
-
1 基本知识
-
2 课件
-
3 单元测验
点的平面位置的测设
任何工程中建筑物的位置、形状和大小,都是通过其特征点在实地上表示出来的。例如,圆形建筑物的中心点、矩形建筑物的四个角点、线形建筑物的端点和转折点等。因此,放样建筑物归根结底是放样点位。常用的设计平面点位放样方法有直角坐标法、极坐标法、自由设站法、方向线交会法、距离交会法、前方交会法、轴线交会法、GPSRTK法等。
设地面上至少有两个施工测量控制点,如A、B…,其坐标已知,实地上也有标志,待定点P的设计坐标也为已知。点位放样的任务是在实地上将点P标定出来。
5.3.1 直角坐标法
直角坐标法是根据已知纵横坐标之差,测设地面点的平面位置。当建筑场地的施工控制网为方格网或建筑基线形式,且量距方便的地方,宜采用直角坐标法。这时,待放样的点P与控制点之间的坐标差就是放样元素,如图5-3-1所示。用直角坐标法放样的操作步骤如下:
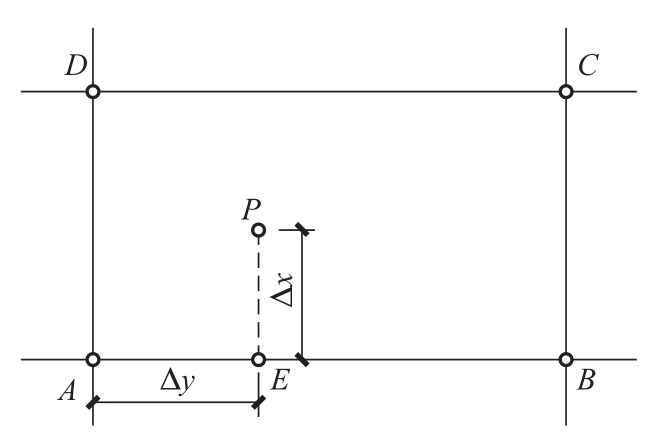
图5-3-1 直角坐标法
(1)在A点架设全站仪,后视点B定线并放样水平距离Δy=yP-yA得垂足点E;
(2)在点E架设全站仪,采用水平角放样方法,拨角90°得方向EP,并在此方向上放样水平距离Δx=xP-xA,即得待定点P。
放样时注意比较Δx和Δy的大小,先放数值大的方向。
5.3.2 极坐标法
极坐标法是根据已知水平角和水平距离测设地面点的平面位置。极坐标法使用灵活,只要通视条件下都可用,因此其是目前施工现场最常用的一种方法。如图5-3-2所示,已知的控制点A(XA,YA)和B(XB,YB),设放样点P的设计坐标为(XP,YP),用极坐标法放样具体操作步骤如下:
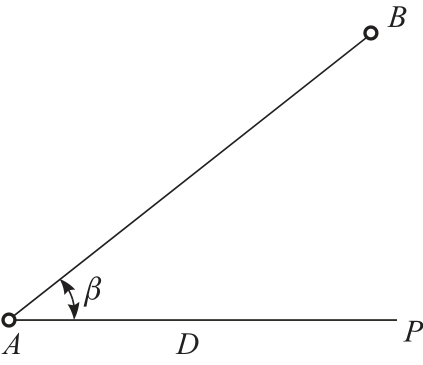
图5-3-2 极坐标法
(1)根据A、B、P点的坐标,利用坐标反算原理计算放样数据β和D:

(2)将全站仪安置于A点,后视B点,顺时针方向拨角β定出AP方向,然后沿AP方向量距离D即得P点。
也可用全站仪坐标放样功能直接进行坐标放样。
5.3.3 自由设站法
自由设站法实际上是一种边角后方交会,如图5-3-3所示。当测区控制点和放样点之间不通视时,可根据测区的现场条件选择最有利于工作开展的P点架设仪器,利用全站仪测距、测角的功能,通过对两个已知点A和B的观测,得到观测数据D1、D2和β,按最小二乘法求测站点P的坐标,再根据测站点、已知点和放样点的坐标,采用极坐标法放样各点,该法称为自由设站法。自由设站法加极坐标法是实现施工放样测量一体化的主要方法,达到“一站到位”的工作效果,大大提高了设站的灵活性和便捷性。
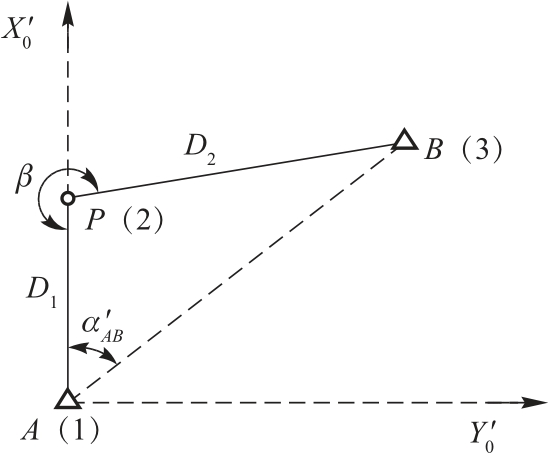
图5-3-3 自由设站法
5.3.4 方向线交会法
方向线交会法是利用两条互相垂直的方向线相交来定出放样点位的方法。当进行施工控制网为矩形网(矩形网的边与坐标轴平行或垂直)的大型厂矿、厂房立柱定位和基础中心定位时,宜采用方向线交会法。方向线的设立可以用全站仪,也可以是细线绳。
图5-3-4所示为矩形控制网,N1、N2、N3和N4是矩形控制网角点,设以N2、N4为测站点,放样点为P,则先用矩形控制网角点N2和N4的坐标和放样点P的坐标计算放样元素Δx和Δy,自点N2沿矩形边N2N1和N2N3分别量取ΔxN2P=xP-xN2和ΔyN2P=yPyN2得点1和点3,自点N4沿矩形边N4N3和N4N1分别量取ΔxN4P=xN4-xP和ΔyN4P=yN4-yP得点2和点4。于是,就可以在点1和点3安置全站仪,分别照准点2和点4,得方向线1—2和3—4,两方向线的交点即放样点P。
