
固定翼无人机纵向横向和方向稳定性
自学任务
电子教材
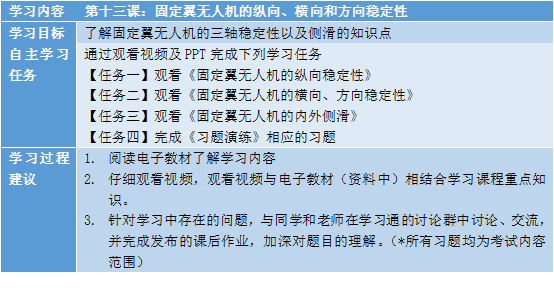
固定翼无人机的纵向稳定性
纵向稳定力矩

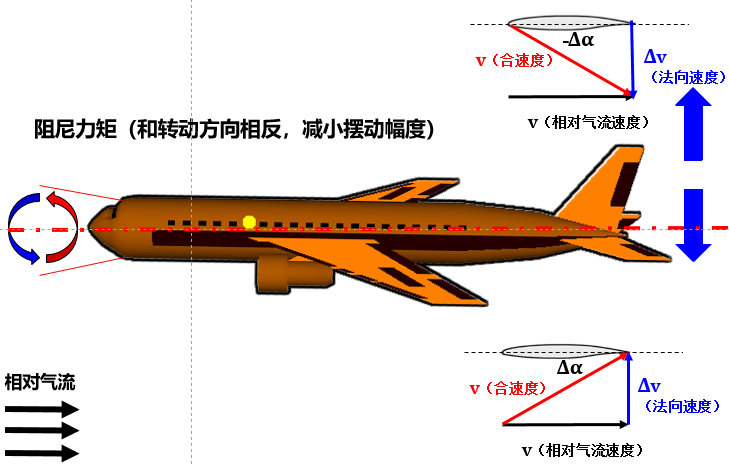
纵向阻尼力矩
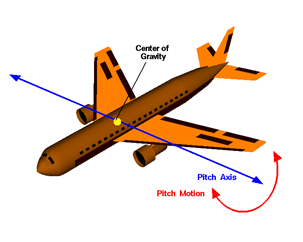
横向稳定力矩

横向阻尼力矩
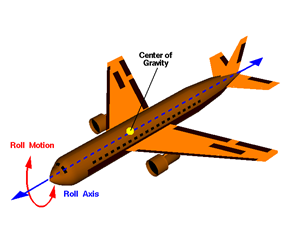
方向稳定力矩

方向阻尼力矩
