-
1 章节内容
-
2 PPT
-
3 视频
主要内容:
时间控制线路的分析和设计;时间继电器的应用。
重点难点:
时间控制线路的分析和设计。
内容精要:
在生产过程中,有时还需要按时间要求对电动机进行控制,即按照所需的时间间隔来接通、断开或换接被控制的电路,以协调和控制生产机械的各种动作,这就是时间控制。例如三相笼式异步电动机的星形—三角形降压起动,起动时定子三相绕组联结成星形,经过一段时间,待转速上升到接近正常转速时换接成三角形,像这一类的时间控制可以利用时间继电器来实现。
例1:控制要求:M1先起动,经过一定延时后,M2能自行起动。
1.控制线路
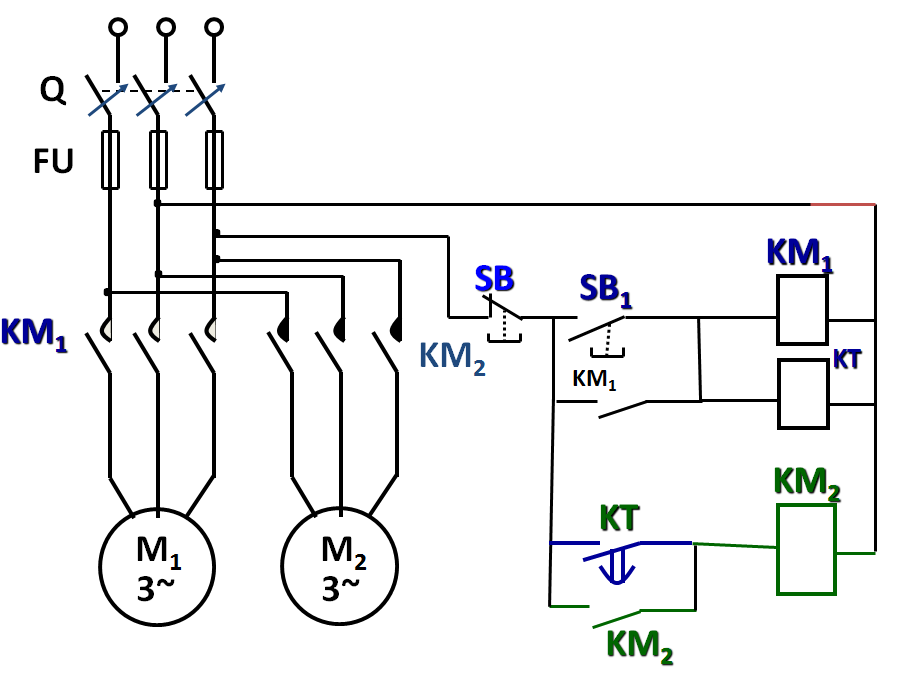
2.控制过程
接通电源开关,电动机准备起动。按下起动按钮 SB1,接触器KM1线圈通电,电动机M1先起动,而电动机M2主触点对应的接触器线圈不能得电,因此不能起动。与此同时,时间继电器KT 的线圈也通电,经过预定时间,时间继电器动作:其延时闭合的动合触点闭合,使KM2的线圈得电,于是,电动机M2自行起动。按下停车按钮SB,两台电动机同时停车。
例2:三相笼式异步电动机的星形—三角形降压起动
1、控制线路
下图是按时间要求控制的笼型电动机Y-△起动控制线路。在其主电路中,接触器KMY用于定子绕组的Y形联结,KM2用于定子绕组△形联结。在其控制电路中,时间间继电器 KT 的延时断开的动断触点串联在 KM3的线圈电路中,延时闭合的动合触点串联在 KM2的线圈电路中。
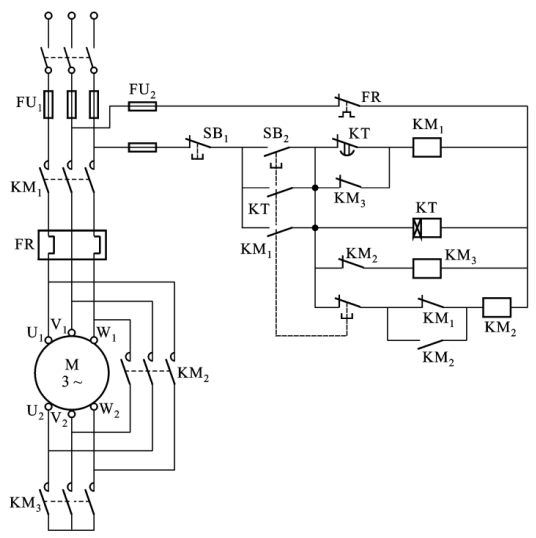
2.控制过程
接通电源开关,电动机准备起动。按下起动按钮 SB1,接触器KM1和 KM3的线圈通电,电动机按Y 形联结起动(与 SB1并联的KM1的辅助触头用于自锁)。与此同时,时间继电器KT 的线圈也通电,经过预定时间(电动机起动所需要的时间) ,时间继电器动作:其延时断开的动断触点断开,使KM3的线圈断电;而其延时闭合的常开触点也闭合,使KM2线圈得电。于是,电动机定子绕组由 Y 形联结转换成 D形接法,投人正常运行。此时时间继电器已完成任务,线圈断电(因为KM2的辅助常闭触点已经断开),脱离电源。时间继电器KT 线圈断电后,其常开触点断开,KM2线圈的通路由 KM2的辅助常开触点自锁。
时间继电器还可用于耗能制动等控制电路中。

