课后拓学
-
1 FOXBOT其他创建工...
-
2 FOXBOT工具坐标系...
-
3 课后再练
上一节
下一节
【拓展研学】: FOXBOT工业机器人其他创建工作坐标系的方法
一、原点偏移法(Origin Offset)
在某些应用场合下,有些关联点必须同时集体平移一个固定距离,但并不需要在姿态上作改变。此法可定义一个坐标系,将欲集体平移的所有点位关联在一起。而其坐标原点就是其中的一个点P(N) 。当P(N) 产生平移时,可用此法再次定义坐标系原点欲平移后的点位P(N),无需针对所有点重新示教,就可以达成点位集体平移。
选择关联集合点其中一个点P作为新坐标原点,并将机器人移动到此点。图3-4-为原点偏移法创建工作坐标系示意图。
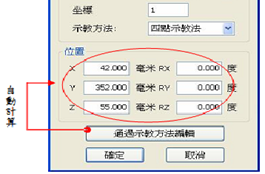
1. 点选【坐标系定义】 ,项目选单中点选【 Work坐标系】 。
2. 在【添加一个新坐标系... 】对话框中,点选【示教方法】为【原点偏移法】。
3. 然后按下【通过示教方法】编辑,会出现新增出坐标系WorkN。
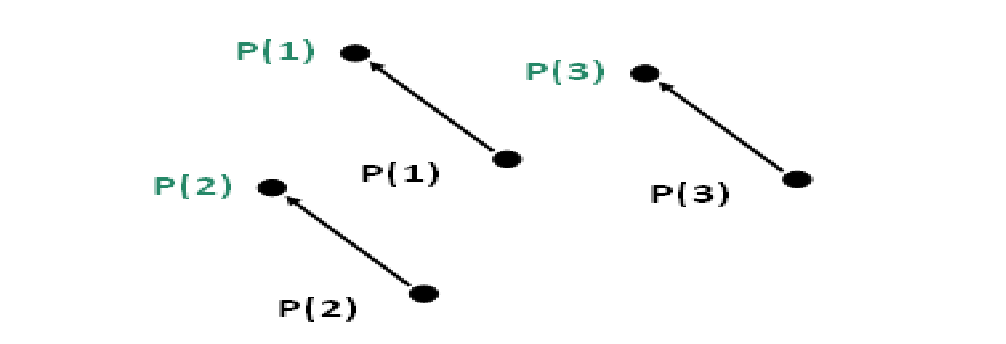
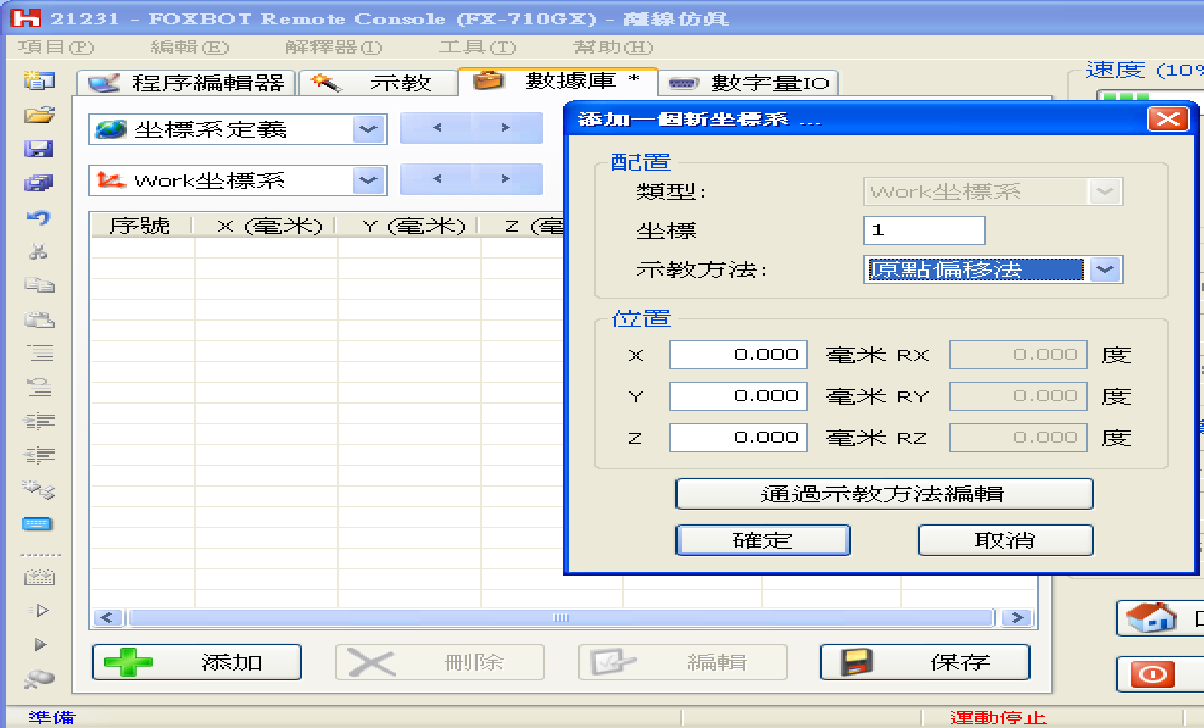
图3-4- 原点偏移法创建工作坐标系示意图
4. 将所有欲关联此坐标系的点位的【 Work】栏位点选为WorkN.
5. 后续当P点平移时,只要以步骤3重新对原点P定义坐标系WorkN即可。