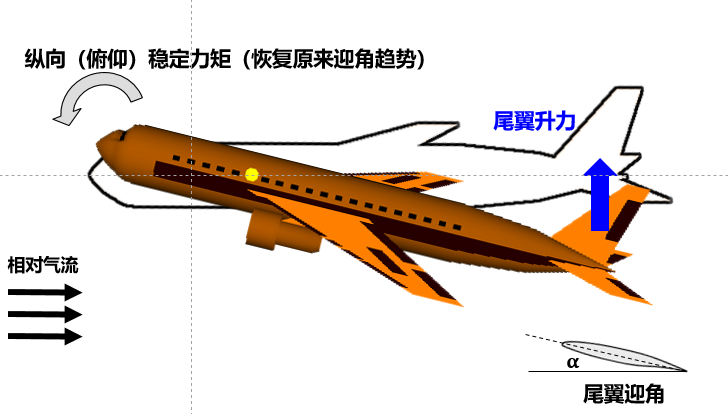
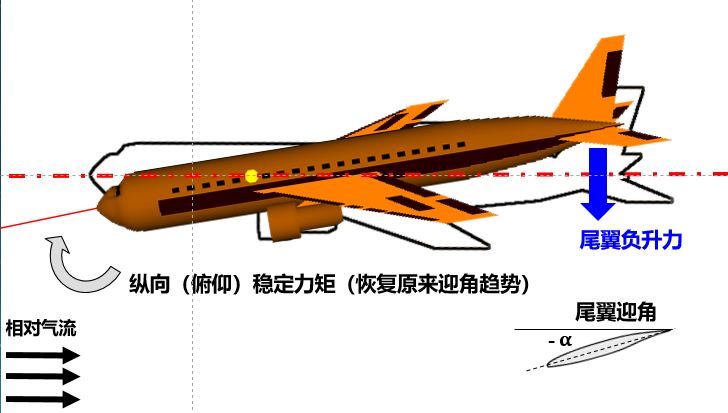
★重点内容:有水平尾翼的固定翼无人机的纵向稳定力矩和阻尼力矩主要都是由水平尾翼产生。
无尾式飞翼无人机
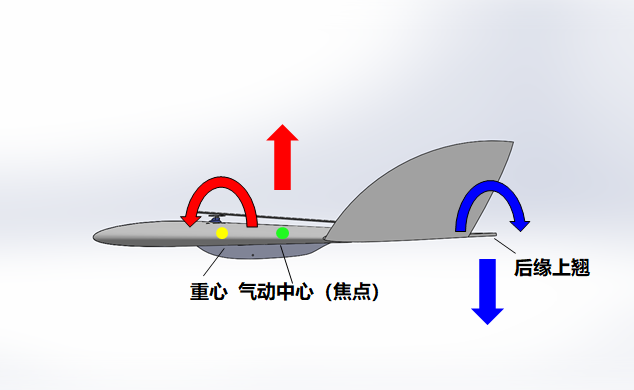
无尾式飞翼无人机的纵向稳定力矩阻尼力矩主要都是由上翘的机翼后缘产生的。
固定翼无人机的横向、方向稳定性:
固定翼无人机的横向稳定性是指固定翼无人机受微小扰动以至横向平衡遭到破坏时,在扰动消失后,具有自动恢复他原来的横向平衡状态的能力。