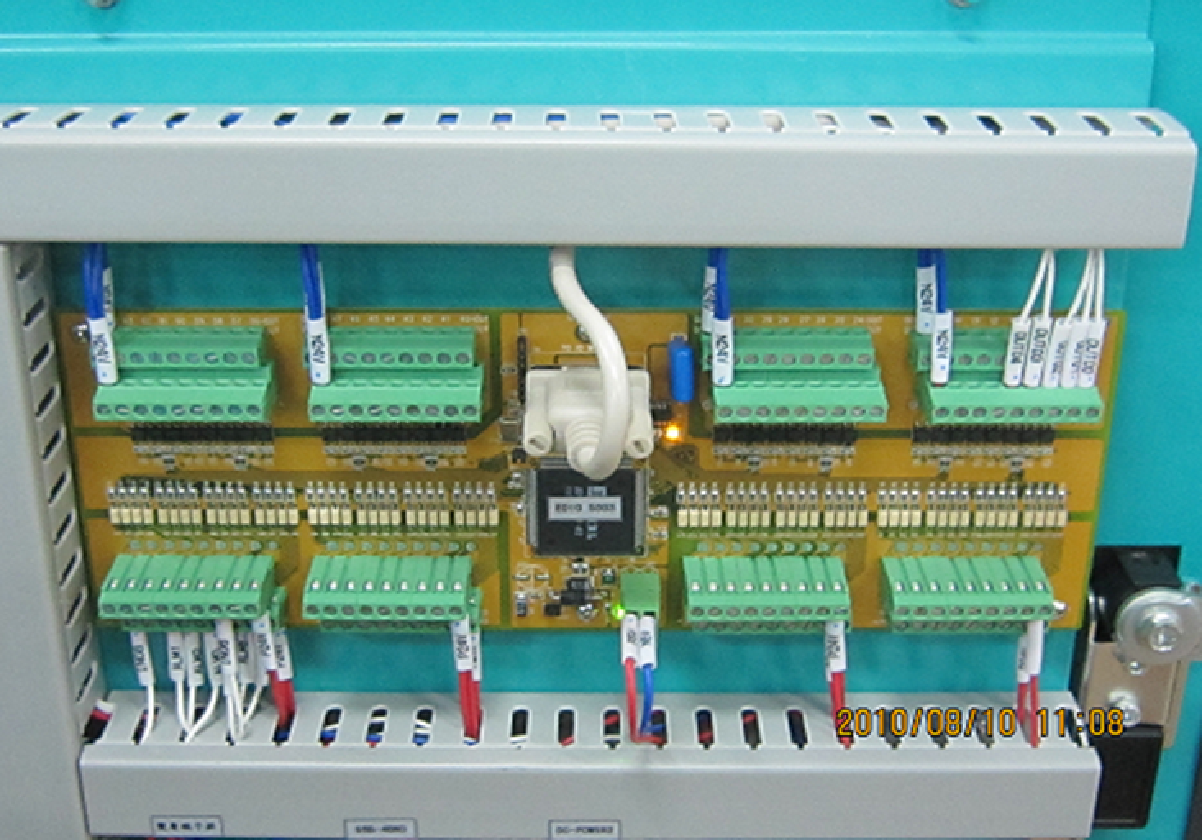
图6-1-2 I/O信号连接板实物图
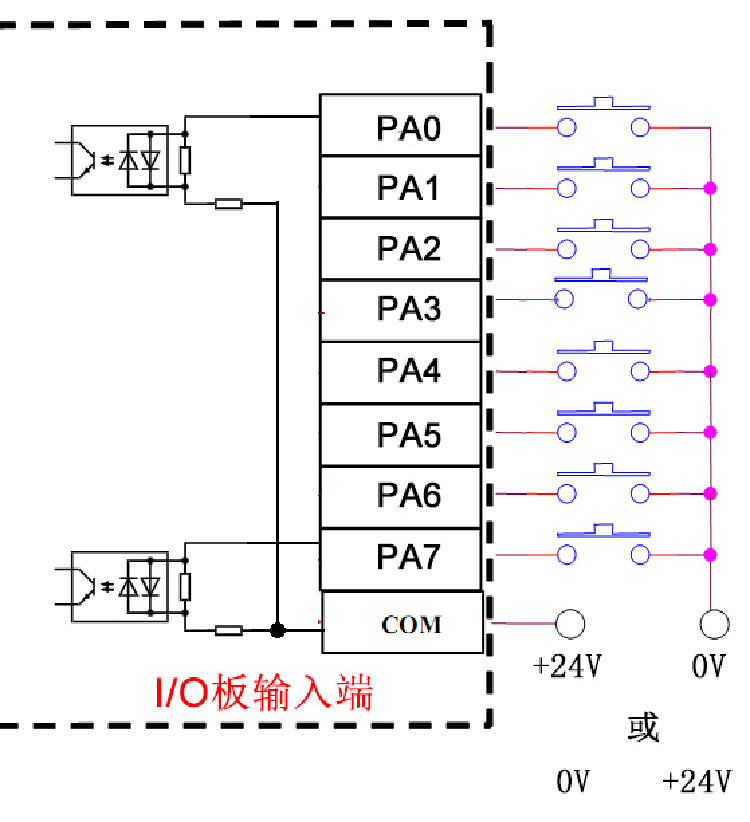
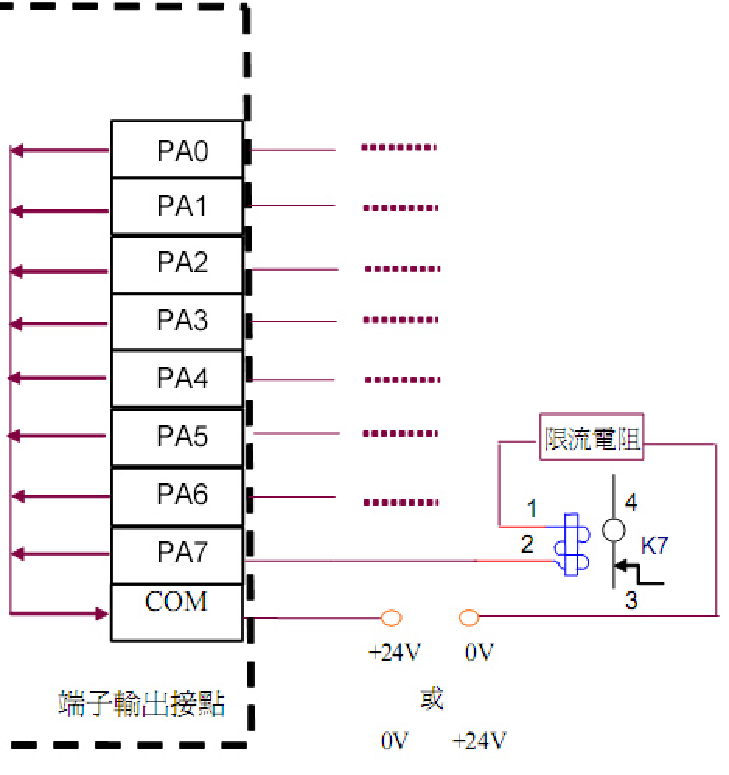
图6-1-3 I/O输入、输出接线示意图
四、FOXBOT工业机器人相关I/O位置定义
表6-1-1 相关I/O位置定义
地址 | 输入埠(Inport) | 输出埠(Outport) |
PA0 | 开始/终止运行 | 第二轴剎车 |
PA1 | 终止运行 | 第三轴剎车 |
PA2 | 暂停运行(系统闭锁) | 第五轴剎车 |
PA3 | 继续运行 | 伺服开启 |
PA4 | [系统保留] | 伺服报警复位(Reset) |
PA5 | 绝对式编码器电力检测 | 第四轴剎车 |
PA6 | 急停按钮(EMG) | 第六轴剎车 |
PA7 | 伺服状态报警 [V4.1.3] | 第一轴剎车 [V4.1.3] |
PA8 | 使能开关(Deadman SW) | [系统保留] |
PA9 | 关闭程序 | [系统保留] |
PA10 | 第一轴伺服报警 | 机器人动作中* [V4.1.3] |
PA11 | 第二轴伺服报警 | 位于干涉区域内* |
| PA13 | 第四轴伺服报警 | 自动运行* |
| PA14 | 第五轴伺服报警 | 暂停运行* |
| PA15 | 第六轴伺服报警 | 系统报警* |
| PB0-15 | 使用者保留] | 使用者保留] |
| PC0-15 | 使用者保留] | 使用者保留] |
| PD0-15 | 使用者保留] | 使用者保留] |