课后拓学
-
1 奇异点的介绍
-
2 检索问答
-
3 课后讨论
上一节
下一节
【拓展研学】: 奇异点
出现奇异点现象为六轴多关节Robot的物理特性
六轴机器人在运动过程中若五轴角度为0度(J5=0),第四轴与第六轴共线(J4//J6),在作逆向运动学计算时,第四轴和第六轴两轴的角度会产生无限多组解。这种位置在机器人学上称之为奇异点(见图4-4-1)。
实际操作中,当使用直角坐标走 (直线)运动时最容易行经奇异点,若第五轴接近0°时,第四轴急转,此现象可能会造成危险,应尽量避免使用直角坐标系过任何的奇异点﹐用轴坐标调试的点位或其它方法解决。此外,四轴机器人的奇异点发生于第一轴及第二轴均为0°时(J1=J2=0°)。
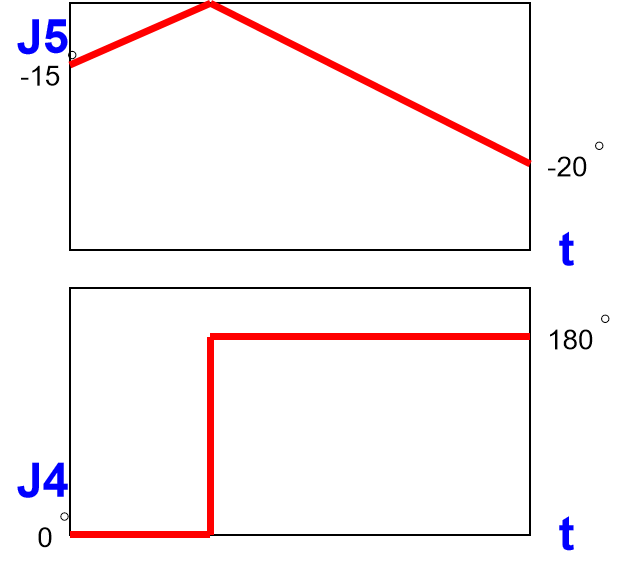
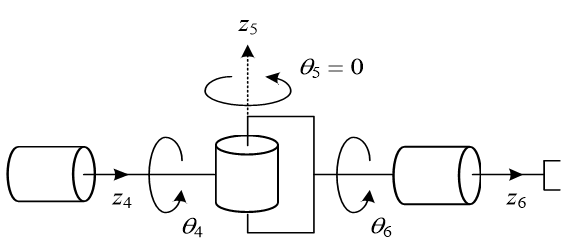
图4-4-1 奇异点位置示意图