固定翼无人机之所以具有横向稳定性,是横向稳定力矩和横向阻尼力矩共同作用的结果。固定翼无人机的方向稳定性是指固定翼无人机受微小扰动以至方向平衡遭到破坏时,在扰动消失后,具有自动恢复他原来的方向平衡状态的能力。固定翼无人机之所以具有方向稳定性,是方向稳定力矩和方向阻尼力矩共同作用的结果。当方向平衡遭到破坏后,固定翼无人机会产生侧滑现象,方向稳定性主要是在固定翼无人机出现侧滑时由垂直尾翼来保证的。固定翼无人机的横向稳定性与方向稳定性都是固定翼无人机发生侧滑时体现出来的,因此两者间有着紧密的联系,常将这二者统称为侧向稳定性。
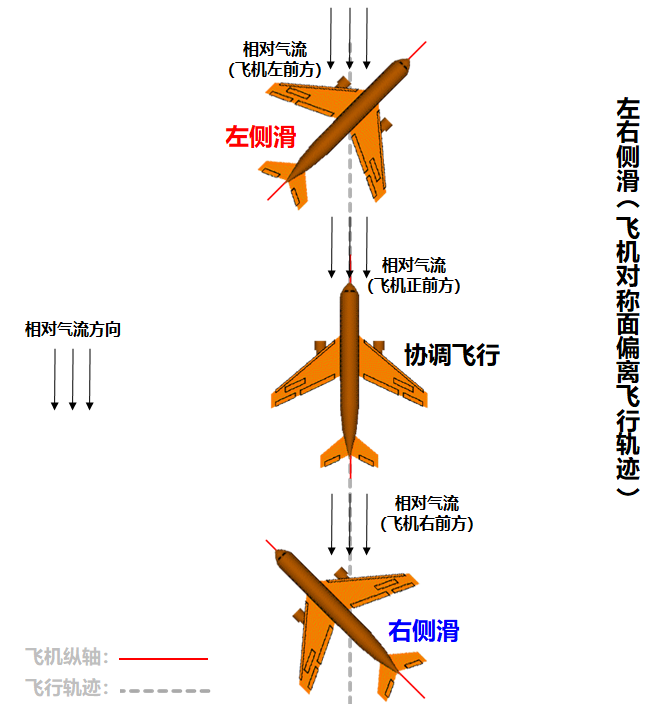
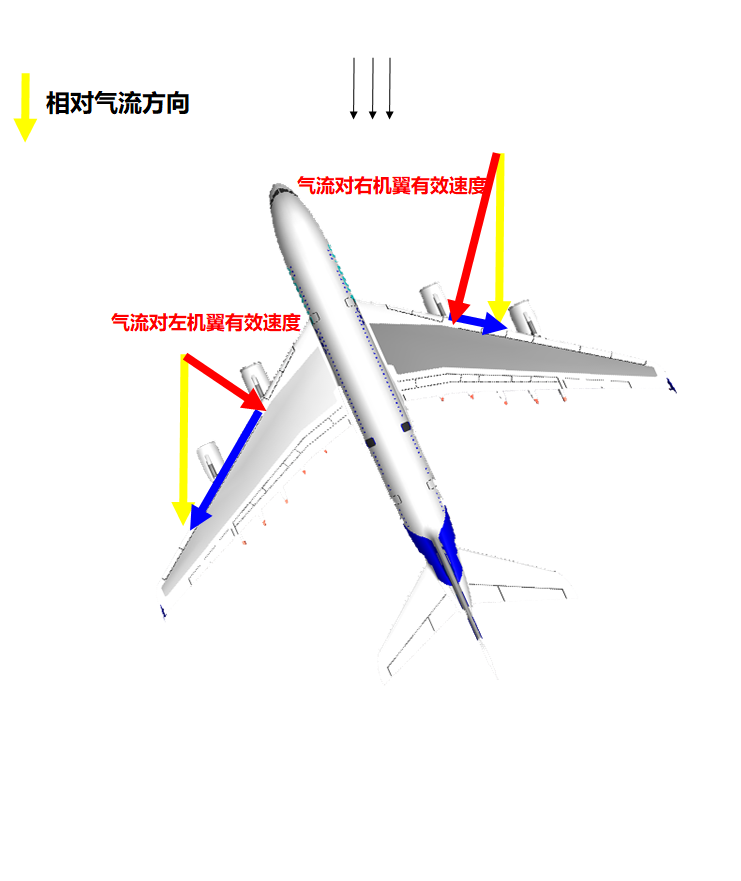
★重点内容:无人机左右侧滑
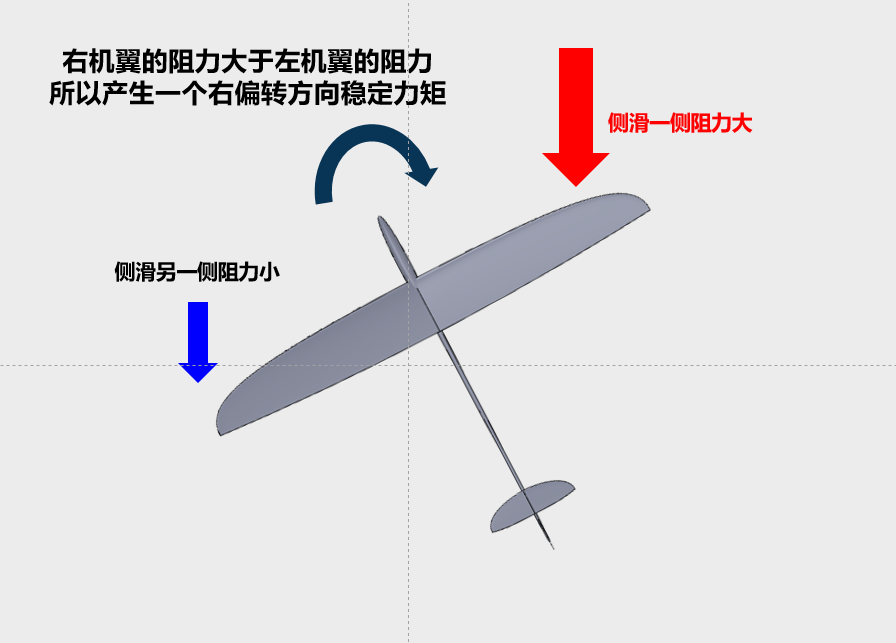
左侧滑相对气流来自机头左前方,尾翼向左侧偏转,右侧滑相对气流来自机头右前方,尾翼向右侧偏转,相对气流方向和无人机纵轴的夹角就是侧滑角。这里只需要记住尾翼的偏转方向就可以分清左右侧滑,不需要再去记忆其他的信息量,以免受到干扰。
