-
1 基本知识
-
2 课件
-
3 视频与动画
-
4 单元测验
-
5 方向观测法
水平角观测(方向观测法)
水平角的观测方法有多种,现仅介绍工程测量中最常用的两种方法,即测回法和方向观测法。
方向观测法通常用于一个测站上照准目标多于3个的观测。如图3-3-16所示,设O为测站点,A、B、C、D为目标点,在此情况下通常采用方向观测法,水平角方向观测法的技术要求见表3-3-4。
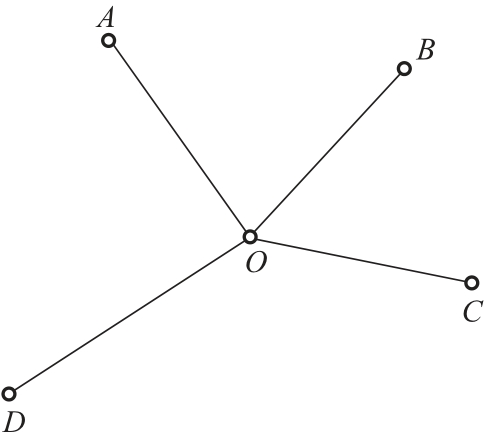
图3-3-16 测站点与目标点
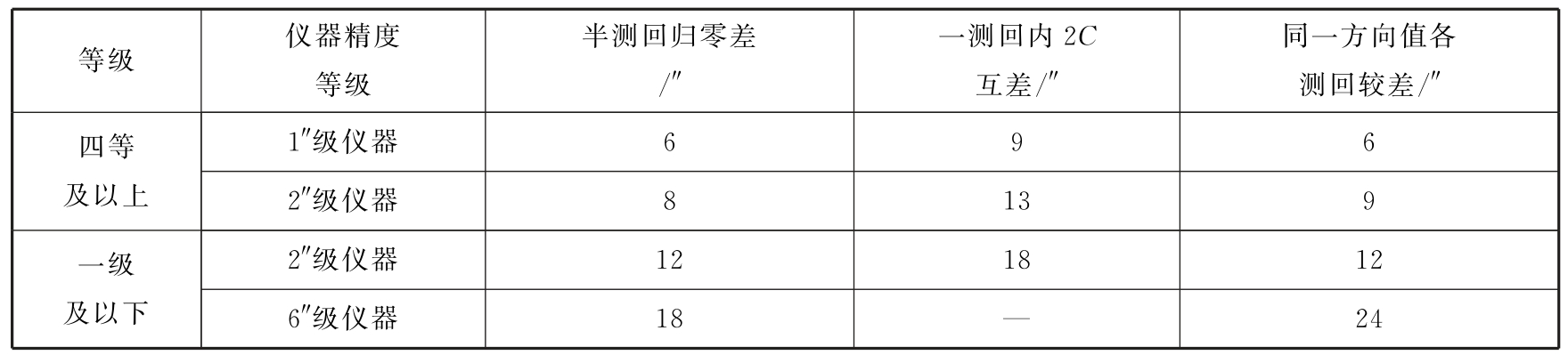
表3-3-4 水平角方向观测法的技术要求
(1)方向观测法的观测步骤。
1)安置全站仪于测站点O上,对中、整平后使仪器处于盘左状态。照准起始方向(又称零方向)A,将水平度盘配置在0°附近(如0°01′32″),读取读数,并记入记录手簿(表3-3-5),松开水平制动螺旋。
表3-3-5 方向观测法观测记录手簿
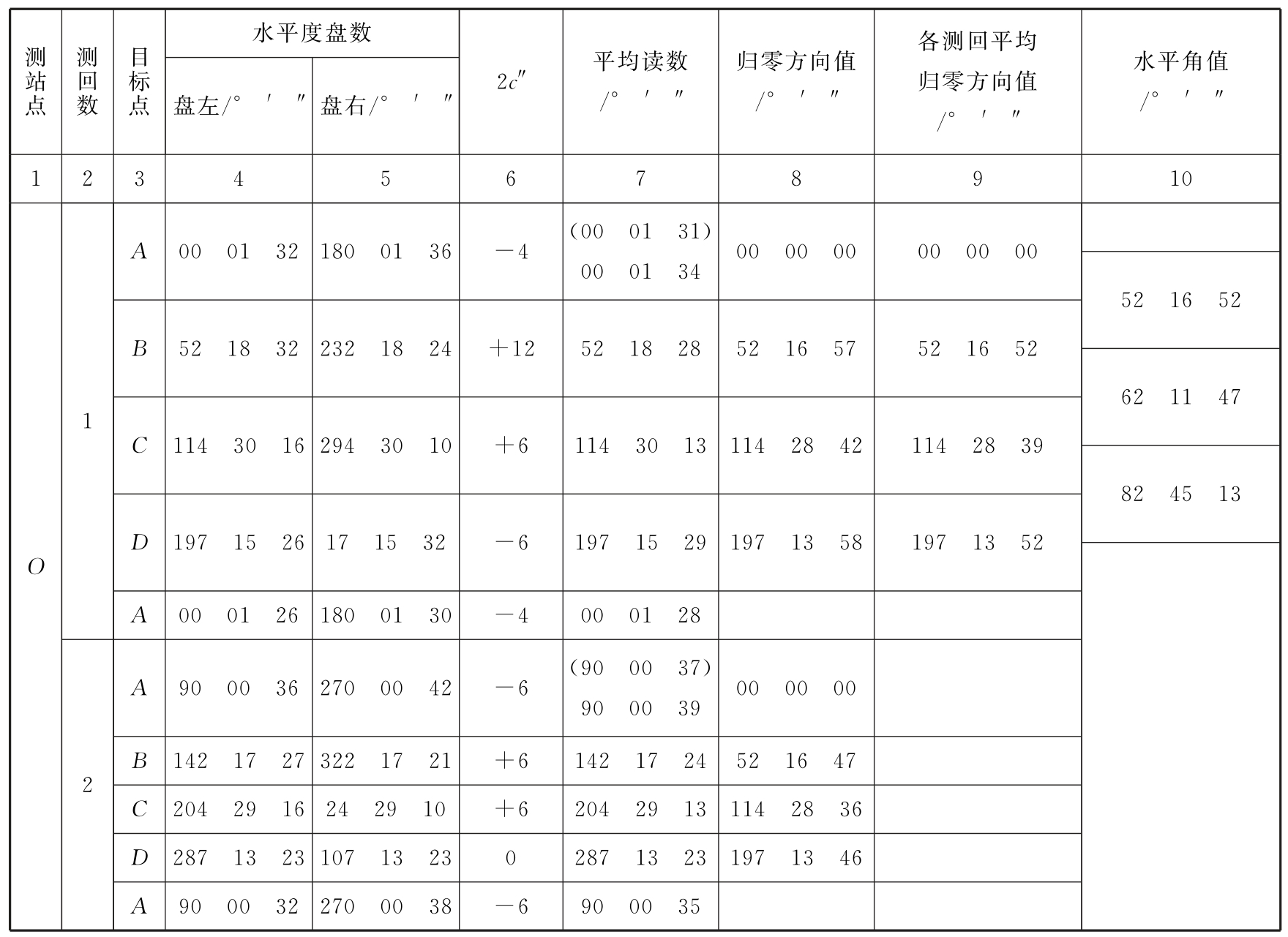
2)按顺时针旋转照准部,照准目标B,读取水平度盘的读数(如52°18′32″),并记入记录手簿(表3-3-5);同样依次观测目标C、D,并读取照准各目标时的水平度盘读数(如114°30′16″、197°15′26″)记入记录手簿;继续顺时针转动望远镜,最后观测零方向A,并读取水平度盘的读数(如0°01′26″)记入记录手簿,此照准A称为归零。此次零方向的水平度盘读数与第一次照准零方向的水平度盘读数之差称为归零差,若归零差满足要求,即完成了上半测回的观测。
3)纵转望远镜使仪器处于盘右状态,再按逆时针方向依次照准目标A、D、C、B、A,称为下半测回。同上半测回一样,照准各目标时,分别读取水平度盘的读数,并记入记录手簿。下半测回也存在归零差,若归零差满足要求,下半测回也告结束。上、下半测回合称为一个测回。