若P点要进行基础开挖,其交会点位不能实地直接标出,则可以在基坑开挖范围之外,分别在1—2和3—4方向线上设置定位小木桩ɑ、b和c、d,这样便可随时用ɑ、b和c、d拉线,交会出P点位置。为了消除仪器误差,在测设方向线1—2和3—4时,应用正倒镜分中法定线,提高定线精度。
如图5-3-5所示,根据厂房矩形控制网上相对应的柱中心线端点,以全站仪定向,用方向线交会法测设柱基中心或柱基定位桩。施工过程中,各柱基中心线则可以随时将相应的定位桩拉上线绳,恢复其位置。
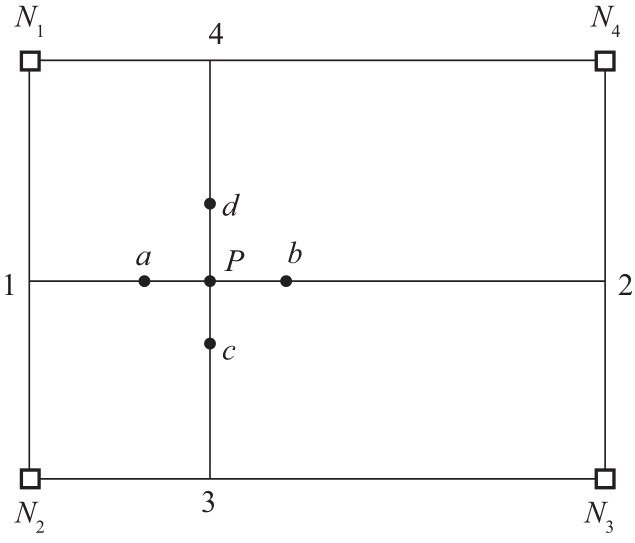
图5-3-4 方向线交会法单点放样
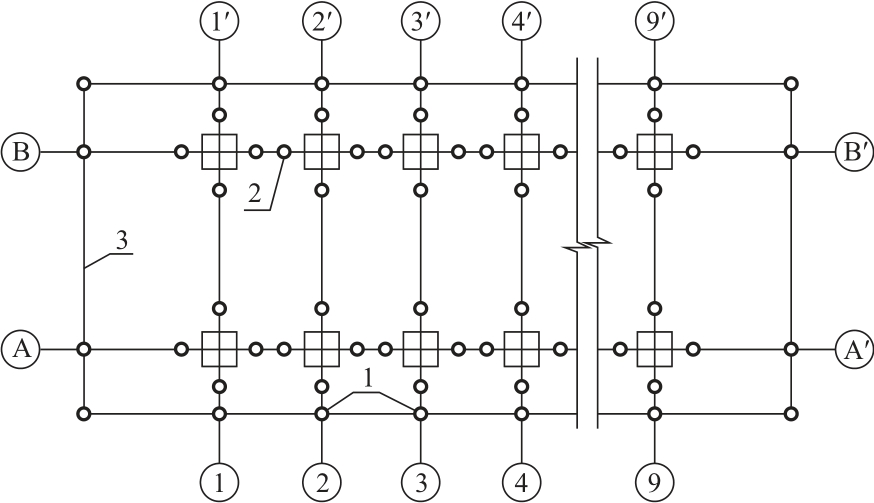
图5-3-5 方向线交会法柱基中心定位
5.3.5 距离交会法
距离交会法是利用放样点到两已知点的距离交会定点。放样时分别以两已知点为圆心,以相应的距离为半径用尺子在实地画弧,两弧线的交点即放样点位置。此法要求放样点与已知点的距离不超过一整尺长,且地面平整、便于量距。
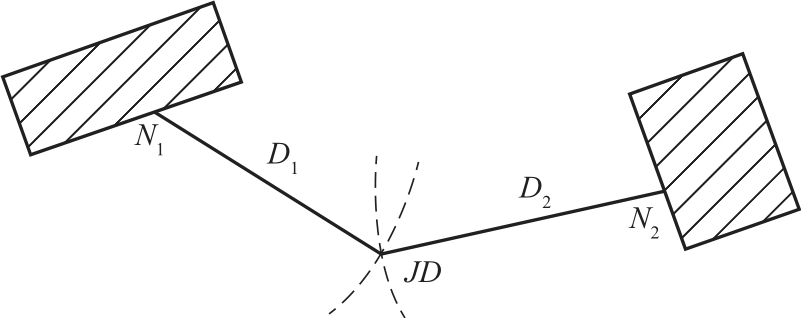
图5-3-6 距离交会法
在公路勘测阶段,需要对路线交点进行固定,并在交点附近的建筑物或树木等物体上做标记,量出标记至交点的距离并记录。施工时,可借助建筑物或树木上所做的标记用距离交会法寻找交点的位置。如图5-3-6所示,N1、N2是勘测阶段在房屋上做的标记,JD是路线交点,利用已知距离D1、D2交会可快速找到JD桩位。

距离交会
5.3.6 前方交会法
前方交会法又称角度交会法,是根据坐标反算求出放样边与定向边之间的夹角β,以β为放样数据来放样点位的方法。当工程设计复杂,放样点离控制点较远,点位放样精度要求较高,不便或不能量距时,前方交会法比较方便。
1.两方向前方交会法放样点位
如图5-3-7所示,已知控制点A、B坐标及点位,放样点P的坐标值已知,利用控制点A、B放样设计点P的具体步骤如下:
(1)计算放样数据α、β。根据A、B、P点的坐标,分别计算AB、AP、BP的方位角,并按下式计算交会角:

(2)放样方法。放样时最好采用两台全站仪分别在A、B点设站,A点安置的全站仪后视B点,逆时针方向拨角α,在P点两侧钉骑马桩1和1′,在木桩顶用正倒镜分中法得方向线1—1′;B点安置的全站仪后视A点,顺时针方向拨角β,同样方法得方向线2—2′,两方向线的交点即P点的正确位置。
P点的定位精度主要取决于α、β的拨角精度,除此之外,还与交会角∠APB的大小有关。当交会角在90°左右时,交会精度最高。交会角一般不宜小于60°或大于150°。
2.三方向前方交会法放样点位
有时为了加强检核或提高放样精度,还需要在第三个控制点上放样第三条方向线来交会P点,如图5-3-8所示。当桥墩台中心放样时,第三方向最好选用桥轴线方向。
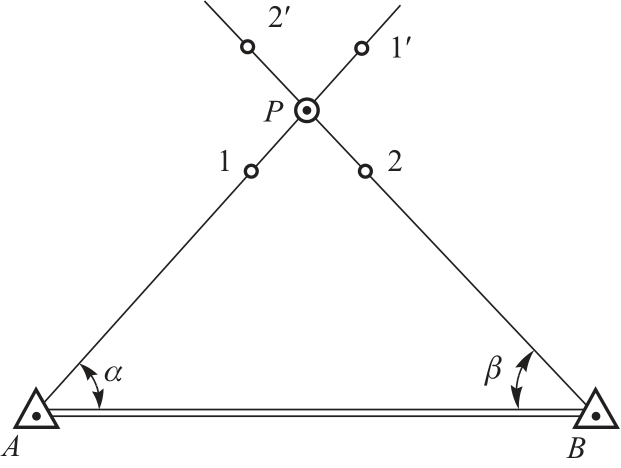
图5-3-7 两方向前方交会法放样
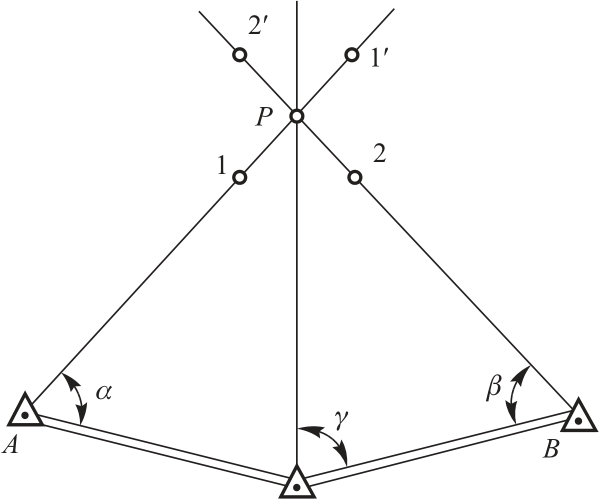
图5-3-8 三方向前方交会法放样
理论上这三个方向应交汇于一点,但由于测量误差的存在,致使三条方向线未交汇于一点,而是两两相交,形成一个示误三角形。一般情况下可取示误三角形的重心位置(三角形三条边中线的交点)作为放样点P的位置,如图5-3-9所示,当放样桥墩台中心位置时,为了确保桥墩台中心在桥轴线垂直方向上的精度,一般取桥轴线以外的另两个方向线的交点在桥轴线方向上的垂足作为桥墩台中心的放样位置,如图5-3-10所示。
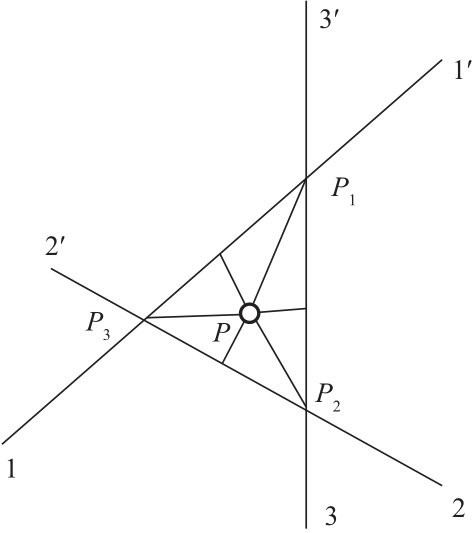
图5-3-9 一般情况下示误三角形处理
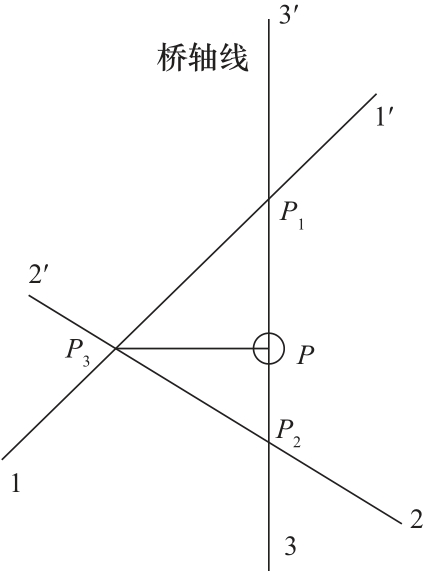
图5-3-10 桥墩台放样时示误三角形处理