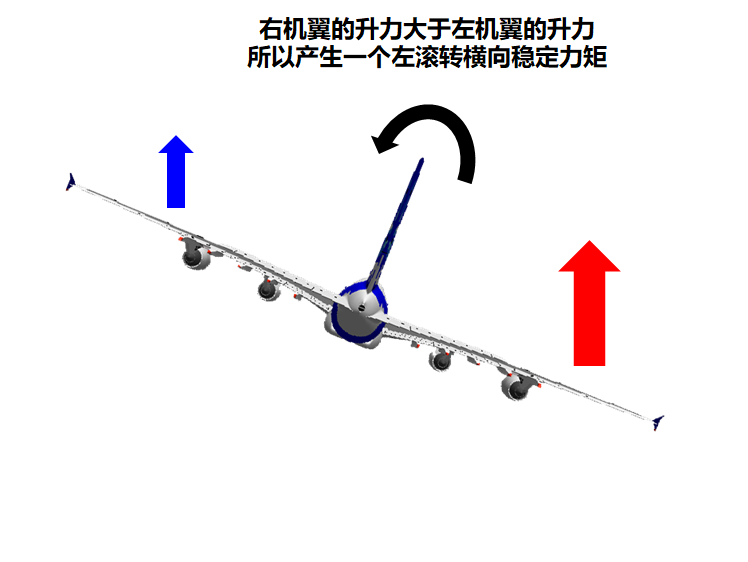
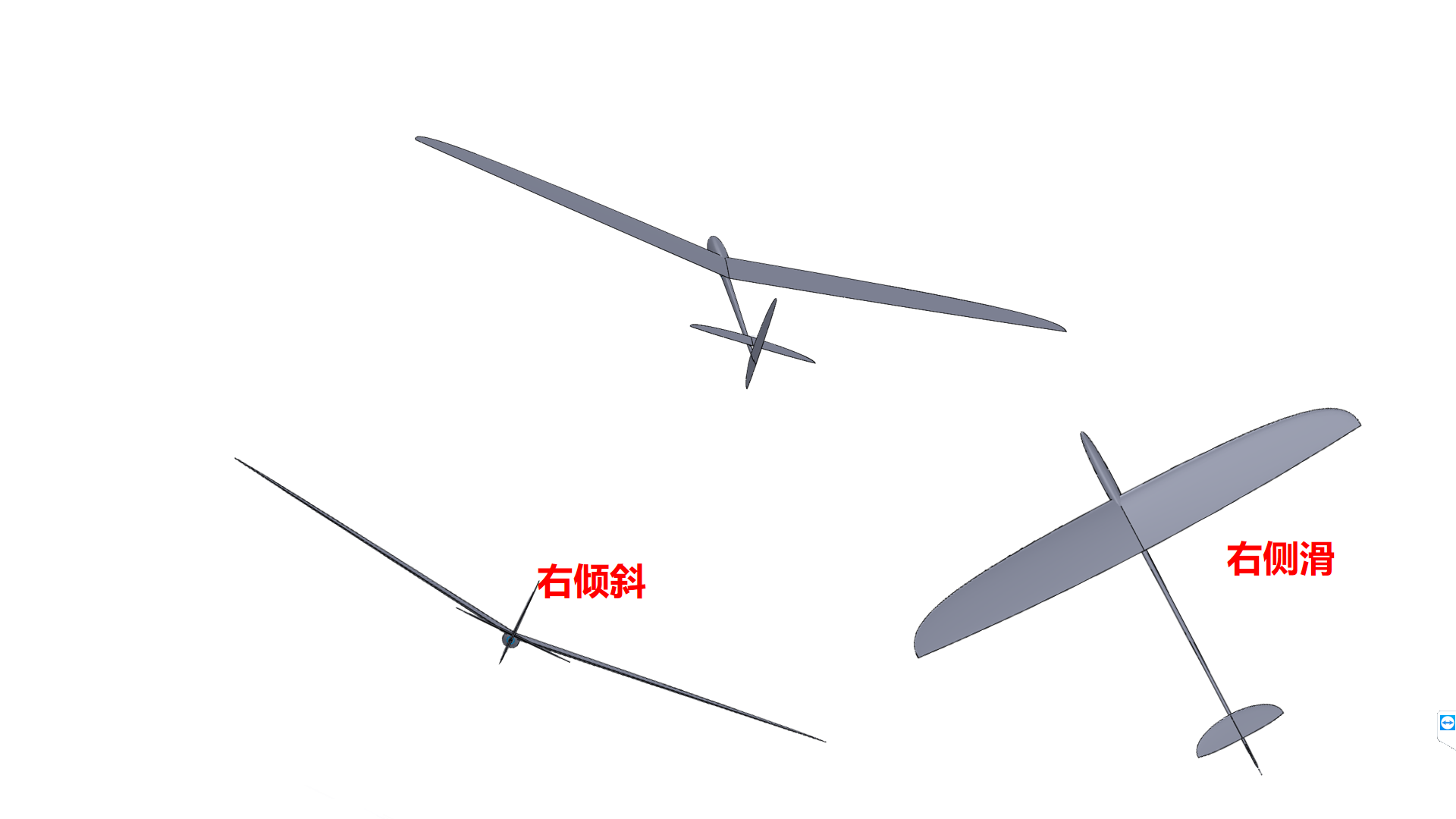
当飞机左侧滑(机尾)时,无人机同时左倾斜,飞机向右侧滑(机尾)时,无人机同时右倾斜。无人机发生以上两种侧滑时,会体现侧向稳定性,在方向上:固定翼无人机的垂直尾翼和上反角同时作用,可以产生使无人机反向偏转的方向力矩;在横向上,固定翼无人机的后掠角可以产生使无人机反向滚转的横向稳定力矩。两种稳定力矩共同作用,使无人机由恢复原平衡状态的趋势。