为了提高测量精度,有时要观测若干个测回,各测回的观测方法相同。但是,应与测回法一样,需要将各测回盘左起始方向读数进行设置,依次变换180°/n(n为测回数)。
(2)方向观测法的角值计算。观测完成后,需要进行角值计算,以下结合表3-3-5说明方向观测法的计算步骤。
1)计算两倍照准误差2C值。
![]()
式中,盘左读数大于180°时取“+”号,盘左读数小于180°时取“-”号。按各方向计算出2C值后,填入表3-3-5中的第6栏。2C变动范围是衡量观测质量的一个指标。
2)计算各目标的方向值的平均读数。照准某一目标时,水平度盘的读数,称为该目标的方向值。
方向值的平均读数=[盘左读数+(盘右读数±180°)]/2(式中的加减号取法同前)
将计算的结果填入表3-3-5中的第7栏。
需要说明的是,起始方向有两个平均值,应将这两个平均值再次进行平均,所得结果作为起始方向的方向值的平均读数,填入表3-3-5中的第7栏的上方,并括以括号,如本例中的0°01′31″和90°00′37″。
3)计算归零后的方向值(又称归零方向值)。将起始目标的方向值作为00°00′00″,此时其他各目标对应的方向值称为归零方向值。计算方法为可以将各目标方向值的平均读数减去起始方向值的平均读数(括号内的数),即得各方向的归零方向值,填入表3-3-5中的第8栏。
4)计算各测回归零方向值的平均值。当测回数为两个或两个以上时,从理论上讲,不同测回的同一方向归零后的方向值应相等,但由于误差的原因导致各测回之间有一定的差数,如该差数在限差之内,则可取其平均值作为该方向的最后方向值,填入表3-3-5中的第9栏。
5)计算各目标间的水平角值。在表3-3-5中的第9栏中,显然,后一目标的平均归零方向值减去前一目标的平均归零方向值,即两目标之间的水平角之值,填入表3-3-5中的第10栏。