项目任务
-
1 1 任务...
-
2 2 任务...
上一节
下一节
任务书:基于PLC的正反转电路设计,要求以文档形式上交材料
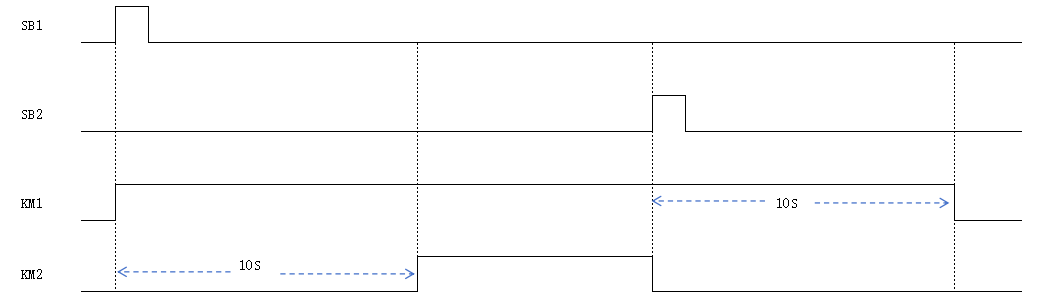
设计一个三相异步电动机的“正-停-反”控制。按下正转按钮,电动机正转启动,按下停止按钮,电动机立即停止。在正转过程中,按下反转按钮无效,电动机仍然正转。同样,在反转过程中,按下正转按钮无效,电动机仍然反转。若发生电机过载情况,电机立即停止。其中正转按钮、反转按钮和停止按钮都是常开触点按钮。
一、绘制电路图
1、电路图

图为CPU1212C DC/DC/DC

2、教学视频
二、编写程序
1、要求:
1.采用起保停方式完成本任务;
2.采用置位和复位指令完成本任务;
3.采用RS指令和SR指令完成本任务。
4.触摸屏联动控制
2、教学视频
三、形成文档并提交作业
1、要求
内容包含:
项目题目【标题三】
一、任务描述【标题四】
二、IO分配表【标题四】
三、电路图【标题四】
四、程序【标题四】
五、总结【标题四】
注意:所有图采用题注形式