后掠角产生横向稳定力矩: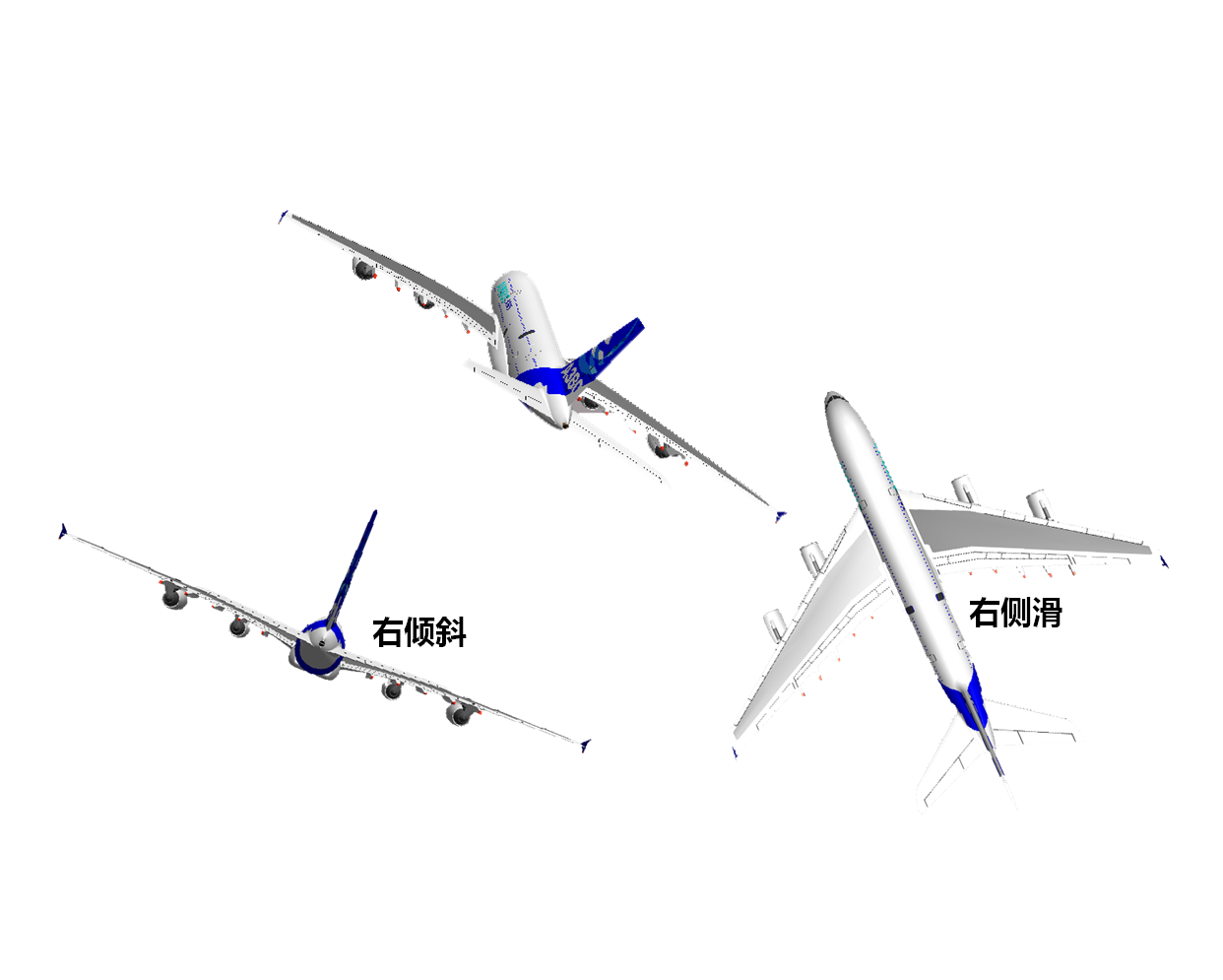
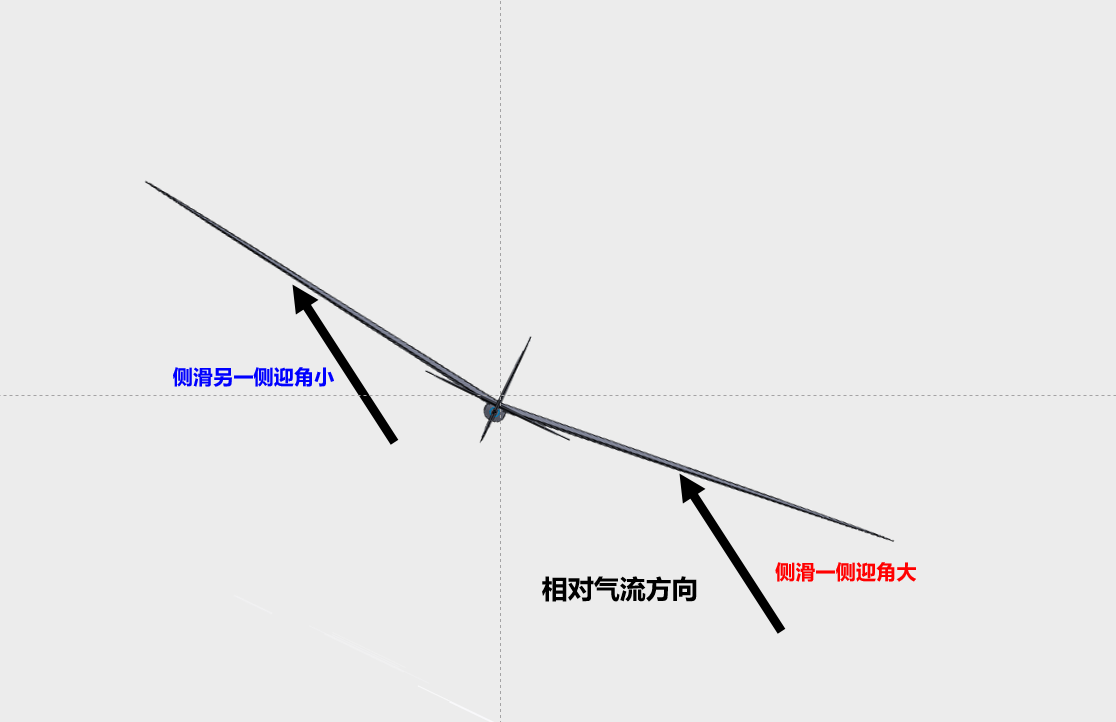
上反角产生方向稳定力矩:
学习完了两种稳定力矩后,我们要知道无人机有了自动恢复原来横向或方向平衡的趋势后,还需要在偏转过程中产生对应的阻尼力矩,使偏转摆动的幅度逐渐减弱直至消失,最终停止摆动,恢复平衡状态。这里的知识点很简单,我们看一下这两种阻尼力矩。
横向阻尼力矩:
固定翼无人机的横向阻尼力矩主要由机翼产生的。
方向阻尼力矩:
固定翼无人机的方向阻尼力矩主要由垂直尾翼、机身、背鳍和腹鳍等部件产生的。
无人翼无人机的内外侧滑
无人机协调飞行
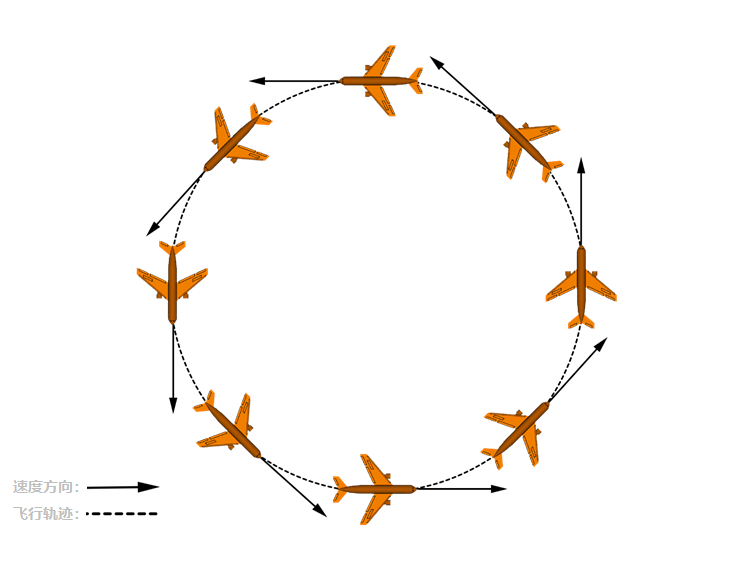
无人机转弯
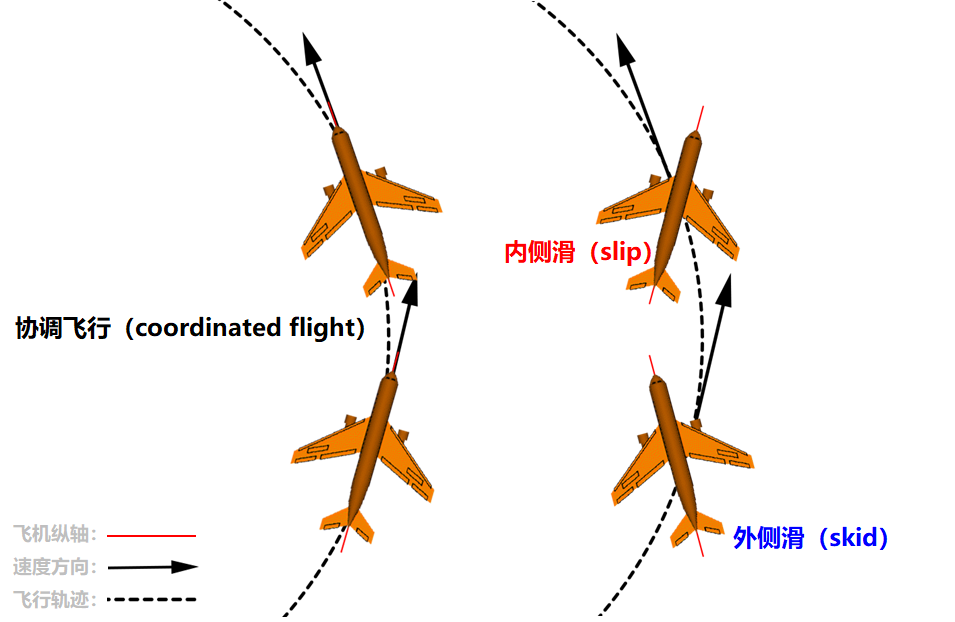
★重点内容:无人机内外侧滑:
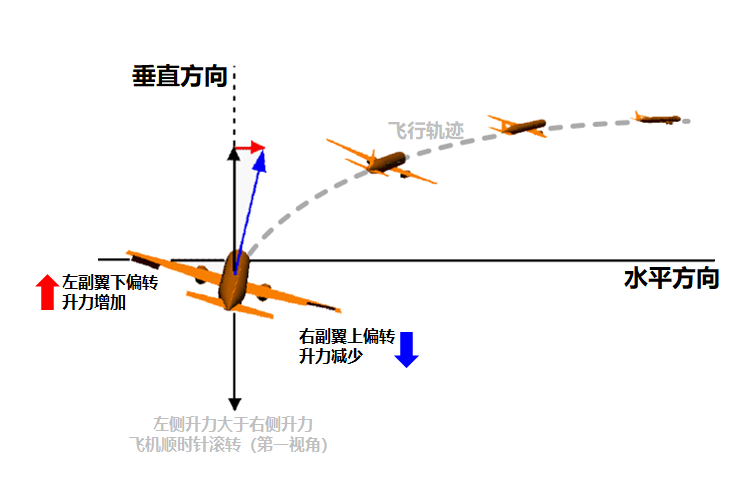
在空气动力学上,比如要使飞机向右转弯,顺时针转动操纵盘,于是左侧副翼放下,右侧副翼抬起,这样左侧机翼升力大于右侧,机身沿着纵轴顺时针方向横滚(roll),因此航向向右侧转向。但此时由于左侧放下的副翼产生的阻力,造成飞机的反向偏航(adverseyaw),于是机首偏向相反的左侧,转向的速率降低,效率降低。这个现象就是“slip”,内侧滑现象尾翼向内,因为机身并不正对着正面的气流,说白了就是斜着飞,侧着飞,像是螃蟹横着走。为了修正反向偏航,需要踩右侧方向舵踏板rudder,使机首沿着垂直轴向右侧偏航。但是此时如果修正量过大,机身侧滑量大于所需要的角度,这个现象就是“skid”,外侧滑现象尾翼向外,可以联想上面的赛车手的故意侧滑的例子,这样比较容易记忆。