3.前方交会固定方向法
在施工过程中,随着工程进展,需要多次交会待放点位置时,可以通过控制点A、C、D或节点C′、D′将交会方向延伸到待放点另一侧,并用觇标牌固定,加以编号。在以后交会时,只需用全站仪照准觇标牌便可直接定向,如图5-3-11所示。为了使交会方向更为精确,需要对延伸方向用归化法进行改正,以提高交会精度。
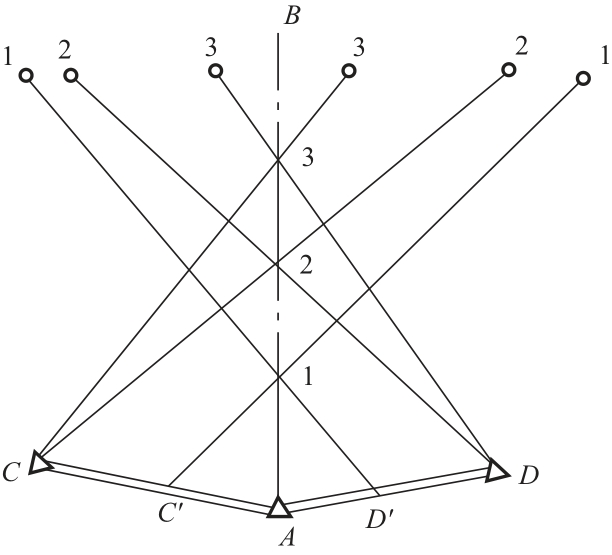
图5-3-11 前方交会固定方向法
5.3.7 轴线交会法
轴线交会法实质上是一种侧方交会。当放样点位于坐标轴线上或与坐标轴线相平行的轴线上时,可用轴线交会法来放样点位。轴线交会法多用于水利枢纽工程轴线上的点位放样。
如图5-3-12所示,M和N是已知控制点,欲用轴线交会法在已知轴线AB上放样出待放点位P。其操作步骤如下:
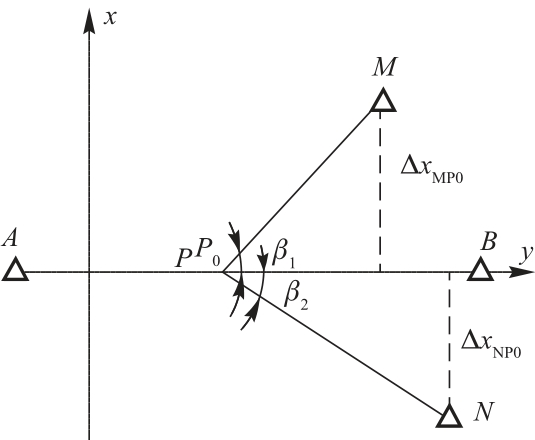
图5-3-12 轴线交会法
先在AB轴线上放出P点的初步位置,记作P0,要求P0点应尽量靠近P点的设计位置。然后在P0点安置全站仪,测得轴线与P0M、P0N之间的夹角β1和β2以求得P0点的坐标值。
由M点求得

由N点求得

式(5-3-5)和式(5-3-6)中的正负号视yP0与yM(或yN)的大小而选取,若yP0<yM(或yP0<yN),则![]() 之前取负号,反之取正号。
之前取负号,反之取正号。
取两组坐标的平均值,作为P0点的最后坐标:

则点实测坐标与点设计坐标的差值为

这样,在轴线方向上从P0点量取![]() 的长度,即可得到设计点位P,但要根据式(5-3-8)判断量距方向。
的长度,即可得到设计点位P,但要根据式(5-3-8)判断量距方向。
采用轴线交会法放样,选择控制点时要求两控制点位于轴线两侧且近似对称,初放点位P0应尽量位于轴线上,以削弱测量误差的影响。

